
一种衣模机器人两自由度肩关节驱动装置.pdf

猫巷****雪凝


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种衣模机器人两自由度肩关节驱动装置.pdf
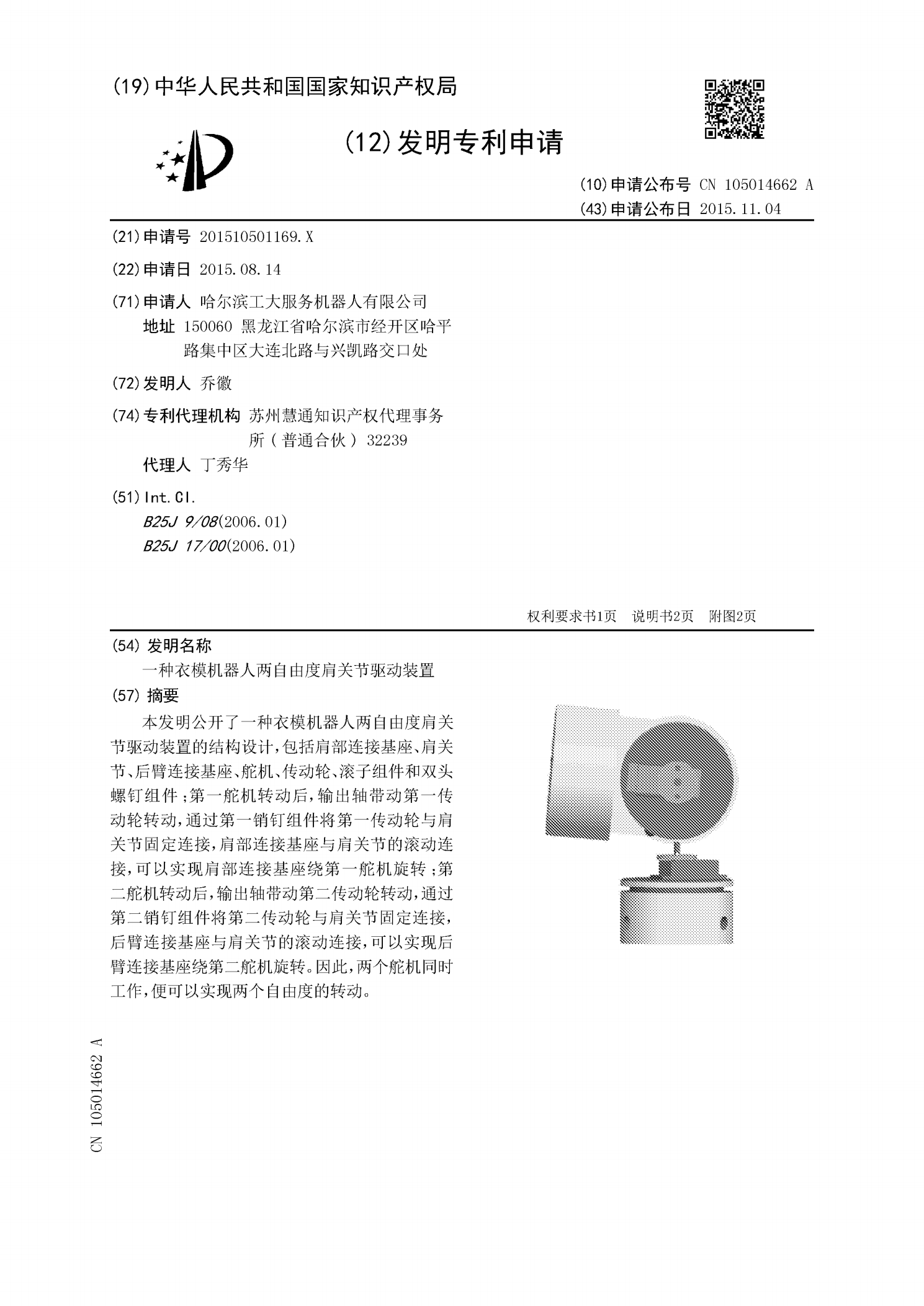
本发明公开了一种衣模机器人两自由度肩关节驱动装置的结构设计,包括肩部连接基座、肩关节、后臂连接基座、舵机、传动轮、滚子组件和双头螺钉组件;第一舵机转动后,输出轴带动第一传动轮转动,通过第一销钉组件将第一传动轮与肩关节固定连接,肩部连接基座与肩关节的滚动连接,可以实现肩部连接基座绕第一舵机旋转;第二舵机转动后,输出轴带动第二传动轮转动,通过第二销钉组件将第二传动轮与肩关节固定连接,后臂连接基座与肩关节的滚动连接,可以实现后臂连接基座绕第二舵机旋转。因此,两个舵机同时工作,便可以实现两个自由度的转动。
一种衣模机器人两自由度肘关节驱动装置.pdf
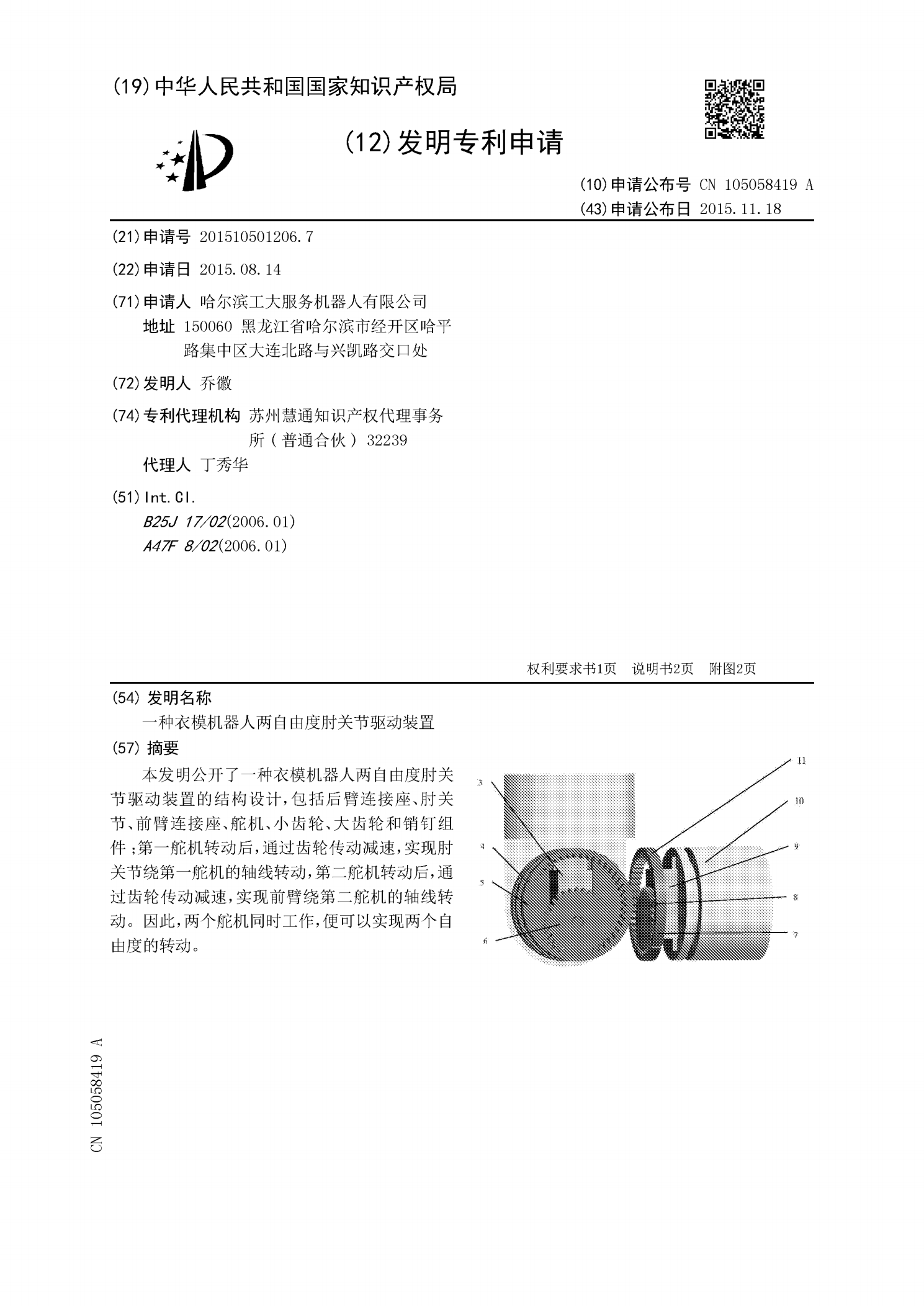
本发明公开了一种衣模机器人两自由度肘关节驱动装置的结构设计,包括后臂连接座、肘关节、前臂连接座、舵机、小齿轮、大齿轮和销钉组件;第一舵机转动后,通过齿轮传动减速,实现肘关节绕第一舵机的轴线转动,第二舵机转动后,通过齿轮传动减速,实现前臂绕第二舵机的轴线转动。因此,两个舵机同时工作,便可以实现两个自由度的转动。

一种电机驱动两自由度机器人关节总成.pdf
本发明公开一种电机驱动两自由度机器人关节总成,包括第一电机总成、减速机构总成和第二电机总成;减速机构总成的内齿圈与第二电机总成的第二电机壳体刚性连接,减速机构总成通过交叉滚子轴承连接到第一电机总成的第一电机壳体上,且减速机构总成可相对第一电机壳体转动;减速机构总成包括两套行星减速轮系,两套行星减速轮系分别用于实现髋关节和膝关节电机输出扭矩的放大。本发明中的电机驱动两自由度机器人关节总成,两组行星减速轮系共用一件内齿轮圈,且均采用一级减速,显著简化了结构复杂度,使机器人关节具有较好的逆驱性,结构简单紧凑等优

两自由度压电惯性驱动管道机器人.pdf
本发明涉及一种两自由度压电惯性驱动管道机器人,其包括第一主体、第二主体、柔性连接板、板簧片、压电堆、支撑足、压电振子组件和压电微型注射器,柔性连接板的第一端与第一主体连接,且其第二端通过调节螺栓与板簧片的第一端固定连接,板簧片的第二端上部设有摩擦球,压电堆的第一端和第二端分别与第二主体和柔性连接板连接,支撑足的第一端和第二端分别通过第一螺栓和第二螺栓与第一主体以及第二主体连接,且压电振子设于第一主体上,压电微型注射器设于第二主体上。本发明的管道机器人结构简单,可以在管道内实现多自由度运动,并且第一主体和第

一种单驱动源三自由度欠驱动机器人手腕装置.pdf
本发明公开了一种单驱动源三自由度欠驱动机器人手腕装置,包括:形成具有内部空间的箱体、末端连杆、旋转连杆、大拇指、固定导轮部件、第一绳索和第二绳索,末端连杆的一端通过旋转连杆与大拇指相连接,所述末端连杆的另一端与固定导轮部件、第一绳索和第二绳索之间固定连接,所述固定导轮部件、第一绳索和第二绳索在末端连杆上依次排列。通过上述方式,本发明能够提供一种单驱动源三自由度欠驱动机器人手腕装置,采用单一动力源驱动的绳子作为输入端,且经过一个欠驱动系统的传动,带动作为输出端的末端连杆作三自由度运动,运用此方式构成的机器人