
一种单驱动源三自由度欠驱动机器人手腕装置.pdf

冬易****娘子


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种单驱动源三自由度欠驱动机器人手腕装置.pdf
本发明公开了一种单驱动源三自由度欠驱动机器人手腕装置,包括:形成具有内部空间的箱体、末端连杆、旋转连杆、大拇指、固定导轮部件、第一绳索和第二绳索,末端连杆的一端通过旋转连杆与大拇指相连接,所述末端连杆的另一端与固定导轮部件、第一绳索和第二绳索之间固定连接,所述固定导轮部件、第一绳索和第二绳索在末端连杆上依次排列。通过上述方式,本发明能够提供一种单驱动源三自由度欠驱动机器人手腕装置,采用单一动力源驱动的绳子作为输入端,且经过一个欠驱动系统的传动,带动作为输出端的末端连杆作三自由度运动,运用此方式构成的机器人

一种单驱动源三自由度欠驱动机器人手腕固定装置.pdf
本发明公开了一种单驱动源三自由度欠驱动机器人手腕固定装置,包括:第一固定导轮部件、第二固定导轮部件、第三固定导轮部件、第四固定导轮部件、第五固定导轮部件、第一滑动导轮部件和第二滑动导轮部件,所述第一固定导轮部件与第五固定导轮部件之间设置有末端连杆。通过上述方式,本发明能够提供一种单驱动源三自由度欠驱动机器人手腕固定装置,采用单一动力源驱动的绳子作为输入端,且经过一个欠驱动系统的传动,带动作为输出端的末端连杆作三自由度运动,运用此方式构成的机器人动力源少,手腕的体积也比现有技术中的机器人手腕小,重量轻,且成
一种欠驱动仿生手腕装置.pdf
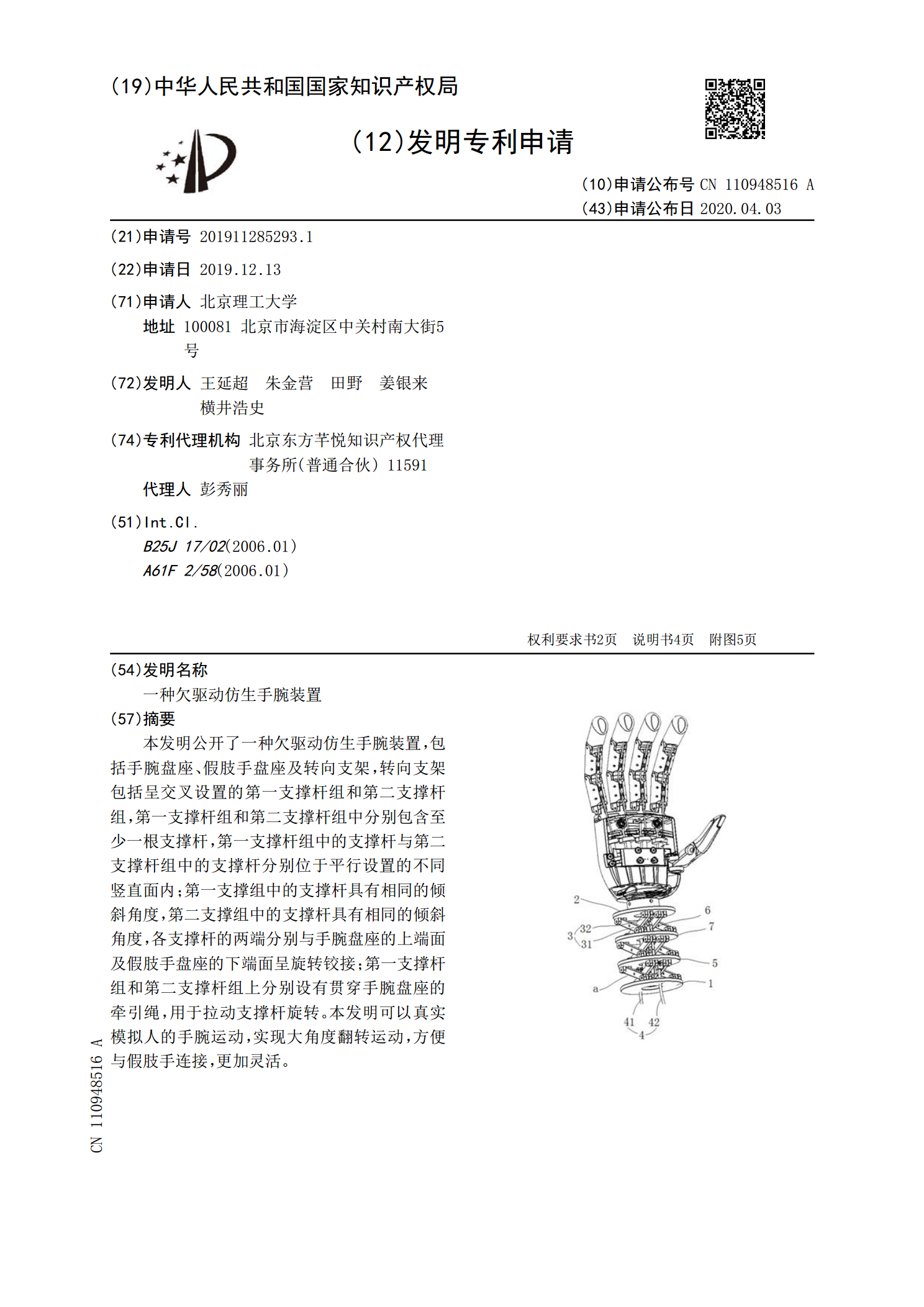
本发明公开了一种欠驱动仿生手腕装置,包括手腕盘座、假肢手盘座及转向支架,转向支架包括呈交叉设置的第一支撑杆组和第二支撑杆组,第一支撑杆组和第二支撑杆组中分别包含至少一根支撑杆,第一支撑杆组中的支撑杆与第二支撑杆组中的支撑杆分别位于平行设置的不同竖直面内;第一支撑组中的支撑杆具有相同的倾斜角度,第二支撑组中的支撑杆具有相同的倾斜角度,各支撑杆的两端分别与手腕盘座的上端面及假肢手盘座的下端面呈旋转铰接;第一支撑杆组和第二支撑杆组上分别设有贯穿手腕盘座的牵引绳,用于拉动支撑杆旋转。本发明可以真实模拟人的手腕运动

一种单电机驱动的绳驱式欠驱动攀爬机器人.pdf
本发明涉及爬行机器人技术领域,具体地说是一种单电机驱动的绳驱式欠驱动攀爬机器人,其中前轮组件设于底盘前端,底盘后端设有辅助轮,侧肢节分设于底盘两侧,单电机驱动机构设于底盘上,且单电机驱动机构设有输出轴,所述输出轴前端通过前轮离合器与蜗杆相连,在前轮组件上设有蜗轮,且蜗杆与所述蜗轮啮合,输出轴后端通过抱持离合器与侧肢节驱动轴相连,侧肢节分别通过钢丝驱动,且所述钢丝缠绕于侧肢节驱动轴上,前轮离合器内设有前轮离合弹簧连接输出轴和蜗杆,抱持离合器内设有抱持离合弹簧连接输出轴和侧肢节驱动轴,所述前轮离合弹簧和抱持离

基于球形空间的欠驱动机器人手腕机构.pdf
本发明涉及一种基于球形空间的欠驱动机器人手腕机构。它包括,一个执行连接体和一个臂架,所述执行连接体有一个球形空腔,在该球形空腔中心处有上下两片可调圆板通过螺栓与臂架固定连接;三个动力架可根据需要固定在可调圆板中不同的螺栓孔中,该三个动力架中的两个动力架端部各装有一个动力源,动力源经一个牙嵌式离合器连接一根滚轮轴,滚轮轴上各装一个滚轮,该滚轮与执行连接体球形空腔的内壁滚动接触;另一个动力架端部直接装有一个滚轮且与执行连接体球形空腔的内壁滚动接触。因为本基于球形空间的欠驱动机器人手腕机构的滚轮和执行连接体是纯