
一种电机驱动两自由度机器人关节总成.pdf

邻家****文章


1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电机驱动两自由度机器人关节总成.pdf
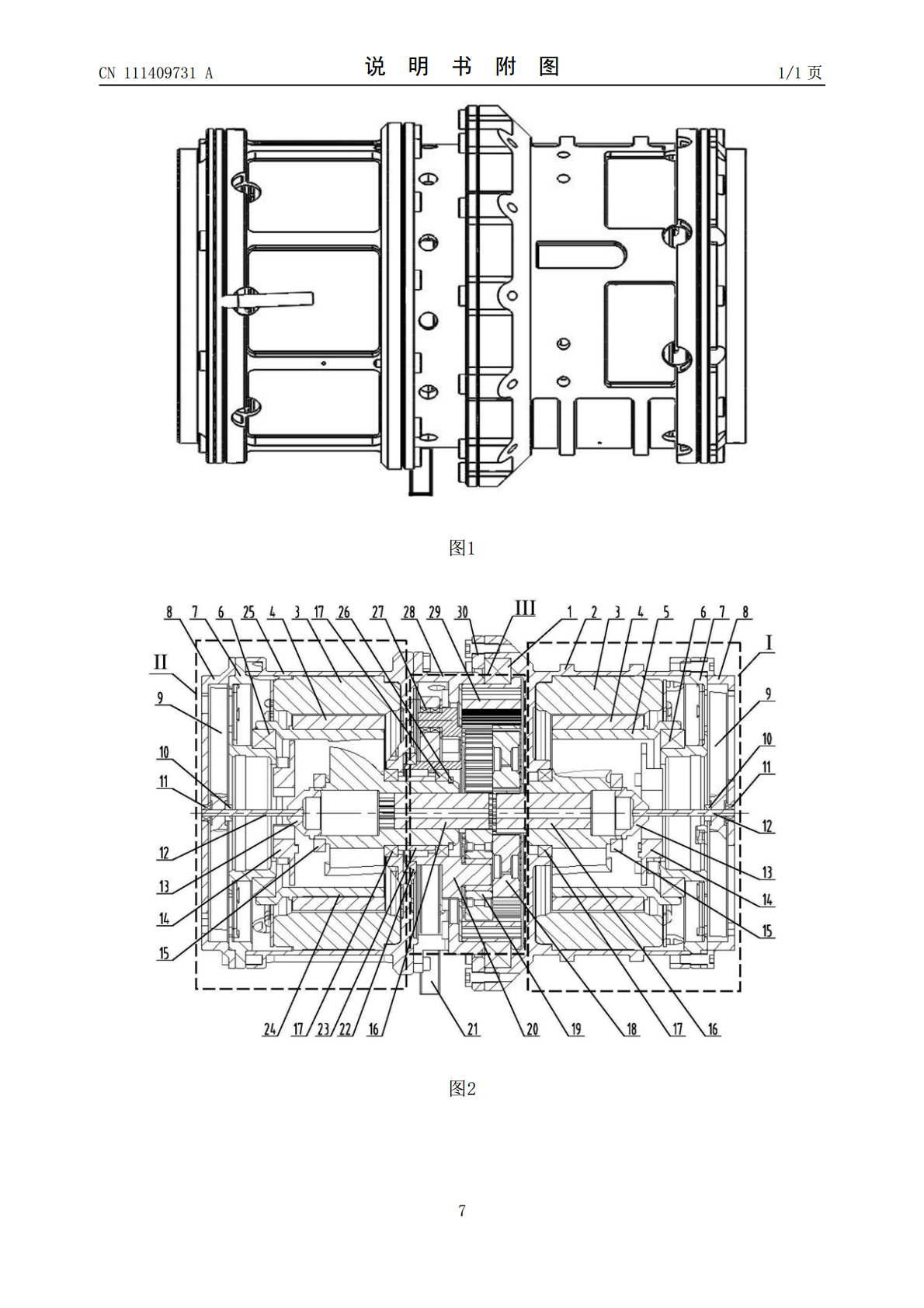
本发明公开一种电机驱动两自由度机器人关节总成,包括第一电机总成、减速机构总成和第二电机总成;减速机构总成的内齿圈与第二电机总成的第二电机壳体刚性连接,减速机构总成通过交叉滚子轴承连接到第一电机总成的第一电机壳体上,且减速机构总成可相对第一电机壳体转动;减速机构总成包括两套行星减速轮系,两套行星减速轮系分别用于实现髋关节和膝关节电机输出扭矩的放大。本发明中的电机驱动两自由度机器人关节总成,两组行星减速轮系共用一件内齿轮圈,且均采用一级减速,显著简化了结构复杂度,使机器人关节具有较好的逆驱性,结构简单紧凑等优
一种衣模机器人两自由度肘关节驱动装置.pdf
本发明公开了一种衣模机器人两自由度肘关节驱动装置的结构设计,包括后臂连接座、肘关节、前臂连接座、舵机、小齿轮、大齿轮和销钉组件;第一舵机转动后,通过齿轮传动减速,实现肘关节绕第一舵机的轴线转动,第二舵机转动后,通过齿轮传动减速,实现前臂绕第二舵机的轴线转动。因此,两个舵机同时工作,便可以实现两个自由度的转动。
一种衣模机器人两自由度肩关节驱动装置.pdf
本发明公开了一种衣模机器人两自由度肩关节驱动装置的结构设计,包括肩部连接基座、肩关节、后臂连接基座、舵机、传动轮、滚子组件和双头螺钉组件;第一舵机转动后,输出轴带动第一传动轮转动,通过第一销钉组件将第一传动轮与肩关节固定连接,肩部连接基座与肩关节的滚动连接,可以实现肩部连接基座绕第一舵机旋转;第二舵机转动后,输出轴带动第二传动轮转动,通过第二销钉组件将第二传动轮与肩关节固定连接,后臂连接基座与肩关节的滚动连接,可以实现后臂连接基座绕第二舵机旋转。因此,两个舵机同时工作,便可以实现两个自由度的转动。
一种三电机驱动的二自由度关节结构.pdf
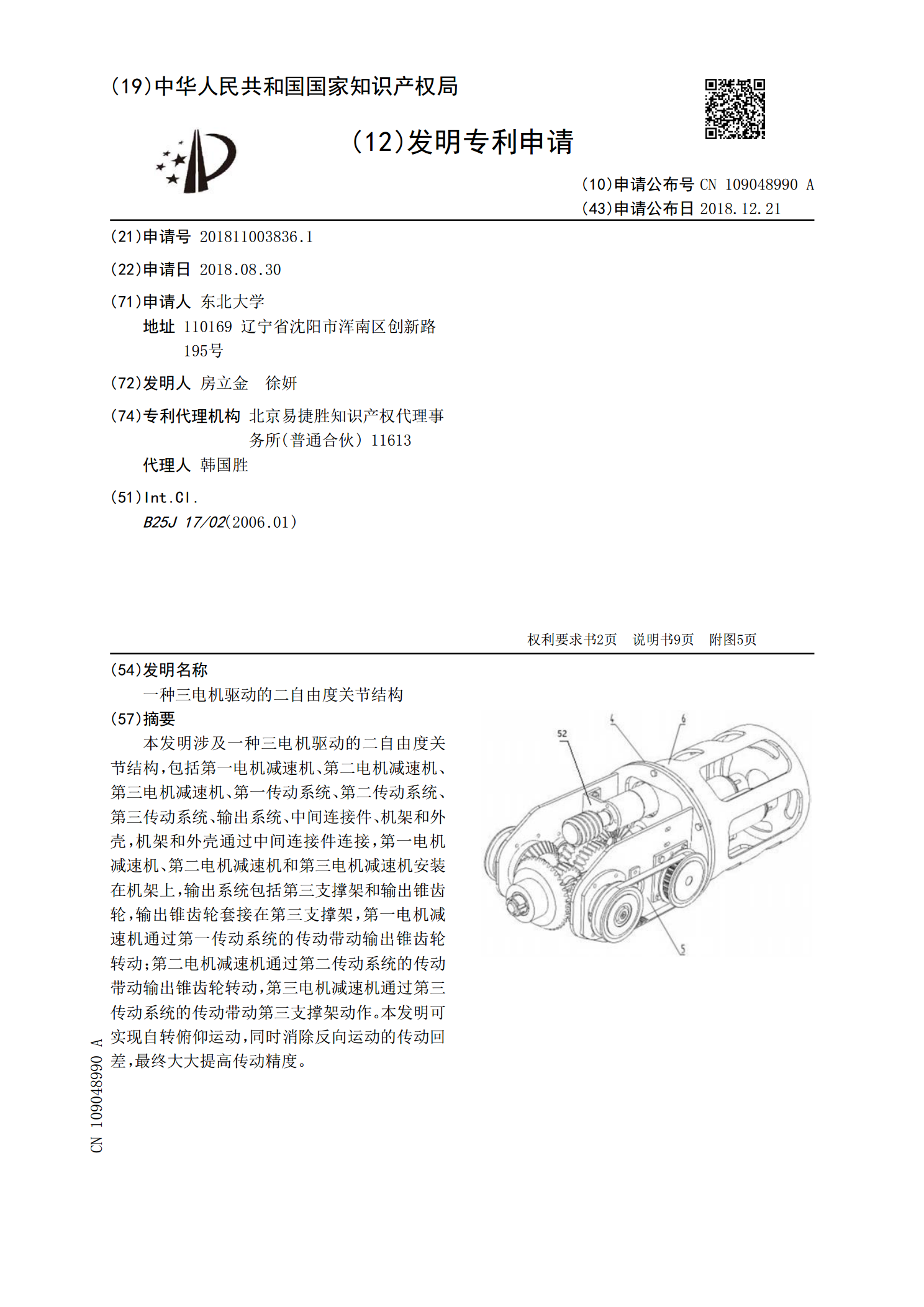
本发明涉及一种三电机驱动的二自由度关节结构,包括第一电机减速机、第二电机减速机、第三电机减速机、第一传动系统、第二传动系统、第三传动系统、输出系统、中间连接件、机架和外壳,机架和外壳通过中间连接件连接,第一电机减速机、第二电机减速机和第三电机减速机安装在机架上,输出系统包括第三支撑架和输出锥齿轮,输出锥齿轮套接在第三支撑架,第一电机减速机通过第一传动系统的传动带动输出锥齿轮转动;第二电机减速机通过第二传动系统的传动带动输出锥齿轮转动,第三电机减速机通过第三传动系统的传动带动第三支撑架动作。本发明可实现自转

一种空间机器人的两自由度关节.pdf
本发明公开了一种空间机器人的两自由度关节包括两关节驱动组件、关节传动组件,可以实现关节两自由度运动,通过调节两个电机的转速和转角,可以实现关节俯仰、旋转、两者合成的三种运动方式。关节传动组件是由两个输入锥齿轮和一个输出锥齿轮构成的差动运动机构。两个输入锥齿轮分别与各自对应的准双曲面齿轮固连,输出法兰与输出锥齿轮固连。电机力矩通过与其连接的行星减速器的一级减速,再由准双曲面齿轮进行二级减速,最后通过锥齿轮差动机构将力矩传递到输出端。由于两级减速的减速比很大,使得该机构输出力矩很大,具有很强的负载能力。