
两自由度压电惯性驱动管道机器人.pdf

书生****瑞梦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

两自由度压电惯性驱动管道机器人.pdf
本发明涉及一种两自由度压电惯性驱动管道机器人,其包括第一主体、第二主体、柔性连接板、板簧片、压电堆、支撑足、压电振子组件和压电微型注射器,柔性连接板的第一端与第一主体连接,且其第二端通过调节螺栓与板簧片的第一端固定连接,板簧片的第二端上部设有摩擦球,压电堆的第一端和第二端分别与第二主体和柔性连接板连接,支撑足的第一端和第二端分别通过第一螺栓和第二螺栓与第一主体以及第二主体连接,且压电振子设于第一主体上,压电微型注射器设于第二主体上。本发明的管道机器人结构简单,可以在管道内实现多自由度运动,并且第一主体和第

基于两自由度压电驱动快反镜的星光跟踪控制.docx
基于两自由度压电驱动快反镜的星光跟踪控制基于两自由度压电驱动快反镜的星光跟踪控制摘要随着天文观测技术的不断发展,星光跟踪控制在天文学领域中变得越来越重要。本论文研究基于两自由度压电驱动快反镜的星光跟踪控制系统。首先介绍了星光跟踪的原理和意义,然后详细介绍了压电驱动快反镜的结构和特性。接着讨论了基于两自由度压电驱动快反镜的星光跟踪控制算法和控制系统设计,包括位置控制和角度控制两个方面。最后,通过实验验证了该控制系统的有效性和准确性。关键词:星光跟踪;压电驱动快反镜;位置控制;角度控制引言星光跟踪是一项重要的
一种两自由度压电驱动平台及其设计方法.pdf
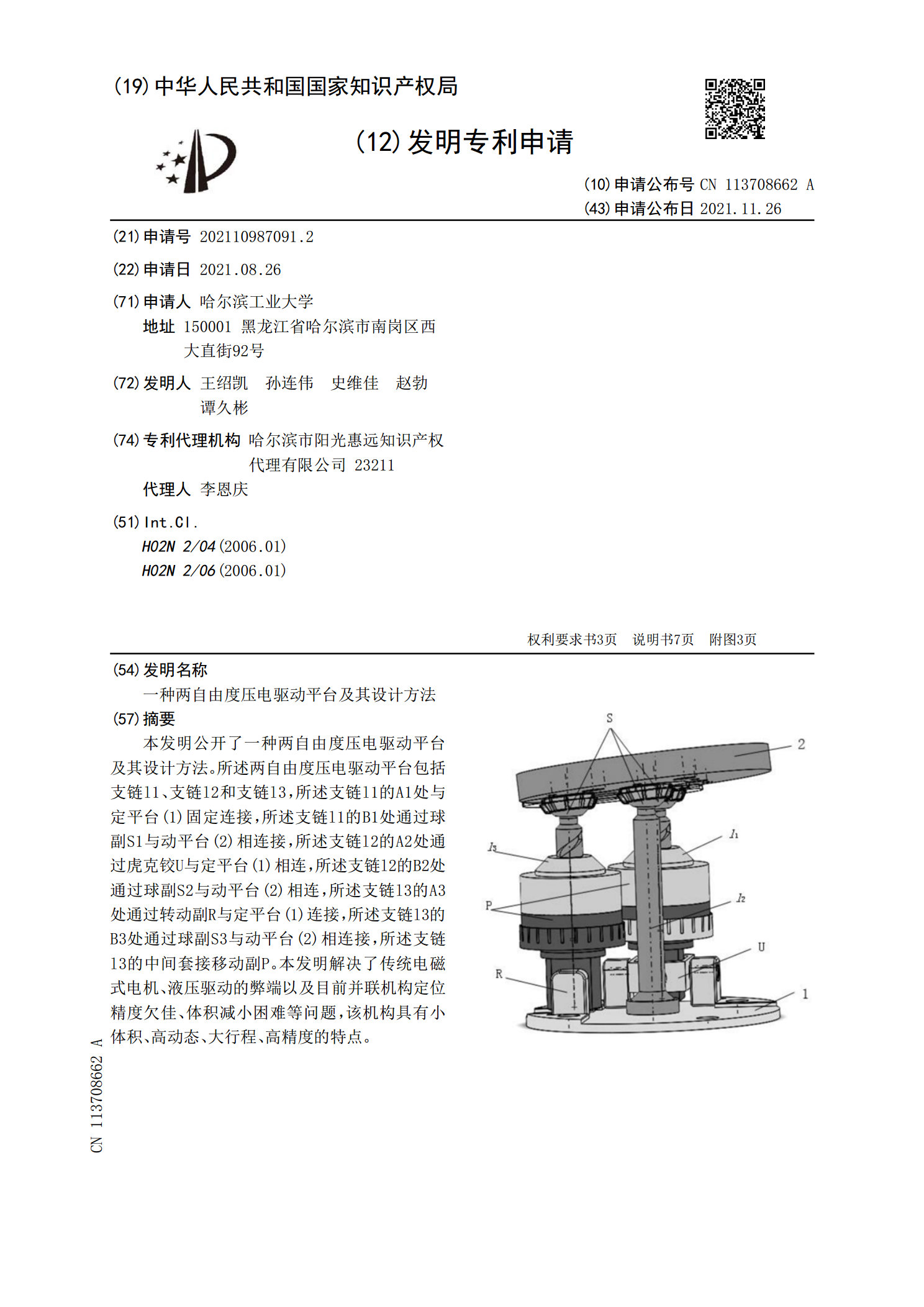
本发明公开了一种两自由度压电驱动平台及其设计方法。所述两自由度压电驱动平台包括支链l1、支链l2和支链l3,所述支链l1的A1处与定平台(1)固定连接,所述支链l1的B1处通过球副S1与动平台(2)相连接,所述支链l2的A2处通过虎克铰U与定平台(1)相连,所述支链l2的B2处通过球副S2与动平台(2)相连,所述支链l3的A3处通过转动副R与定平台(1)连接,所述支链l3的B3处通过球副S3与动平台(2)相连接,所述支链l3的中间套接移动副P。本发明解决了传统电磁式电机、液压驱动的弊端以及目前并联机构定位
基于压电驱动的集成式两自由度步进执行器.pdf
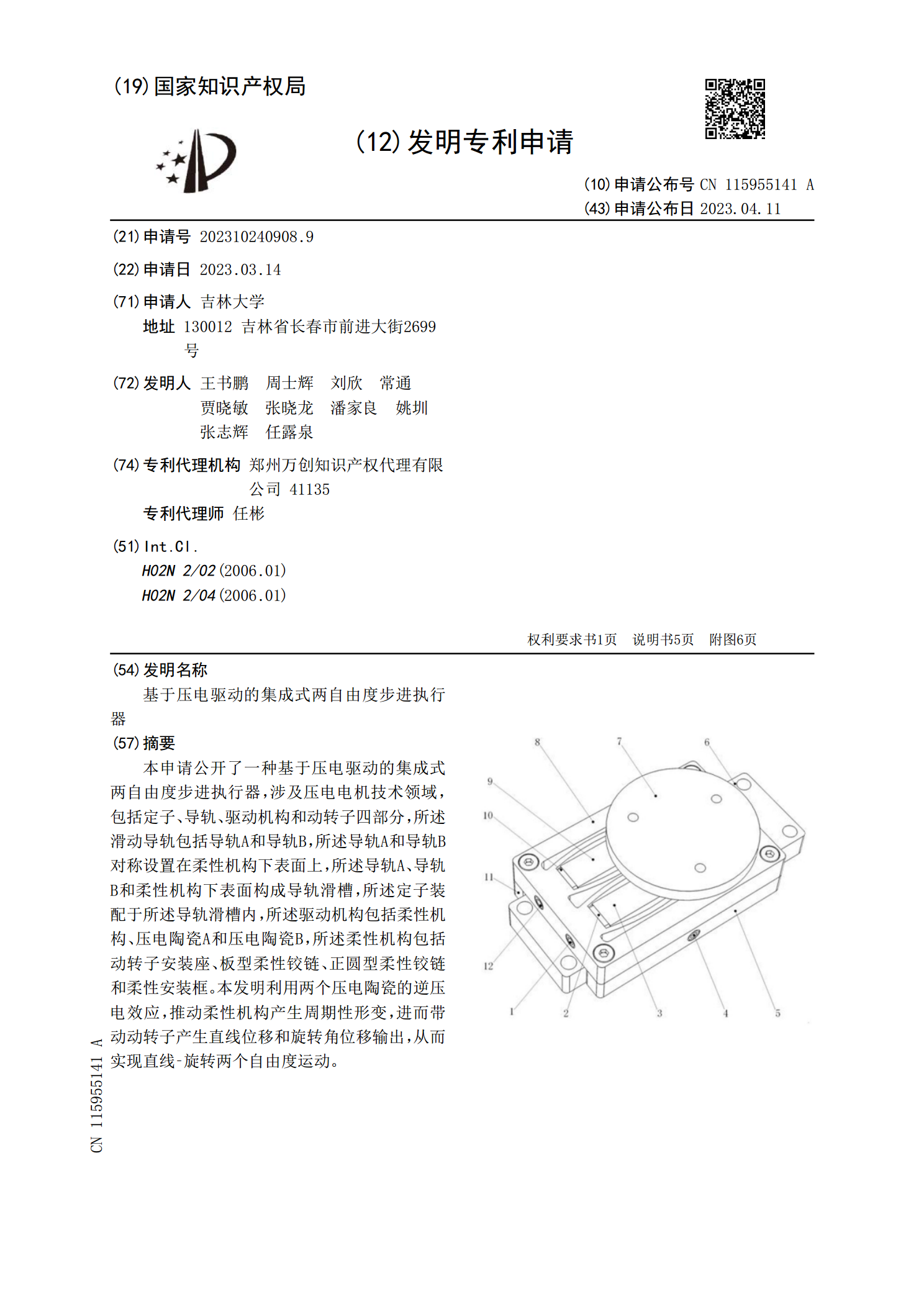
本申请公开了一种基于压电驱动的集成式两自由度步进执行器,涉及压电电机技术领域,包括定子、导轨、驱动机构和动转子四部分,所述滑动导轨包括导轨A和导轨B,所述导轨A和导轨B对称设置在柔性机构下表面上,所述导轨A、导轨B和柔性机构下表面构成导轨滑槽,所述定子装配于所述导轨滑槽内,所述驱动机构包括柔性机构、压电陶瓷A和压电陶瓷B,所述柔性机构包括动转子安装座、板型柔性铰链、正圆型柔性铰链和柔性安装框。本发明利用两个压电陶瓷的逆压电效应,推动柔性机构产生周期性形变,进而带动动转子产生直线位移和旋转角位移输出,从而实

压电惯性驱动器惯性冲击力的分析与检测.docx
压电惯性驱动器惯性冲击力的分析与检测压电惯性驱动器是现代机电一体化领域的重要组成部分,其在精密仪器制造、智能控制系统、卫星导航等诸多领域具有广泛的应用。然而,随着压电惯性驱动器使用的广泛,其性能指标的提高和稳定性的需求也日益增加。其中,惯性冲击力是影响压电惯性驱动器性能的重要因素之一。本文将着重分析和检测压电惯性驱动器惯性冲击力,旨在提高压电惯性驱动器的稳定性和性能指标。一、压电惯性驱动器的工作原理压电惯性驱动器是利用压电效应实现微小振动的一种机电一体化装置。其基本结构包括震荡结构和压电陶瓷片两部分。震荡