
一种欠驱动仿生手腕装置.pdf

一条****涛k

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种欠驱动仿生手腕装置.pdf
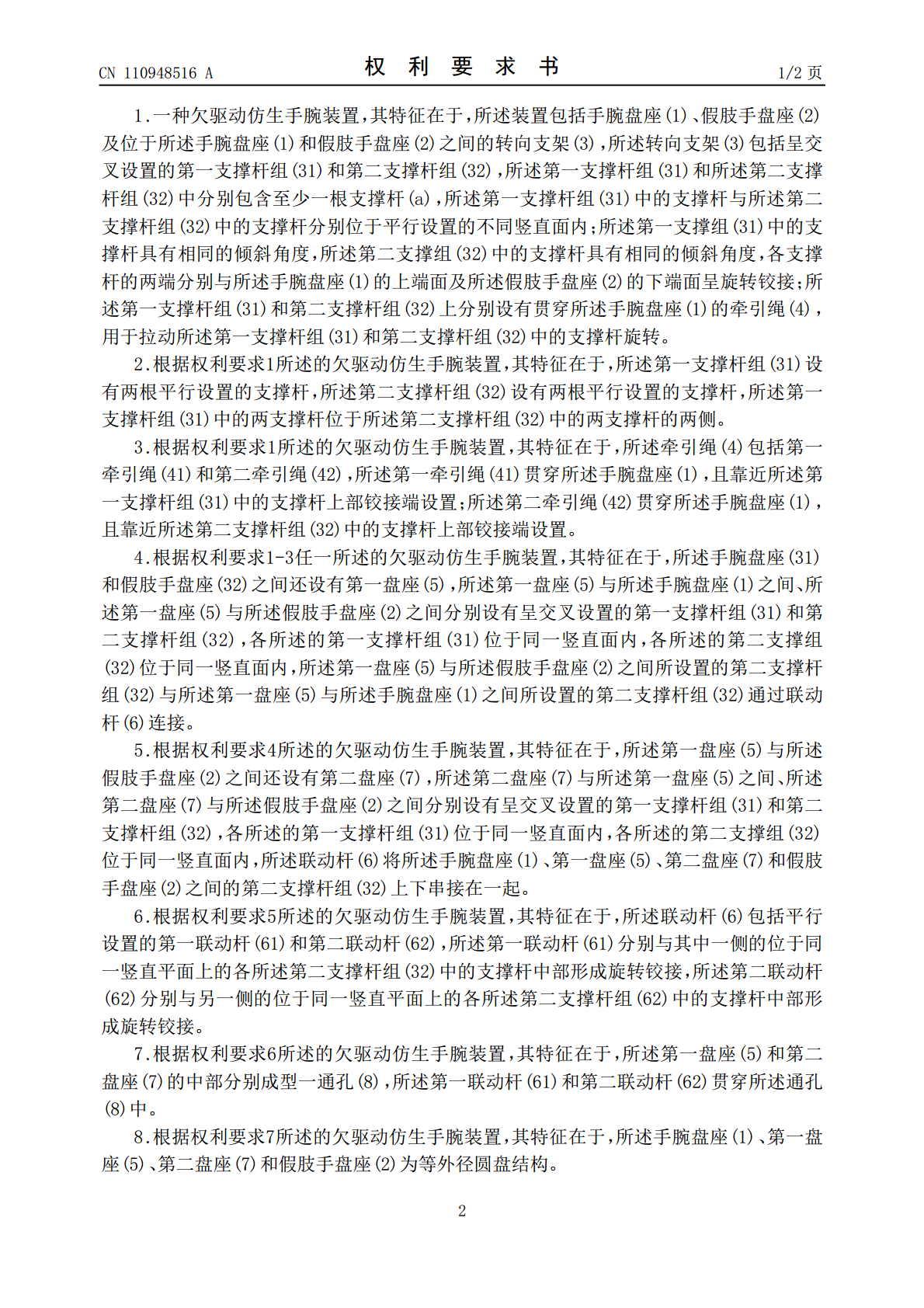
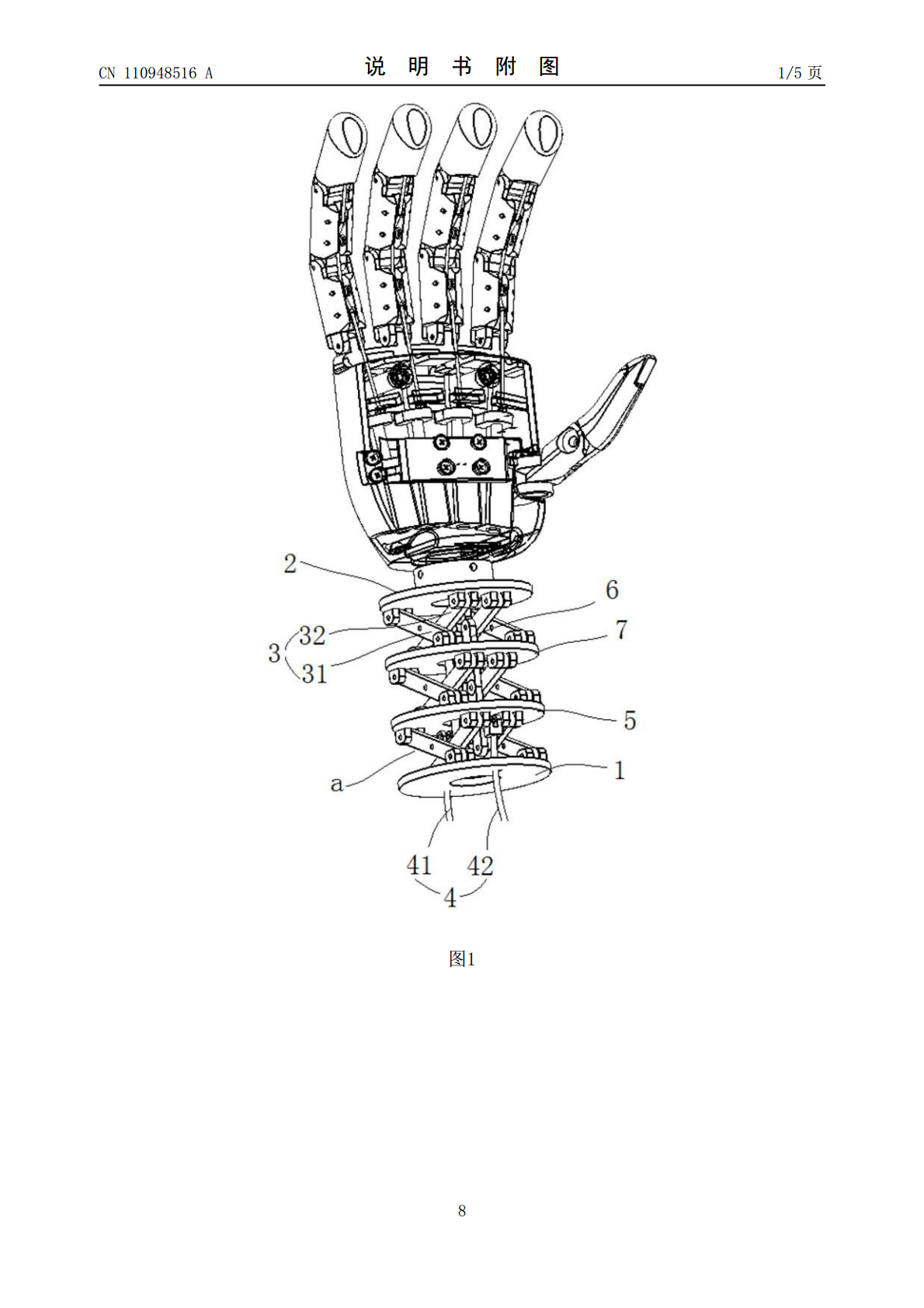
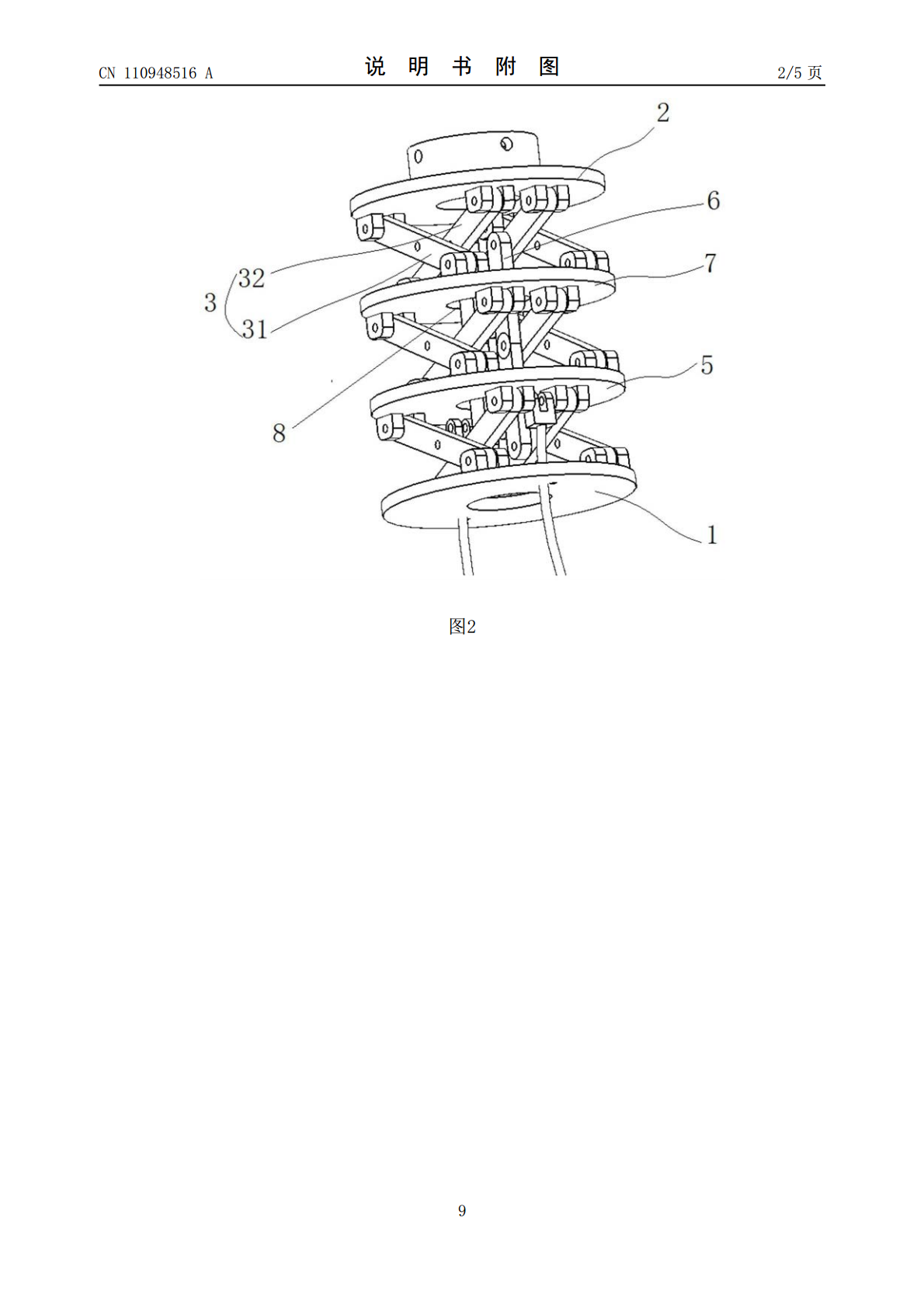
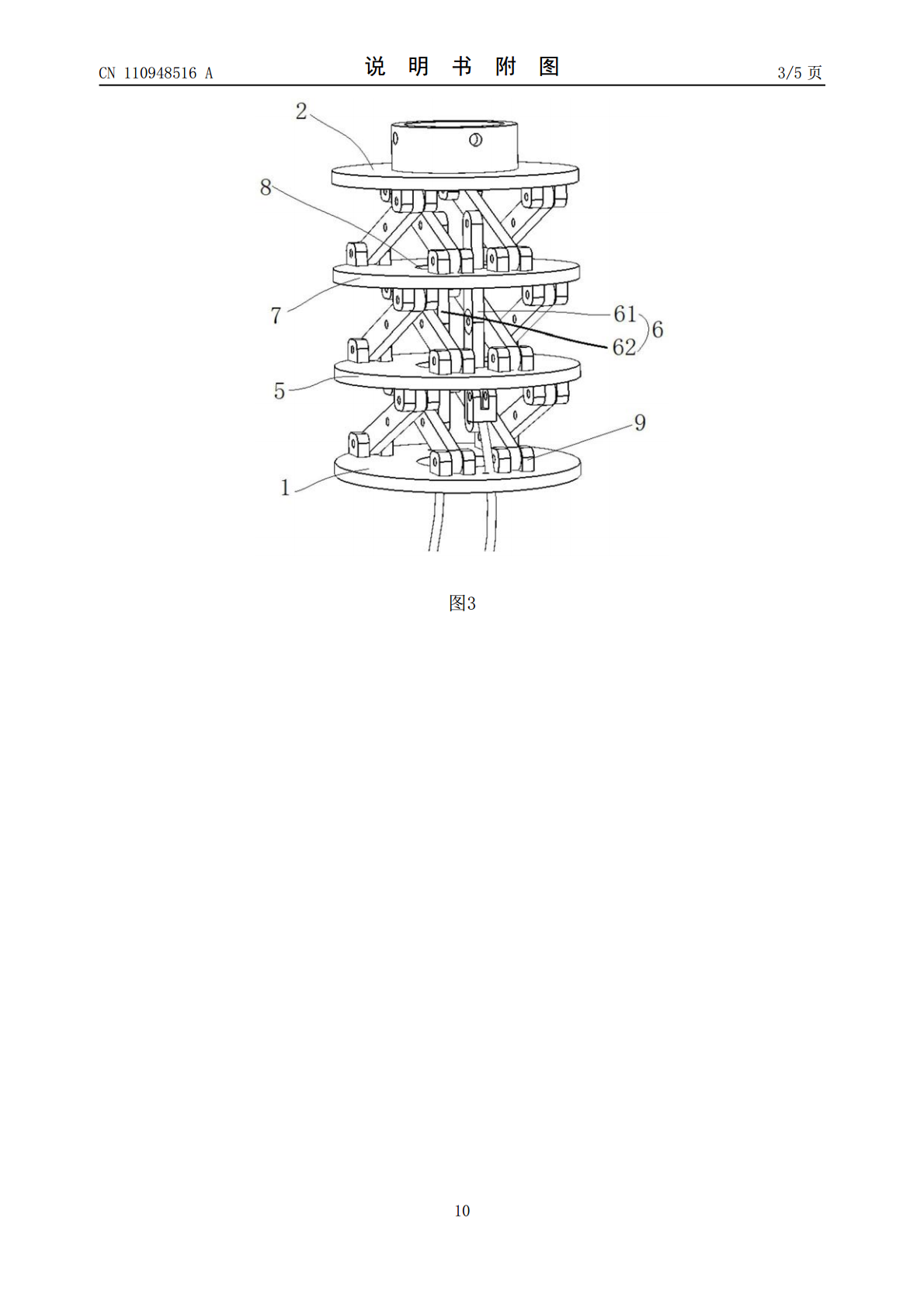
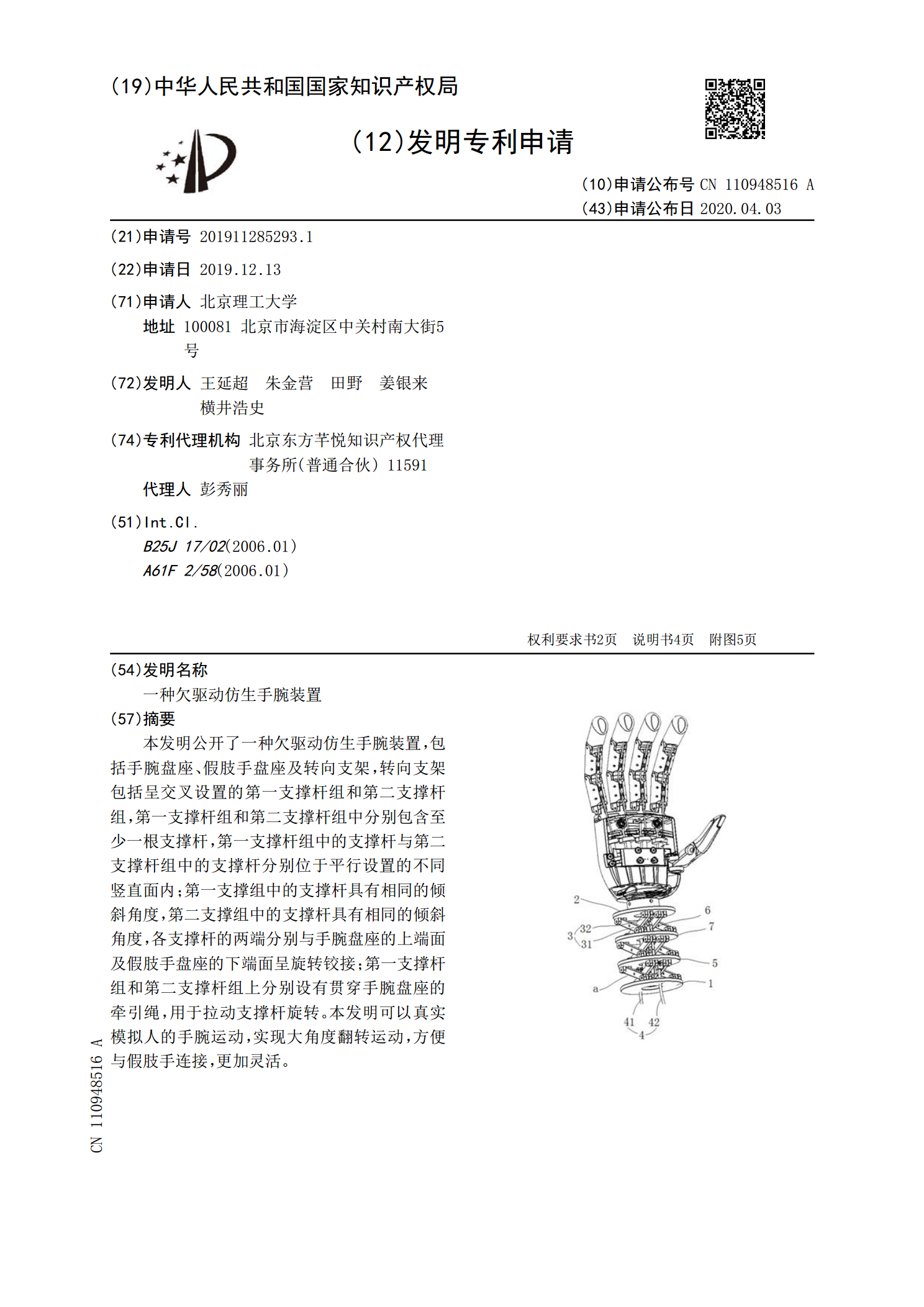
本发明公开了一种欠驱动仿生手腕装置,包括手腕盘座、假肢手盘座及转向支架,转向支架包括呈交叉设置的第一支撑杆组和第二支撑杆组,第一支撑杆组和第二支撑杆组中分别包含至少一根支撑杆,第一支撑杆组中的支撑杆与第二支撑杆组中的支撑杆分别位于平行设置的不同竖直面内;第一支撑组中的支撑杆具有相同的倾斜角度,第二支撑组中的支撑杆具有相同的倾斜角度,各支撑杆的两端分别与手腕盘座的上端面及假肢手盘座的下端面呈旋转铰接;第一支撑杆组和第二支撑杆组上分别设有贯穿手腕盘座的牵引绳,用于拉动支撑杆旋转。本发明可以真实模拟人的手腕运动
咽颌运动模式欠驱动柔性胸鳍仿生装置.pdf
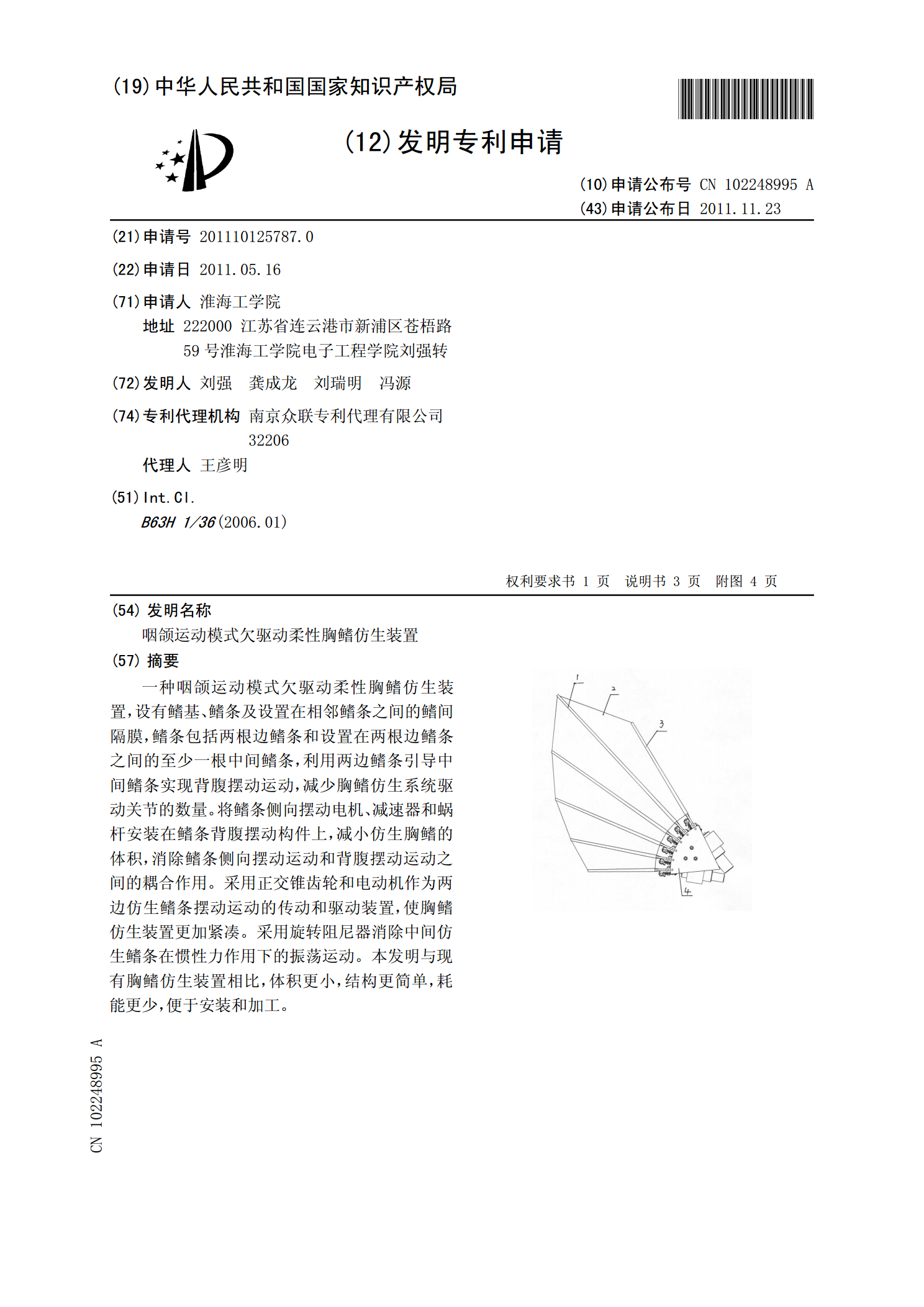
一种咽颌运动模式欠驱动柔性胸鳍仿生装置,设有鳍基、鳍条及设置在相邻鳍条之间的鳍间隔膜,鳍条包括两根边鳍条和设置在两根边鳍条之间的至少一根中间鳍条,利用两边鳍条引导中间鳍条实现背腹摆动运动,减少胸鳍仿生系统驱动关节的数量。将鳍条侧向摆动电机、减速器和蜗杆安装在鳍条背腹摆动构件上,减小仿生胸鳍的体积,消除鳍条侧向摆动运动和背腹摆动运动之间的耦合作用。采用正交锥齿轮和电动机作为两边仿生鳍条摆动运动的传动和驱动装置,使胸鳍仿生装置更加紧凑。采用旋转阻尼器消除中间仿生鳍条在惯性力作用下的振荡运动。本发明与现有胸鳍仿

一种单驱动源三自由度欠驱动机器人手腕装置.pdf
本发明公开了一种单驱动源三自由度欠驱动机器人手腕装置,包括:形成具有内部空间的箱体、末端连杆、旋转连杆、大拇指、固定导轮部件、第一绳索和第二绳索,末端连杆的一端通过旋转连杆与大拇指相连接,所述末端连杆的另一端与固定导轮部件、第一绳索和第二绳索之间固定连接,所述固定导轮部件、第一绳索和第二绳索在末端连杆上依次排列。通过上述方式,本发明能够提供一种单驱动源三自由度欠驱动机器人手腕装置,采用单一动力源驱动的绳子作为输入端,且经过一个欠驱动系统的传动,带动作为输出端的末端连杆作三自由度运动,运用此方式构成的机器人
一种基于齿轮传动的欠驱动机械臂手腕.pdf
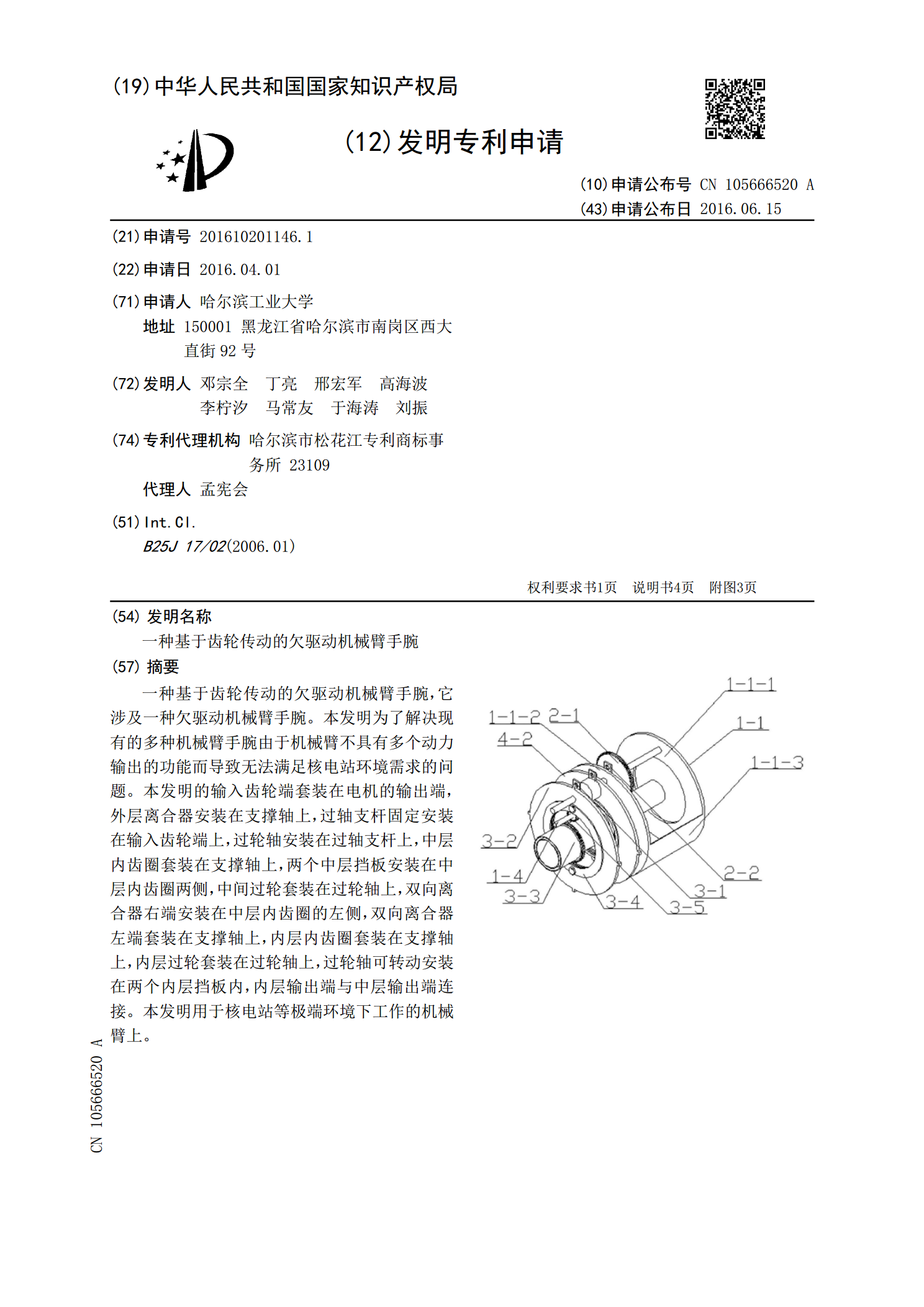
一种基于齿轮传动的欠驱动机械臂手腕,它涉及一种欠驱动机械臂手腕。本发明为了解决现有的多种机械臂手腕由于机械臂不具有多个动力输出的功能而导致无法满足核电站环境需求的问题。本发明的输入齿轮端套装在电机的输出端,外层离合器安装在支撑轴上,过轴支杆固定安装在输入齿轮端上,过轮轴安装在过轴支杆上,中层内齿圈套装在支撑轴上,两个中层挡板安装在中层内齿圈两侧,中间过轮套装在过轮轴上,双向离合器右端安装在中层内齿圈的左侧,双向离合器左端套装在支撑轴上,内层内齿圈套装在支撑轴上,内层过轮套装在过轮轴上,过轮轴可转动安装在两

一种单驱动源三自由度欠驱动机器人手腕固定装置.pdf
本发明公开了一种单驱动源三自由度欠驱动机器人手腕固定装置,包括:第一固定导轮部件、第二固定导轮部件、第三固定导轮部件、第四固定导轮部件、第五固定导轮部件、第一滑动导轮部件和第二滑动导轮部件,所述第一固定导轮部件与第五固定导轮部件之间设置有末端连杆。通过上述方式,本发明能够提供一种单驱动源三自由度欠驱动机器人手腕固定装置,采用单一动力源驱动的绳子作为输入端,且经过一个欠驱动系统的传动,带动作为输出端的末端连杆作三自由度运动,运用此方式构成的机器人动力源少,手腕的体积也比现有技术中的机器人手腕小,重量轻,且成