
一种单电机驱动的绳驱式欠驱动攀爬机器人.pdf

是立****92

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种单电机驱动的绳驱式欠驱动攀爬机器人.pdf
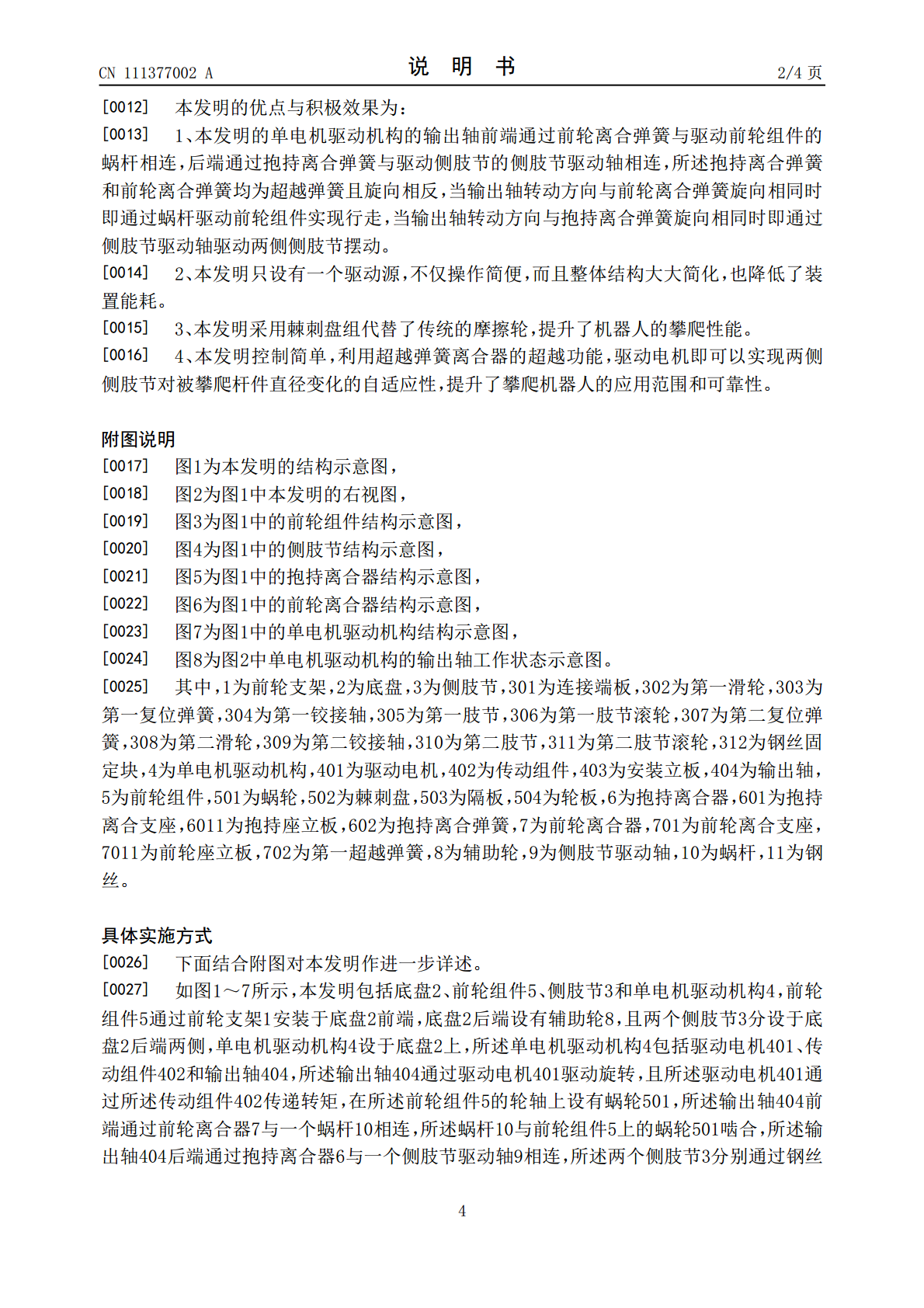
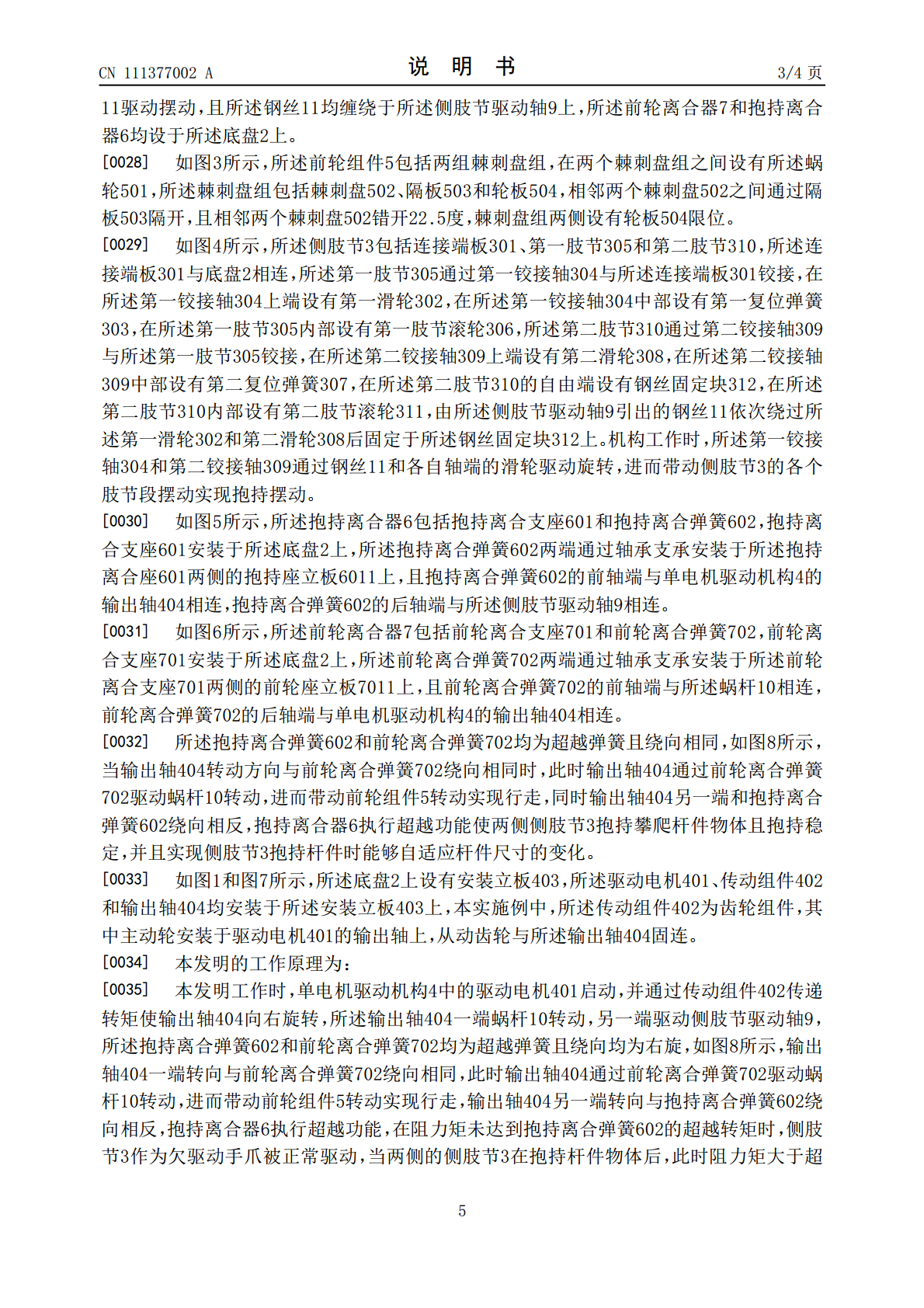
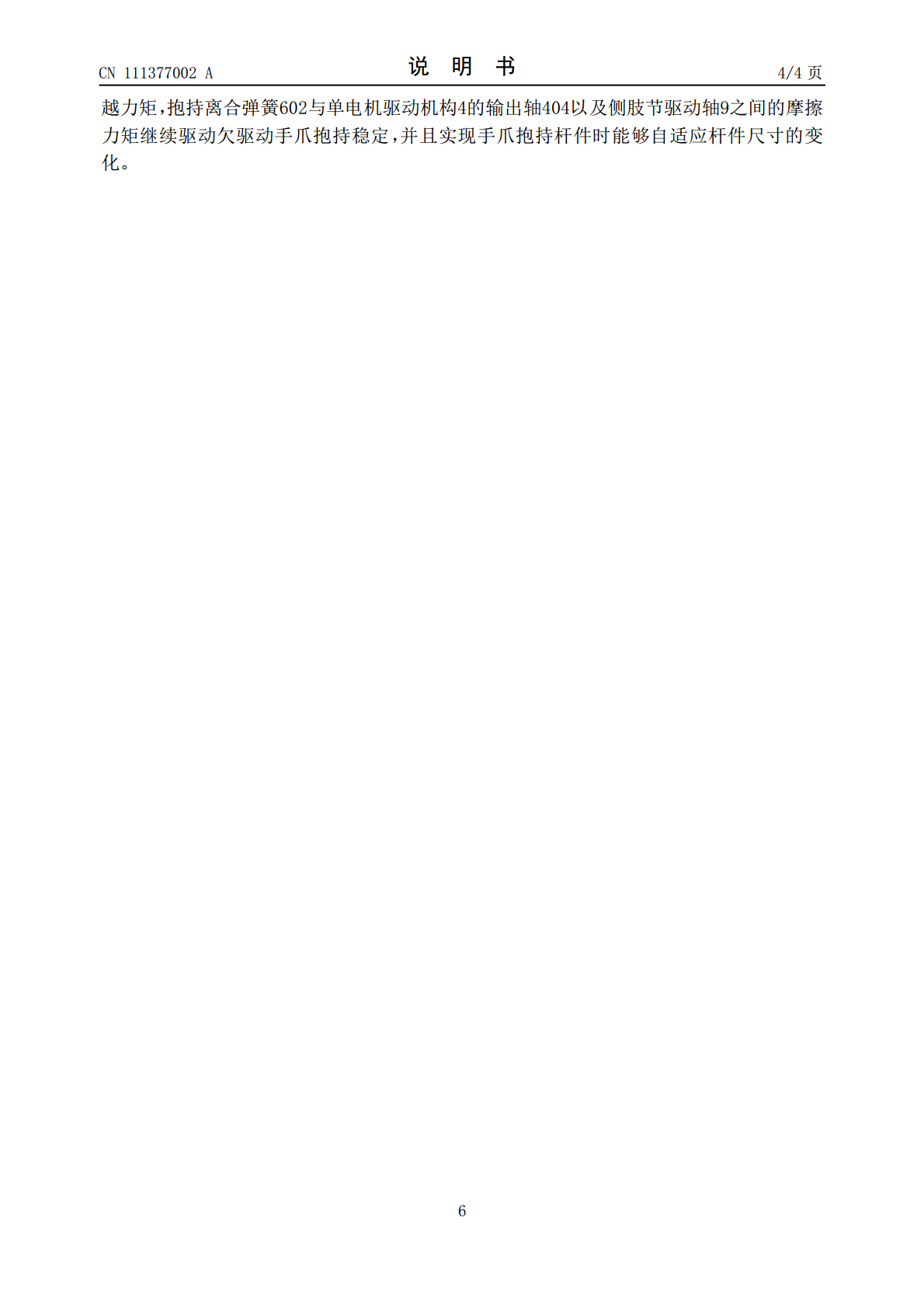
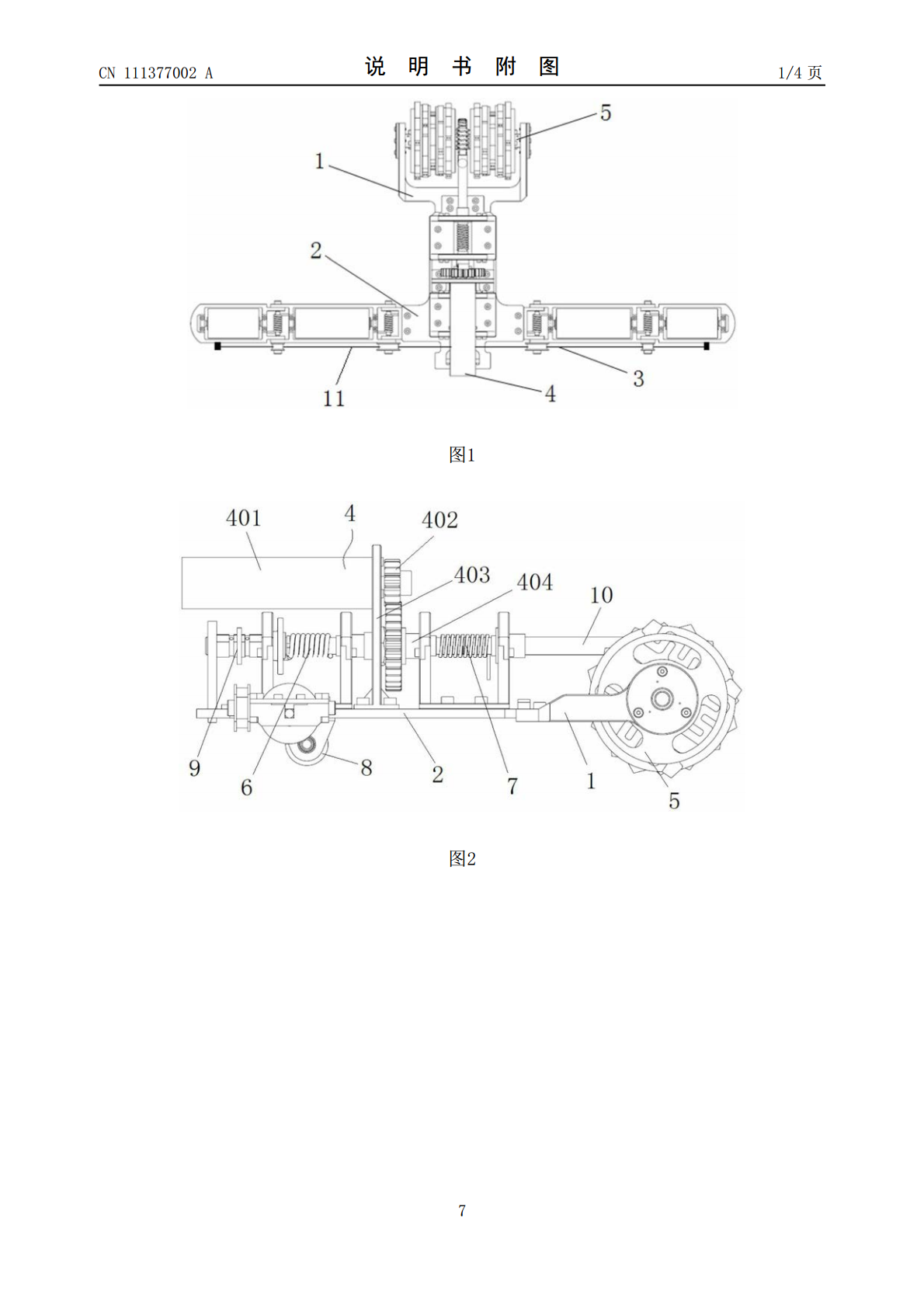
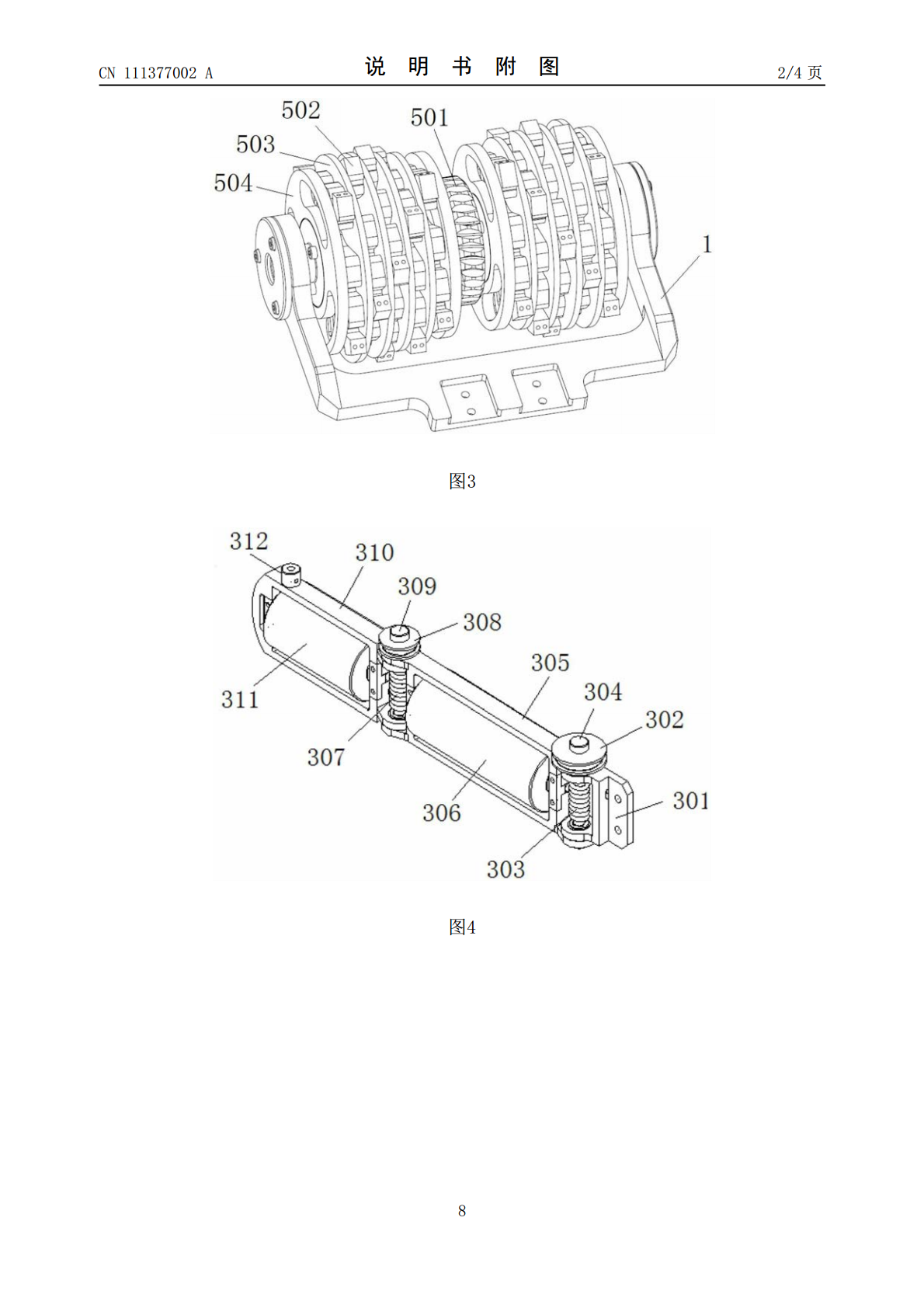
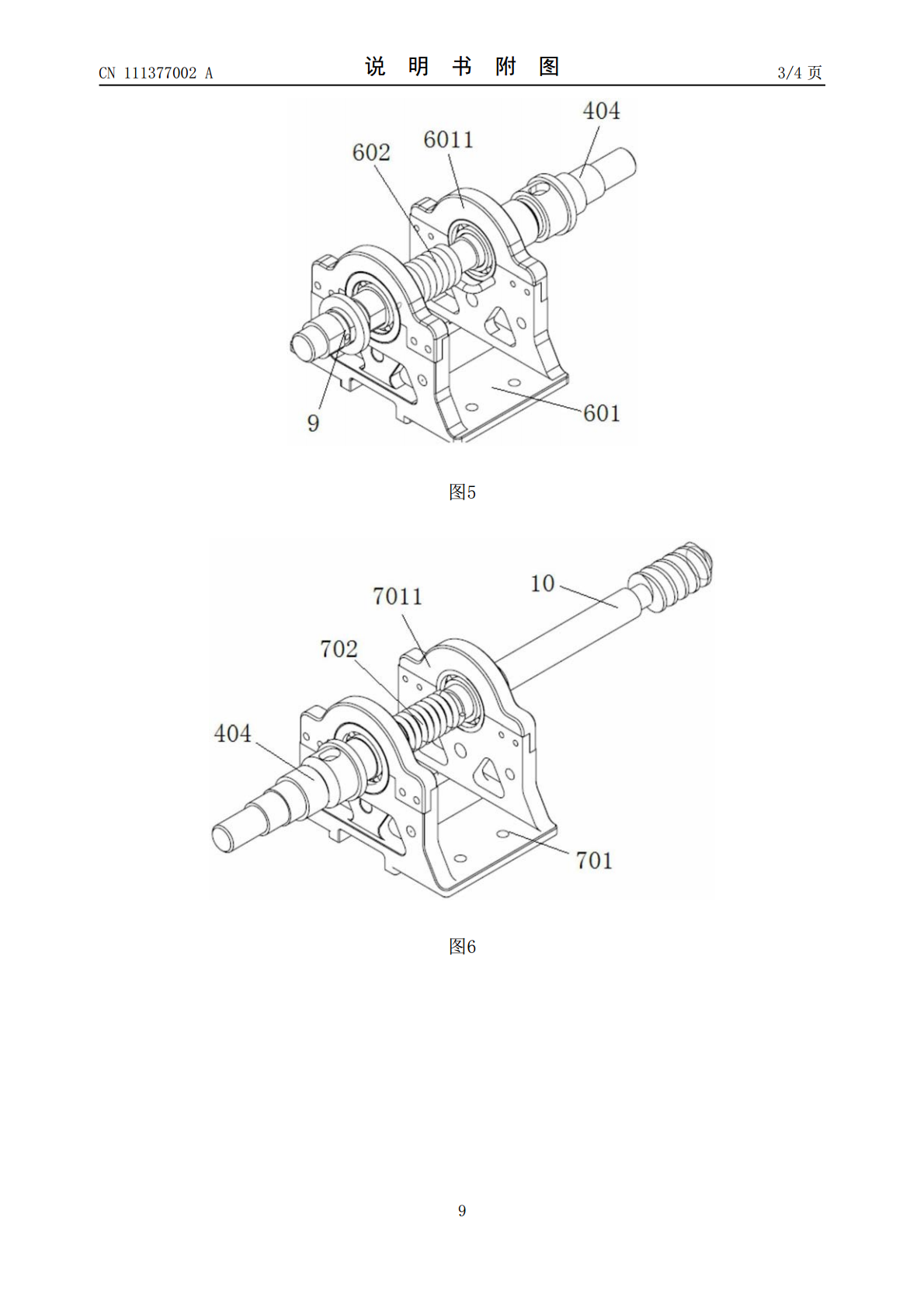
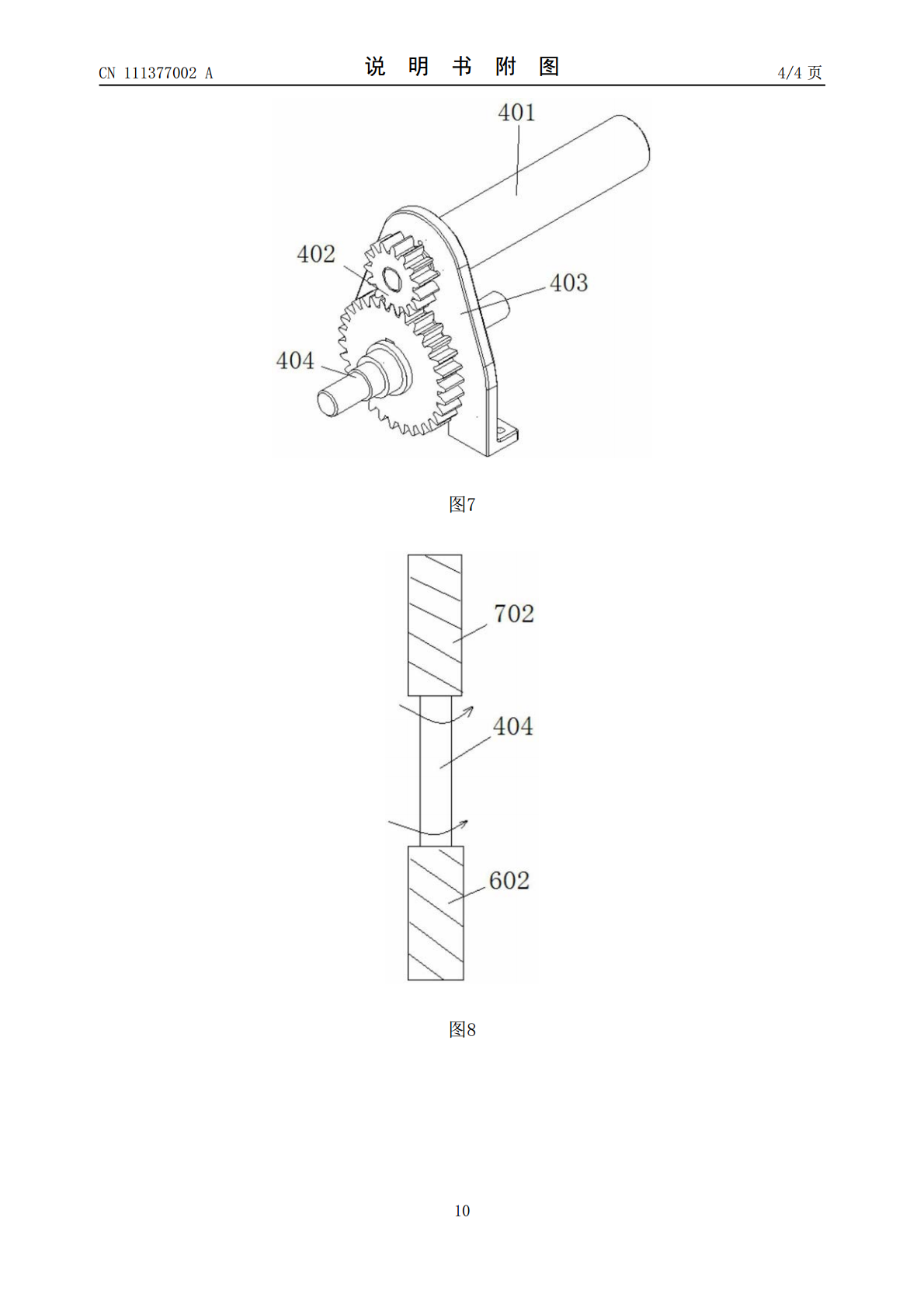
本发明涉及爬行机器人技术领域,具体地说是一种单电机驱动的绳驱式欠驱动攀爬机器人,其中前轮组件设于底盘前端,底盘后端设有辅助轮,侧肢节分设于底盘两侧,单电机驱动机构设于底盘上,且单电机驱动机构设有输出轴,所述输出轴前端通过前轮离合器与蜗杆相连,在前轮组件上设有蜗轮,且蜗杆与所述蜗轮啮合,输出轴后端通过抱持离合器与侧肢节驱动轴相连,侧肢节分别通过钢丝驱动,且所述钢丝缠绕于侧肢节驱动轴上,前轮离合器内设有前轮离合弹簧连接输出轴和蜗杆,抱持离合器内设有抱持离合弹簧连接输出轴和侧肢节驱动轴,所述前轮离合弹簧和抱持离

一种自适应绳驱式欠驱动三指机械手.pdf
本发明为一种自适应绳驱式欠驱动三指机械手,包括手掌、手指组件、机械手腕,所述手指组件由结构相同的1个第一固定手指和2个第二转动手指组成,所述第一固定手指的底部固定在所述手掌上,所述第二转动手指与固定在所述手掌中心、并能使所述第二转动手指沿手掌中轴线水平转动的齿轮转动机构相连。本发明性能稳定可靠、结构紧凑、实用、灵活,可与工业机器人进行高效配合,提高工业生产的自动化程度。

一种绳驱欠驱动抓取机构参数设计方法.pdf
本发明公开了一种绳驱欠驱动抓取机构参数设计方法,对绳驱欠驱动抓取机构中的关节滑轮半径、关节扭簧刚度系数、初始扭矩以及绳索驱动力的变化形式提出了解析形式的详细设计方法,本发明避免直接仿真或试验等经验设计方法的重复修正,大大提高欠驱动系统的运动和控制精度。
一种绳驱式欠驱动球形水果采摘末端执行器装置.pdf
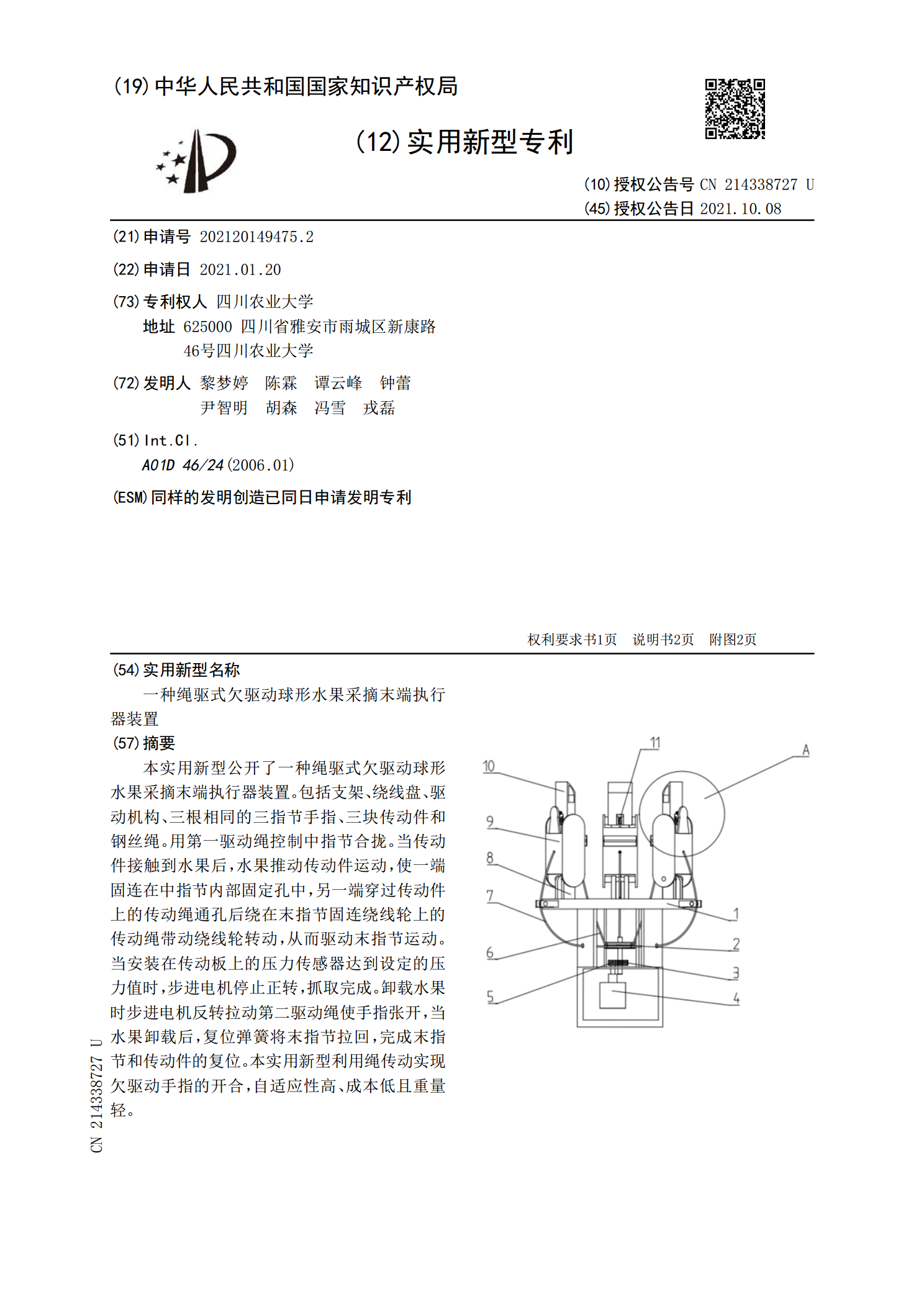
本实用新型公开了一种绳驱式欠驱动球形水果采摘末端执行器装置。包括支架、绕线盘、驱动机构、三根相同的三指节手指、三块传动件和钢丝绳。用第一驱动绳控制中指节合拢。当传动件接触到水果后,水果推动传动件运动,使一端固连在中指节内部固定孔中,另一端穿过传动件上的传动绳通孔后绕在末指节固连绕线轮上的传动绳带动绕线轮转动,从而驱动末指节运动。当安装在传动板上的压力传感器达到设定的压力值时,步进电机停止正转,抓取完成。卸载水果时步进电机反转拉动第二驱动绳使手指张开,当水果卸载后,复位弹簧将末指节拉回,完成末指节和传动件的
一种基于超越离合机理的欠驱动攀爬机器人.pdf
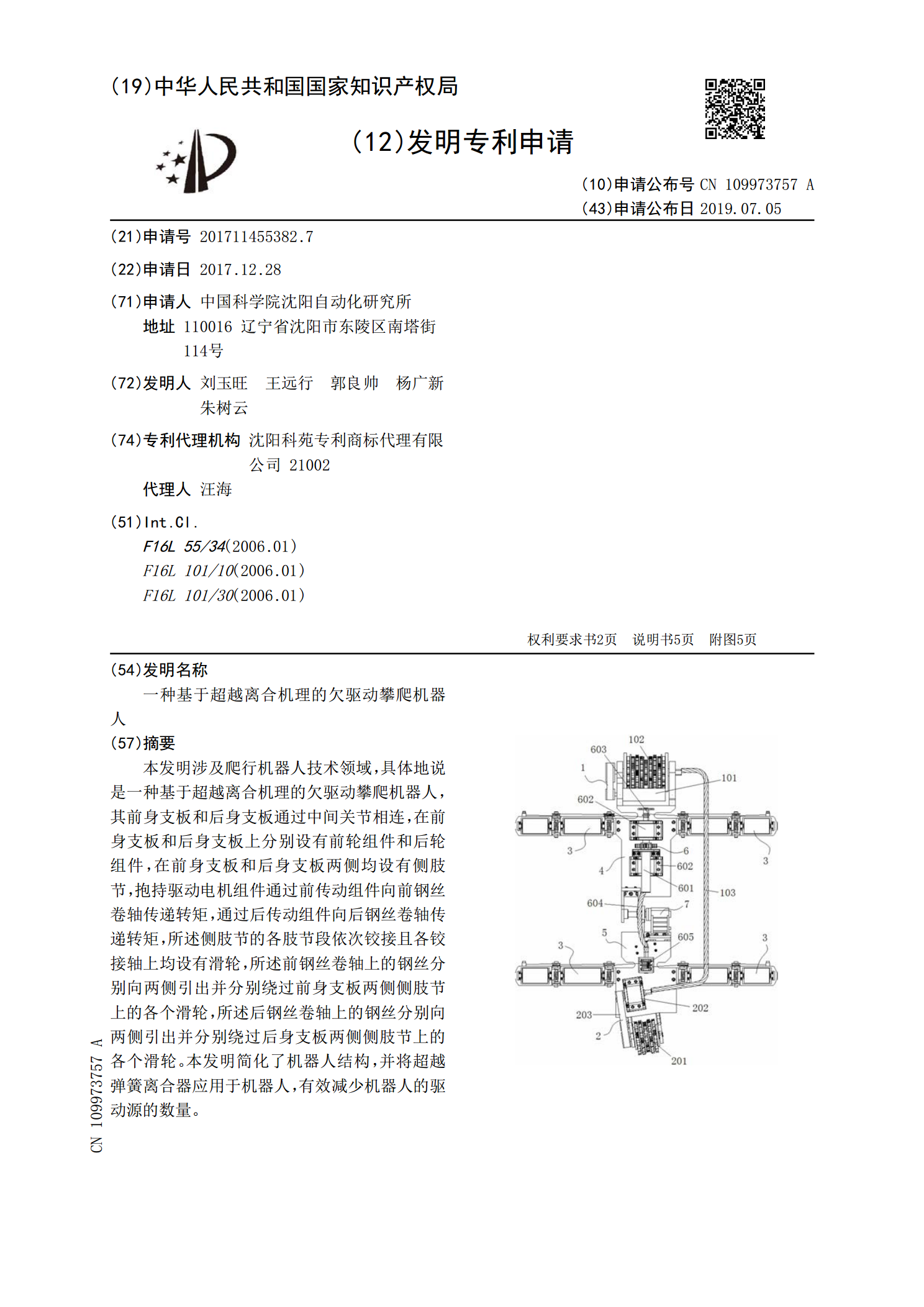
本发明涉及爬行机器人技术领域,具体地说是一种基于超越离合机理的欠驱动攀爬机器人,其前身支板和后身支板通过中间关节相连,在前身支板和后身支板上分别设有前轮组件和后轮组件,在前身支板和后身支板两侧均设有侧肢节,抱持驱动电机组件通过前传动组件向前钢丝卷轴传递转矩,通过后传动组件向后钢丝卷轴传递转矩,所述侧肢节的各肢节段依次铰接且各铰接轴上均设有滑轮,所述前钢丝卷轴上的钢丝分别向两侧引出并分别绕过前身支板两侧侧肢节上的各个滑轮,所述后钢丝卷轴上的钢丝分别向两侧引出并分别绕过后身支板两侧侧肢节上的各个滑轮。本发明简