
一种高空姿态稳定四旋翼无人机.pdf

书生****12


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高空姿态稳定四旋翼无人机.pdf
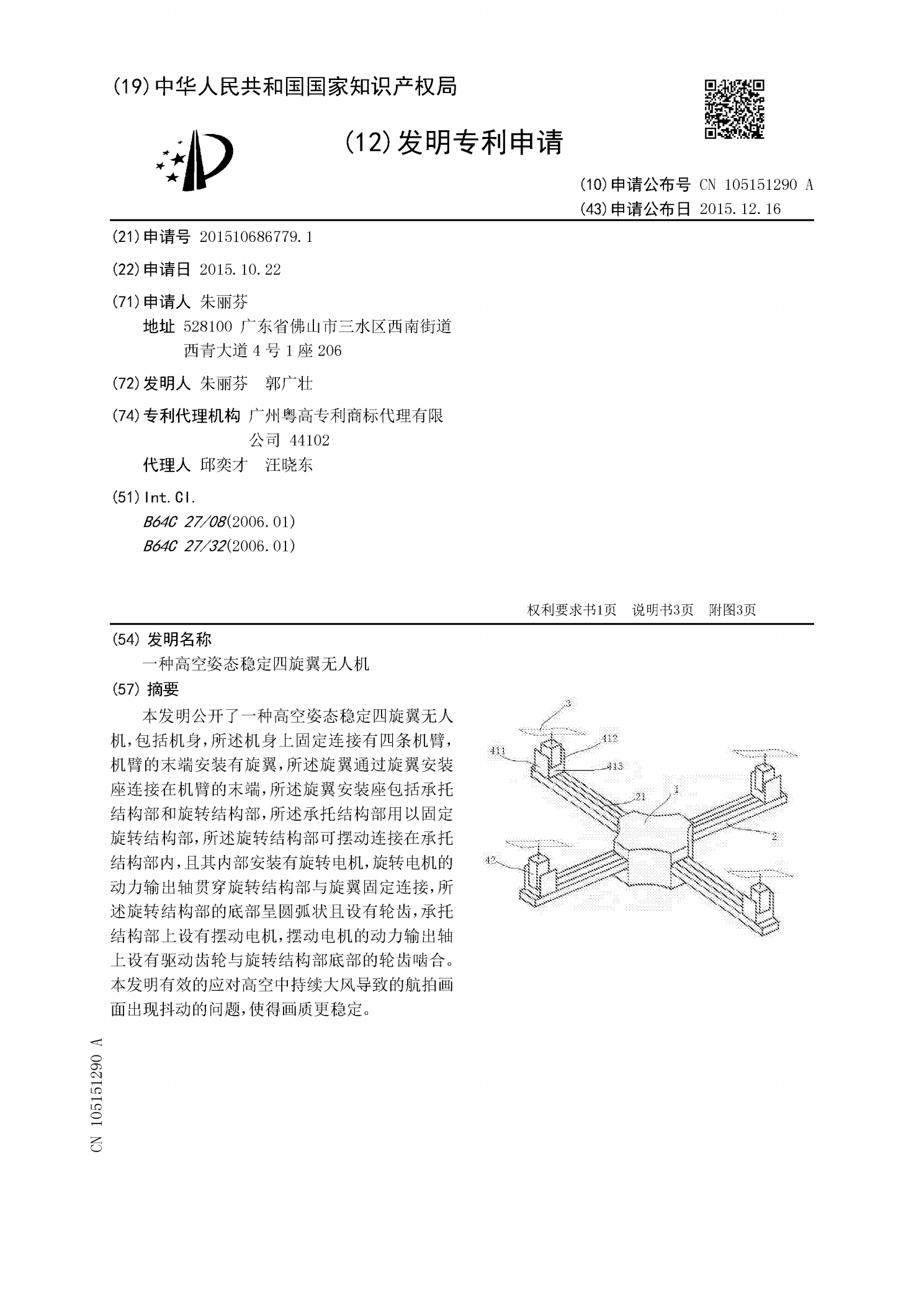
本发明公开了一种高空姿态稳定四旋翼无人机,包括机身,所述机身上固定连接有四条机臂,机臂的末端安装有旋翼,所述旋翼通过旋翼安装座连接在机臂的末端,所述旋翼安装座包括承托结构部和旋转结构部,所述承托结构部用以固定旋转结构部,所述旋转结构部可摆动连接在承托结构部内,且其内部安装有旋转电机,旋转电机的动力输出轴贯穿旋转结构部与旋翼固定连接,所述旋转结构部的底部呈圆弧状且设有轮齿,承托结构部上设有摆动电机,摆动电机的动力输出轴上设有驱动齿轮与旋转结构部底部的轮齿啮合。本发明有效的应对高空中持续大风导致的航拍画面出现

一种用于旋翼无人机姿态模拟系统及方法.pdf
本发明属于无人机仿真/测试装置技术领域,公开了一种用于旋翼无人机姿态模拟系统及方法;设置有:回转内环;回转内环通过螺栓与支撑装置连接,回转内环位于回转外环内部,回转内环与回转外环组成类似轴承的结构,可以相对转动;回转外环通过螺栓与转动装置底座通过螺钉连接,V型滑轮通过固定螺钉固定在转动装置底座,导轨座上下两侧均固定有V型滑轮,用于夹持导轨座。本发明可以实现旋翼无人机三个旋转自由度的模拟,且三个自由度的转动中心相重合,即实现无人机的偏航、俯仰、翻转三种飞行姿态的模拟。三个旋转自由度的运动模拟通过三个转动装置
一种多传感融合的四旋翼无人机姿态估计方法.pdf
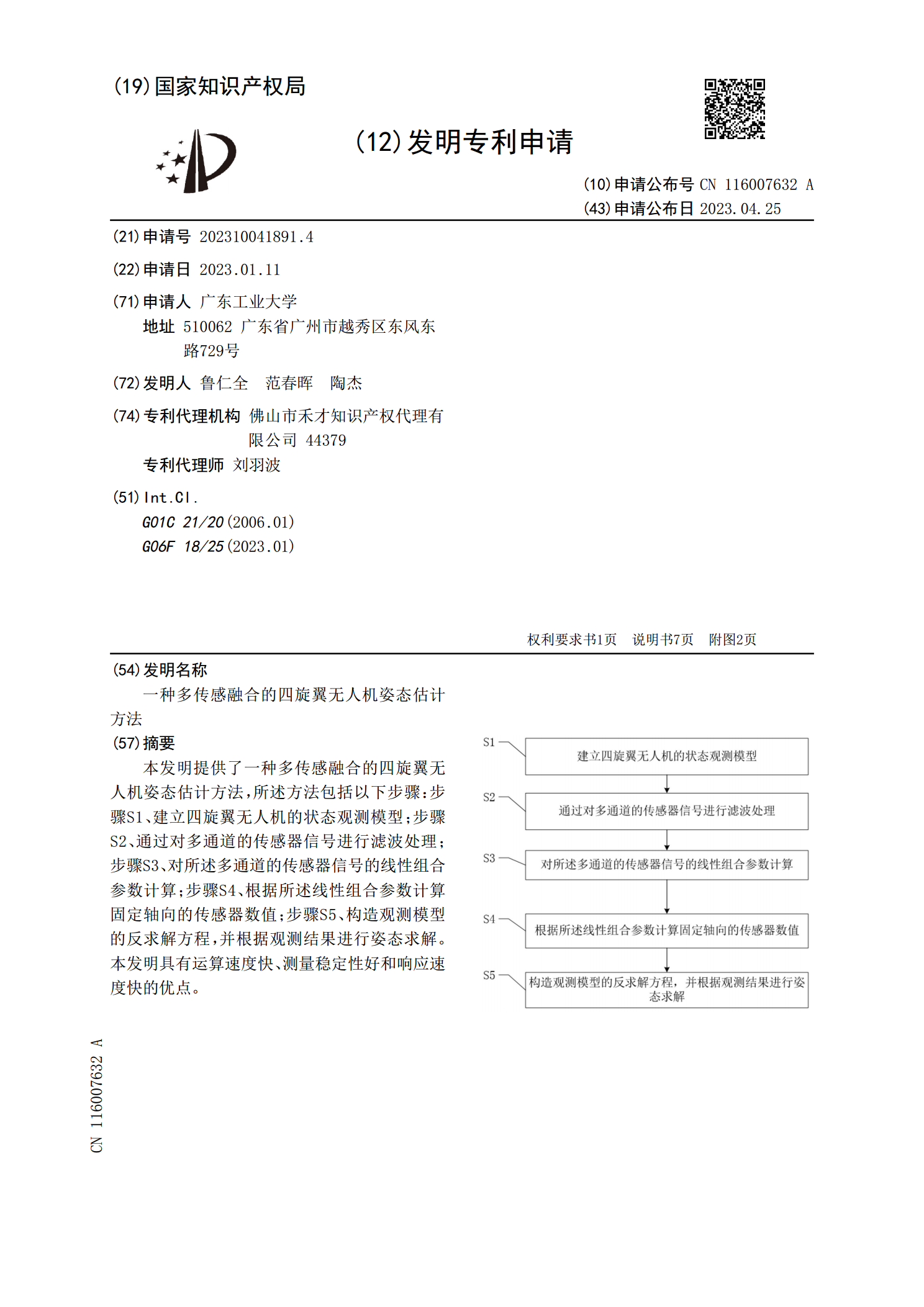
本发明提供了一种多传感融合的四旋翼无人机姿态估计方法,所述方法包括以下步骤:步骤S1、建立四旋翼无人机的状态观测模型;步骤S2、通过对多通道的传感器信号进行滤波处理;步骤S3、对所述多通道的传感器信号的线性组合参数计算;步骤S4、根据所述线性组合参数计算固定轴向的传感器数值;步骤S5、构造观测模型的反求解方程,并根据观测结果进行姿态求解。本发明具有运算速度快、测量稳定性好和响应速度快的优点。

一种无人机旋翼、旋翼的组装方法和旋翼式无人机.pdf
本发明涉及一种无人机旋翼和旋翼式无人机,无人机机身上开设安装槽,安装槽的上方固定连接槽盖,槽盖上方设置有桨叶,安装槽内部设置有内齿环、外齿盘和电机,内齿环固定于安装槽的内底壁,内齿环的内表面啮合有外齿盘,外齿盘的上表面固定有电机,电机的输出端向上连接旋转轴,槽盖中心位置开设中心孔,桨叶具有向下的连接轴,连接轴下端穿过中心孔,连接轴下端内部开设有连接槽,旋转轴插入连接槽中,连接轴上部和旋转轴内部开设大小相同的内螺纹槽,高强度螺栓由上至下穿过连接轴和旋转轴,上端以螺母锁定。本发明较好地解决了无人机机身和旋翼之

一种四旋翼无人机姿态自适应扰动实时补偿控制方法.pdf
本发明公开了一种四旋翼无人机姿态自适应扰动实时补偿控制方法,包括以下步骤:1)建立考虑系统总和扰动的四旋翼无人机姿态控制系统模型;2)设计四旋翼无人机姿态跟踪自适应线性扩张状态观测器;3)设计四旋翼无人机姿态跟踪滑模控制律;4)四旋翼无人机系统稳定性分析。发明所设计的自适应线性扩张状态观测器可依据扰动量大小的变化自动修正观测器增益参数,从而可以使得观测器的估计误差始终保持在一个较高的精度内。