
一种四旋翼无人机姿态自适应扰动实时补偿控制方法.pdf

努力****振宇

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种四旋翼无人机姿态自适应扰动实时补偿控制方法.pdf
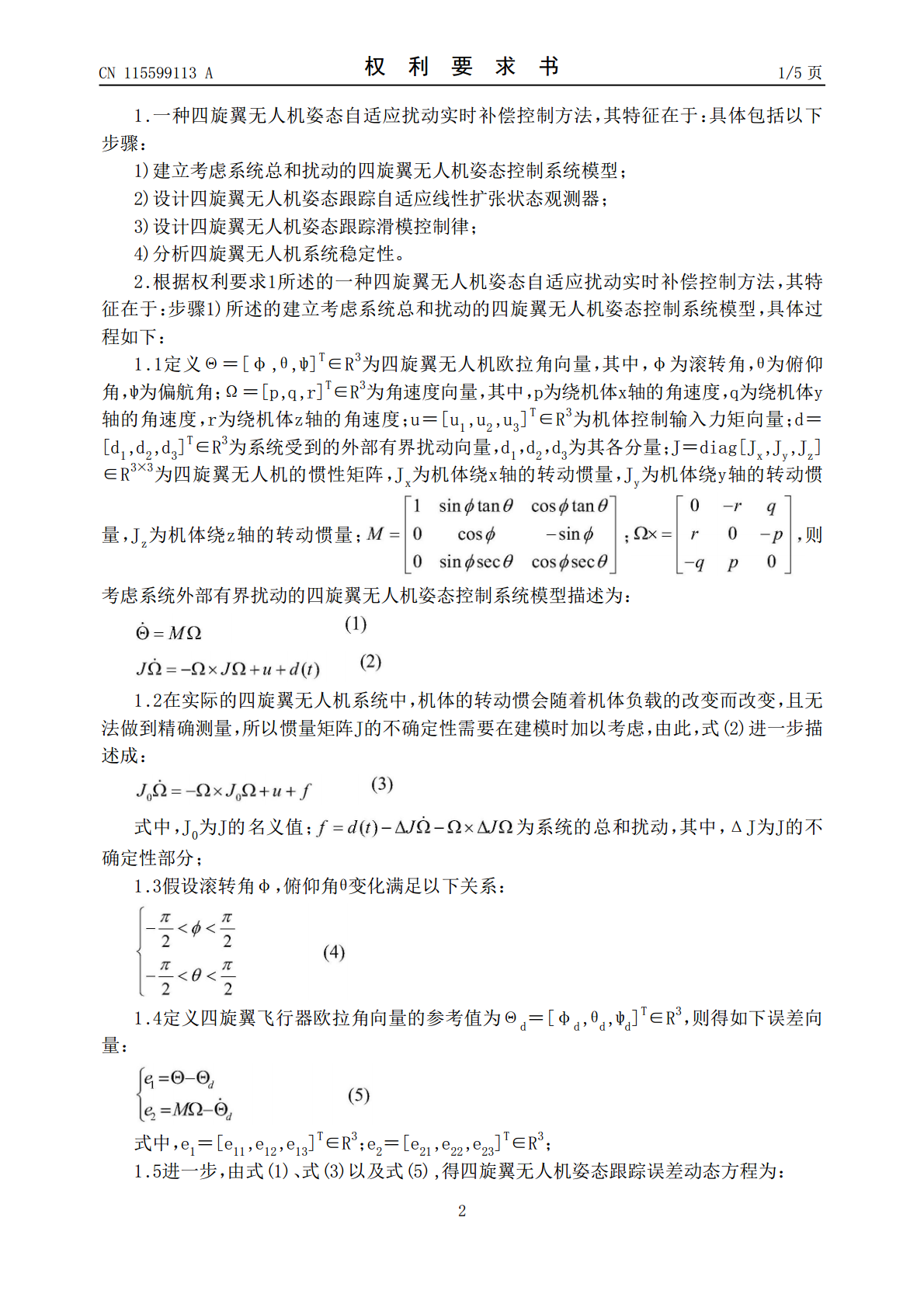
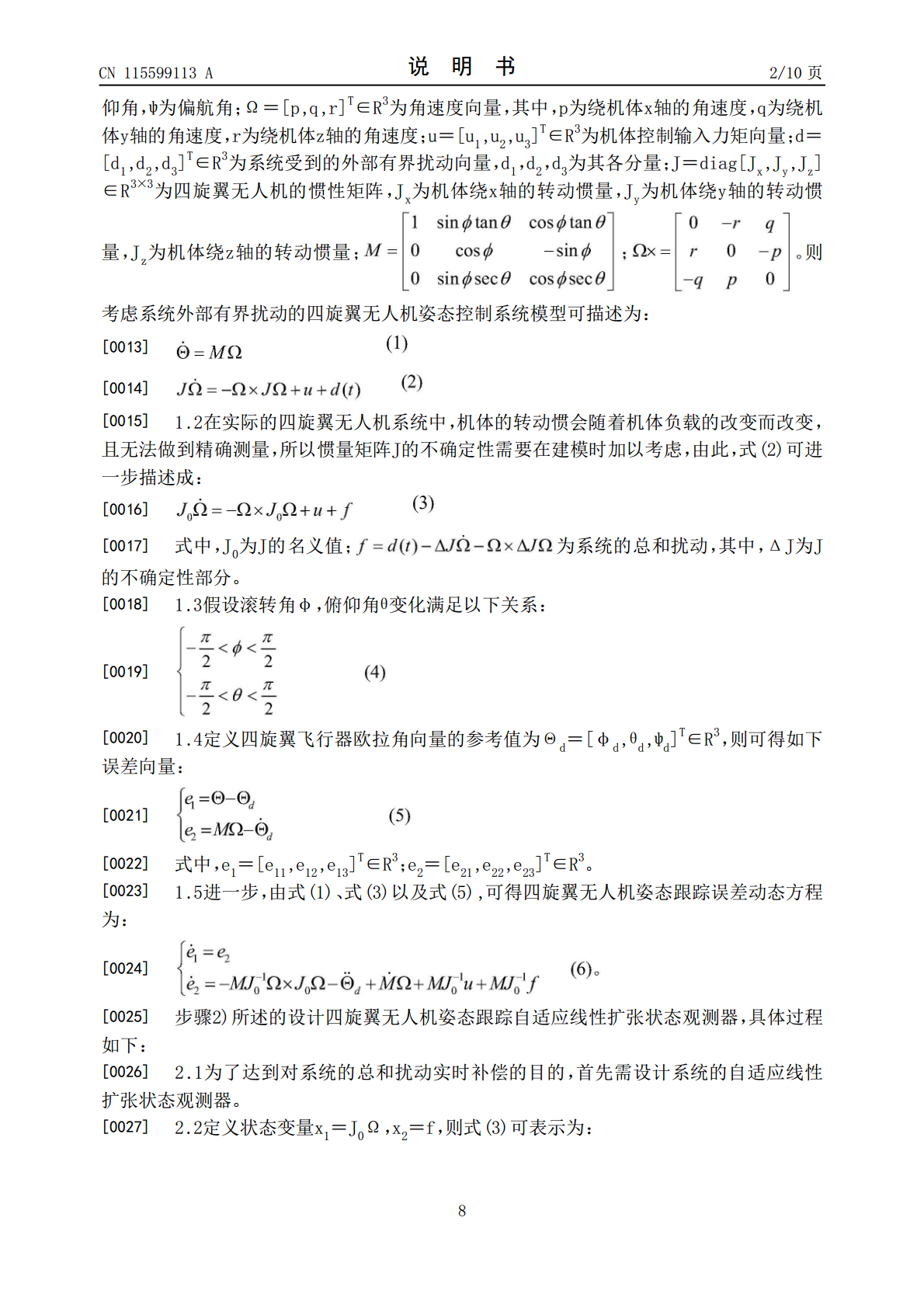
本发明公开了一种四旋翼无人机姿态自适应扰动实时补偿控制方法,包括以下步骤:1)建立考虑系统总和扰动的四旋翼无人机姿态控制系统模型;2)设计四旋翼无人机姿态跟踪自适应线性扩张状态观测器;3)设计四旋翼无人机姿态跟踪滑模控制律;4)四旋翼无人机系统稳定性分析。发明所设计的自适应线性扩张状态观测器可依据扰动量大小的变化自动修正观测器增益参数,从而可以使得观测器的估计误差始终保持在一个较高的精度内。

四旋翼无人机姿态控制分析及其研究.pptx
汇报人:CONTENTSPARTONEPARTTWO四旋翼无人机的结构特点四旋翼无人机的工作原理四旋翼无人机的应用场景PARTTHREE姿态控制系统的组成姿态控制系统的基本原理姿态控制系统的性能指标PARTFOUR姿态控制系统硬件设计姿态控制系统软件设计姿态控制系统算法设计PARTFIVE实验条件与实验方法实验结果与分析姿态控制性能评估与优化PARTSIX当前研究的不足与局限性未来研究的发展方向与重点对实际应用的展望与建议汇报人:
一种高空姿态稳定四旋翼无人机.pdf
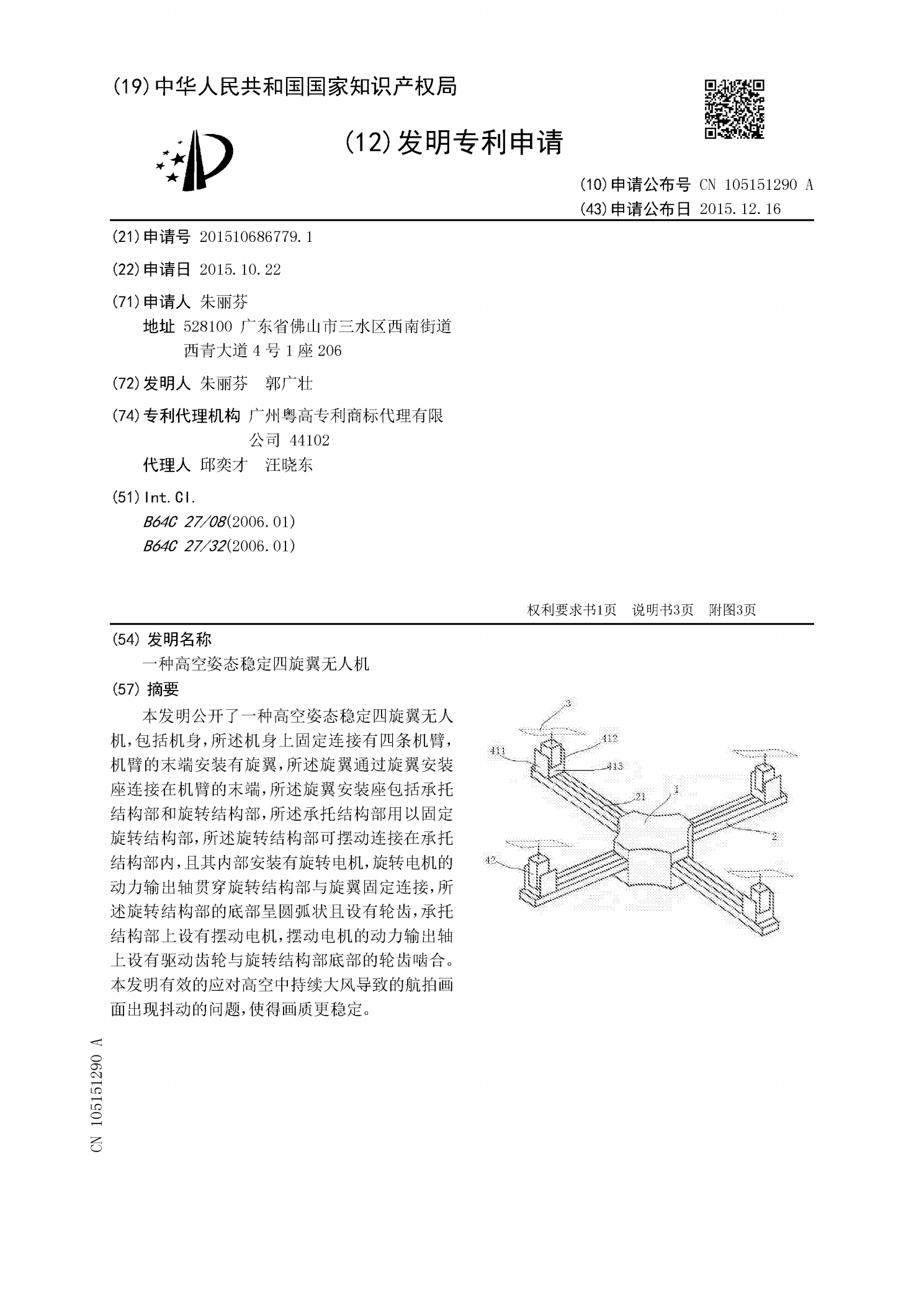
本发明公开了一种高空姿态稳定四旋翼无人机,包括机身,所述机身上固定连接有四条机臂,机臂的末端安装有旋翼,所述旋翼通过旋翼安装座连接在机臂的末端,所述旋翼安装座包括承托结构部和旋转结构部,所述承托结构部用以固定旋转结构部,所述旋转结构部可摆动连接在承托结构部内,且其内部安装有旋转电机,旋转电机的动力输出轴贯穿旋转结构部与旋翼固定连接,所述旋转结构部的底部呈圆弧状且设有轮齿,承托结构部上设有摆动电机,摆动电机的动力输出轴上设有驱动齿轮与旋转结构部底部的轮齿啮合。本发明有效的应对高空中持续大风导致的航拍画面出现
共轴双旋翼无人机的喷气式姿态控制装置及姿态控制方法.pdf
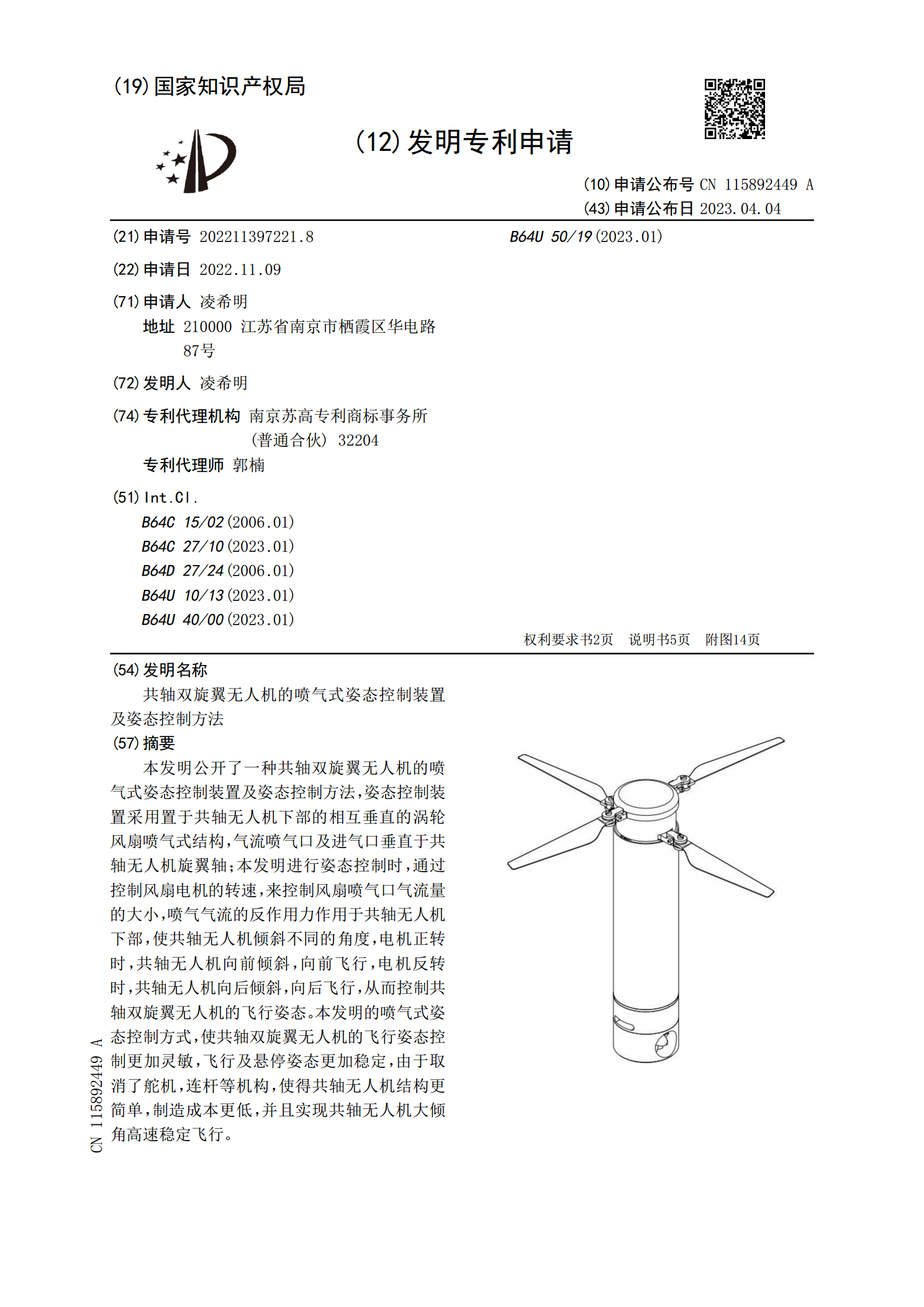
本发明公开了一种共轴双旋翼无人机的喷气式姿态控制装置及姿态控制方法,姿态控制装置采用置于共轴无人机下部的相互垂直的涡轮风扇喷气式结构,气流喷气口及进气口垂直于共轴无人机旋翼轴;本发明进行姿态控制时,通过控制风扇电机的转速,来控制风扇喷气口气流量的大小,喷气气流的反作用力作用于共轴无人机下部,使共轴无人机倾斜不同的角度,电机正转时,共轴无人机向前倾斜,向前飞行,电机反转时,共轴无人机向后倾斜,向后飞行,从而控制共轴双旋翼无人机的飞行姿态。本发明的喷气式姿态控制方式,使共轴双旋翼无人机的飞行姿态控制更加灵敏,
一种多传感融合的四旋翼无人机姿态估计方法.pdf
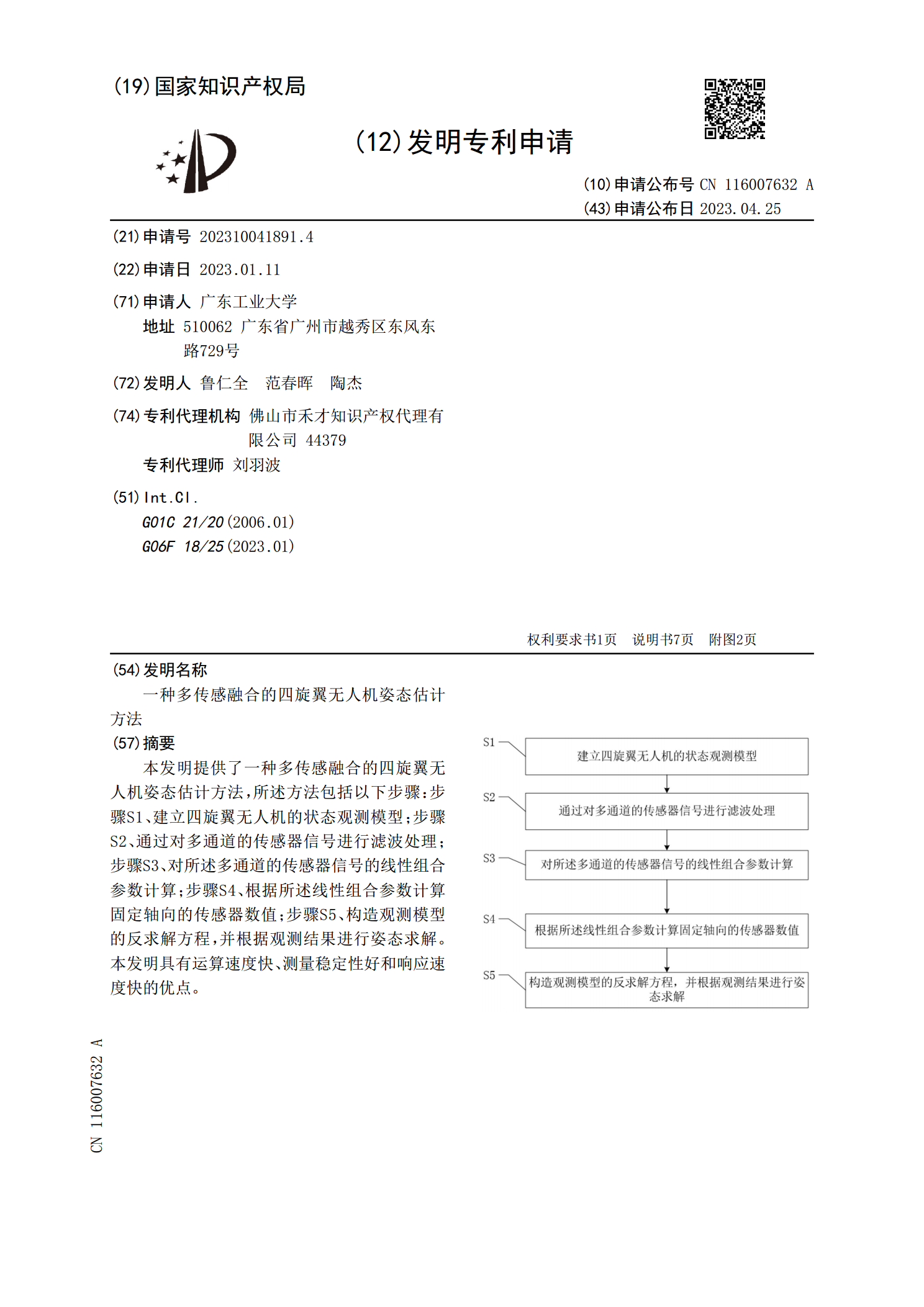
本发明提供了一种多传感融合的四旋翼无人机姿态估计方法,所述方法包括以下步骤:步骤S1、建立四旋翼无人机的状态观测模型;步骤S2、通过对多通道的传感器信号进行滤波处理;步骤S3、对所述多通道的传感器信号的线性组合参数计算;步骤S4、根据所述线性组合参数计算固定轴向的传感器数值;步骤S5、构造观测模型的反求解方程,并根据观测结果进行姿态求解。本发明具有运算速度快、测量稳定性好和响应速度快的优点。