
一种多传感融合的四旋翼无人机姿态估计方法.pdf

王秋****哥哥

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多传感融合的四旋翼无人机姿态估计方法.pdf
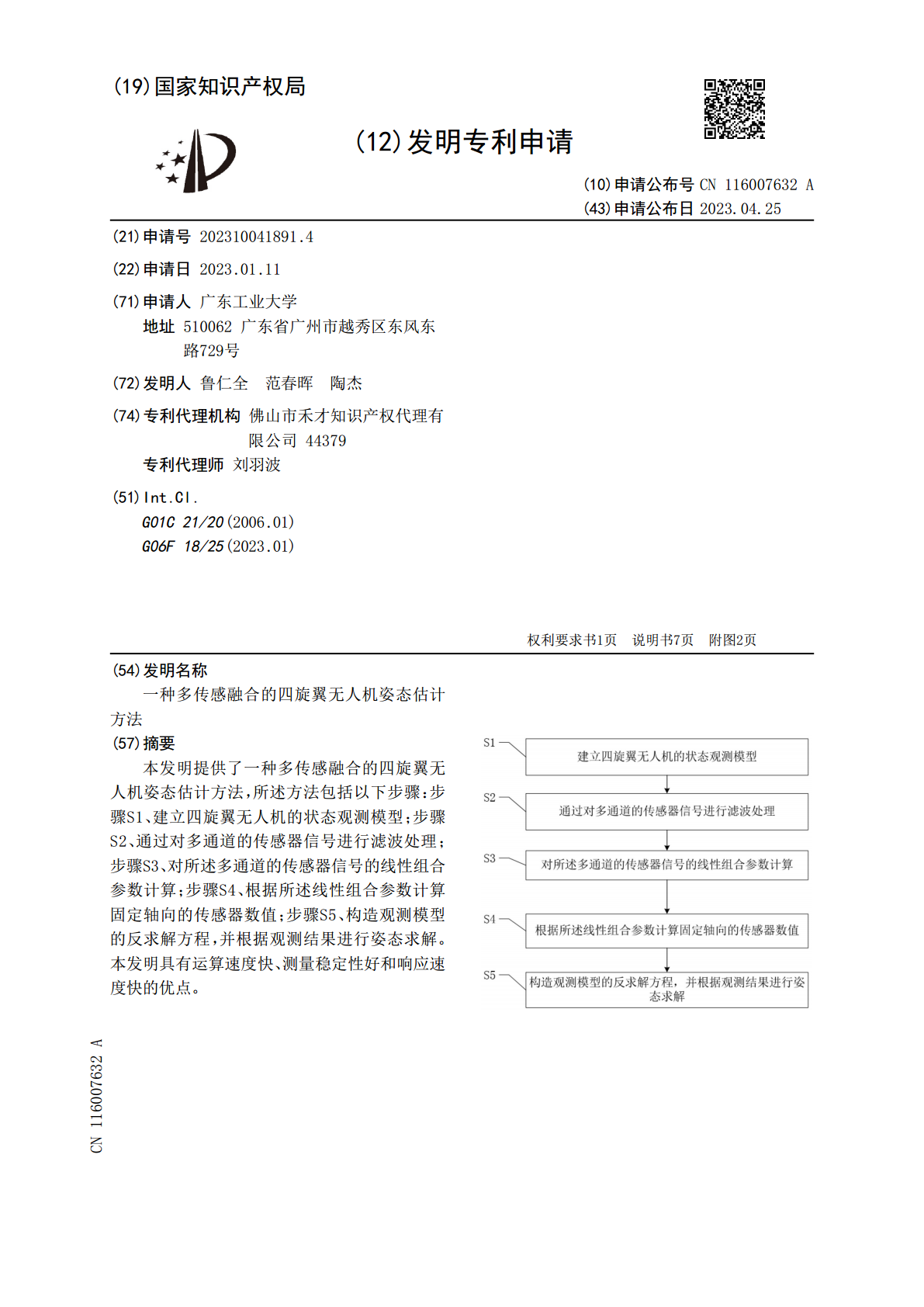
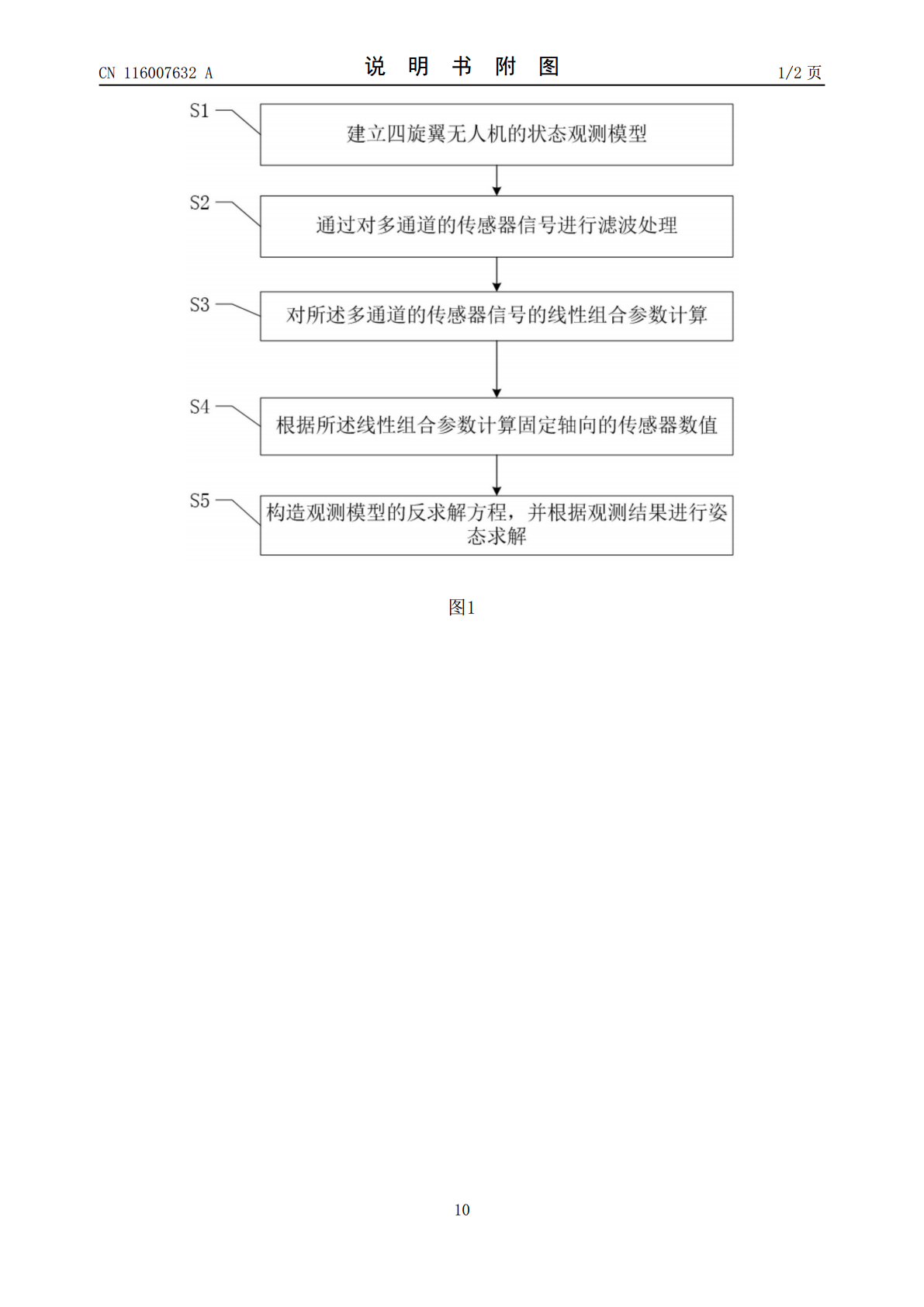
本发明提供了一种多传感融合的四旋翼无人机姿态估计方法,所述方法包括以下步骤:步骤S1、建立四旋翼无人机的状态观测模型;步骤S2、通过对多通道的传感器信号进行滤波处理;步骤S3、对所述多通道的传感器信号的线性组合参数计算;步骤S4、根据所述线性组合参数计算固定轴向的传感器数值;步骤S5、构造观测模型的反求解方程,并根据观测结果进行姿态求解。本发明具有运算速度快、测量稳定性好和响应速度快的优点。

一种基于ILOPF的四旋翼姿态估计方法.pdf
本发明提供了一种基于ILOPF的四旋翼姿态估计方法,包括如下步骤:步骤S1:初始化粒子集,根据需要估计的状态的值域范围,随机生成N个采样点,组成粒子集;步骤S2:利用EKF方法对粒子集进行更新,将得到的近似后验密度作为重要性密度函数,最后产生新的粒子集;步骤S3:对所述步骤S2中产生的新的粒子集进行权值更新;步骤S4:依据区分阈值将权值更新后的粒子集划分为复制组和抛弃组,并分别归一化权值;步骤S5:采用轮盘赌方法对归一化权值后的复制组进行重采样,并得出本次估计的结果。本发明提高了粒子的多样性,满足了实时性

基于视觉标志检测的旋翼无人机姿态估计方法.docx
基于视觉标志检测的旋翼无人机姿态估计方法摘要:本文提出了一种基于视觉标志检测的旋翼无人机姿态估计方法。该方法通过在无人机上安装摄像头,利用视觉标志识别算法实时检测场景中的标志物,从而获取无人机当前的姿态信息。该方法具有快速、准确、实时响应等优点,为场景无人机导航和控制提供了新的方法和思路。关键词:旋翼无人机,姿态估计,视觉标志,检测算法1.引言旋翼无人机已经成为当前领域内的热点研究之一,其广泛应用于农业、灾害救援、环境监测等领域。在无人机的操作中,姿态控制是最基本的操作之一,旋翼无人机的姿态估计是其飞行的

多旋翼无人机的姿态优化.docx
多旋翼无人机的姿态优化标题:多旋翼无人机姿态优化引言:多旋翼无人机作为一种具有广泛应用前景的无人飞行器,其姿态控制是保证飞行器稳定飞行和完成任务的关键要素之一。在传统的无人机姿态控制中,通常采用PID控制器进行控制,但这种控制方法难以满足其高机动性、对外界扰动的鲁棒性等要求。因此,姿态优化成为了当前无人机研究的热点之一,本论文旨在探讨多旋翼无人机姿态优化的方法与实现。一、多旋翼无人机姿态概述多旋翼无人机是一种以多个装有螺旋桨的电动无人机组成的飞行器。在三维空间中,多旋翼无人机具有六个自由度,分别为三个旋转

多旋翼无人机的姿态与导航信息融合算法研究.doc
多旋翼无人机的姿态与导航信息融合算法研究多旋翼无人机已被广泛应用于军事与民用领域。导航系统是多旋翼无人机的重要组成部分,是其实现安全与稳定飞行的基础。采用INS/GPS组合导航系统可实现高精度导航,该组合导航系统具有优势互补、导航机构冗余的特点,其实质是一个多传感器导航信息优化处理系统。无人机的主要导航参数就是依靠多传感器信息融合获得的,因此信息融合技术是组合导航系统的关键技术,目前已成为国内外学者研究的热点问题。本文以课题组自行研制的全新结构多旋翼小型无人机为研究平台,展开对机载多传感器组合导航系统信息