
一种轮腿复合式六足机器人移动平台.pdf

春兰****89


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮腿复合式六足机器人移动平台.pdf
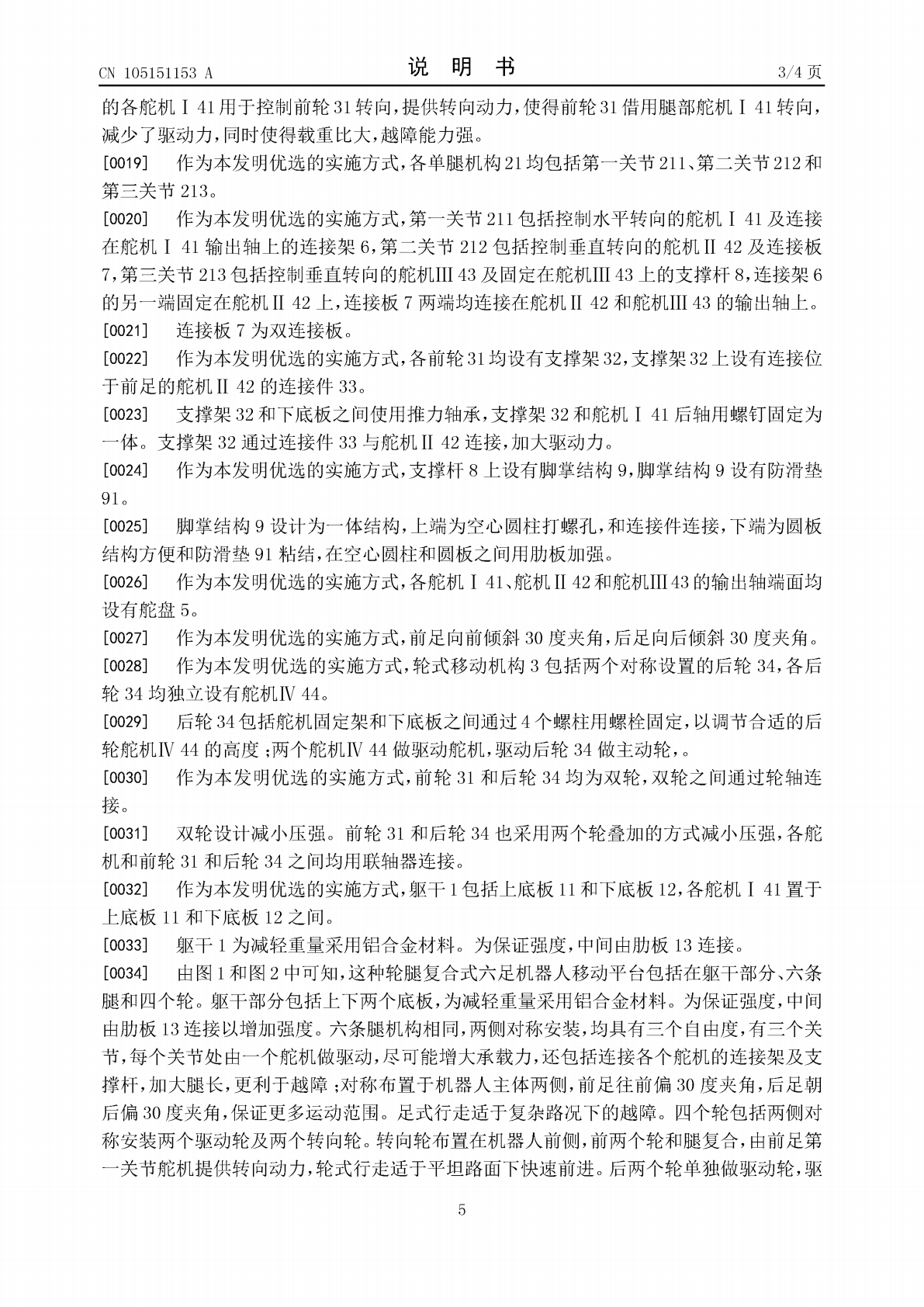
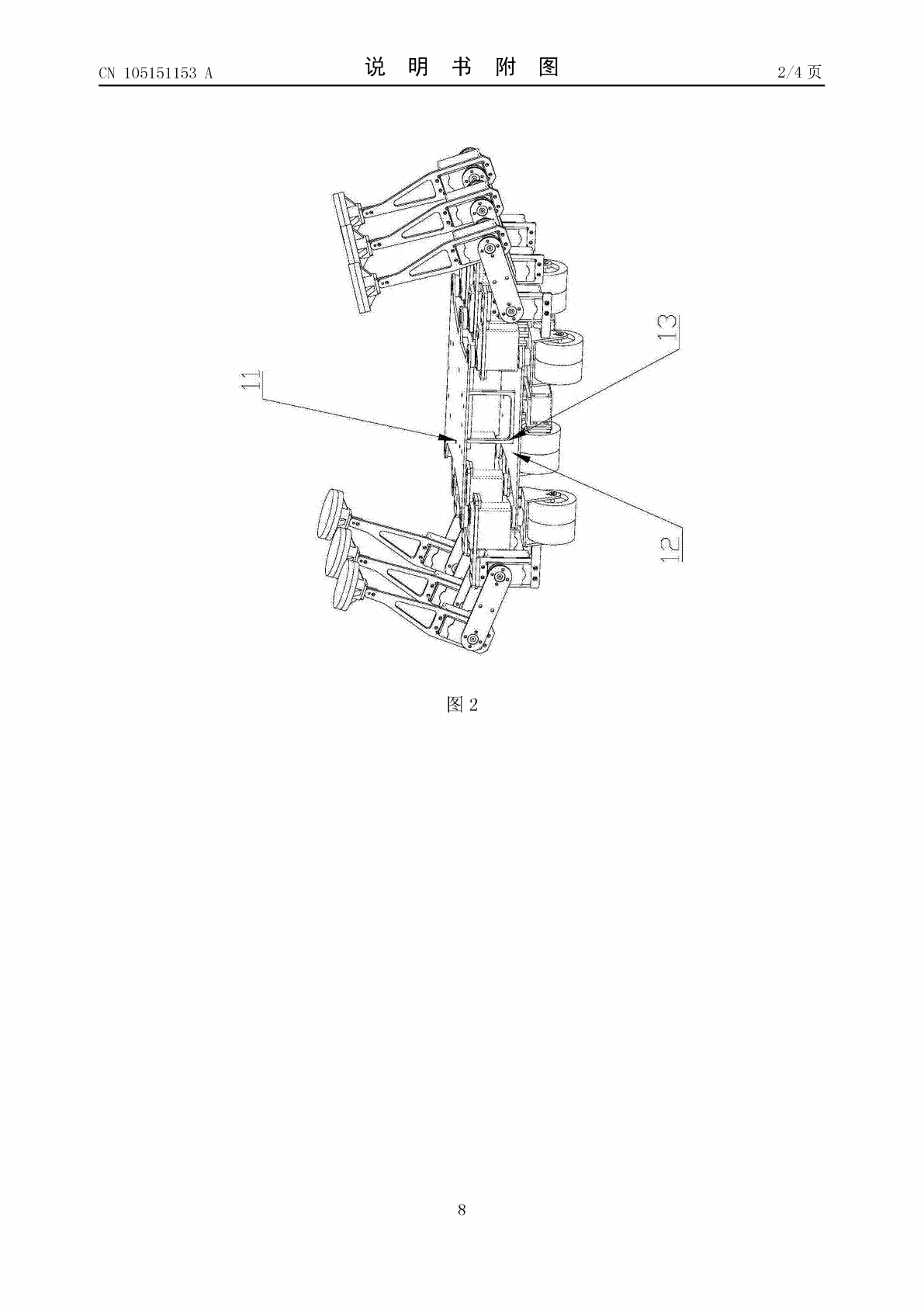
本发明公开了一种轮腿复合式六足机器人移动平台。此轮腿复合式六足机器人移动平台,在躯干及在躯干两侧设置的多足移动机构,以及躯干的底面设置的轮式移动机构,使得在复杂的环境下的越障采用多足移动机构运动越障,在平坦的环境下采用轮式移动机构运动,可根据路况选择运动方式,具有极强的运动能力和环境适应性,提高移动效率。转向的前轮布置在机器人前侧,前足的各舵机Ⅰ用于控制前轮转向,提供转向动力,使得前轮借用腿部舵机Ⅰ转向,减少了驱动力,同时使得载重比大,越障能力强。本发明适用于机器人领域。
一种轮腿混合式六足机器人.pdf
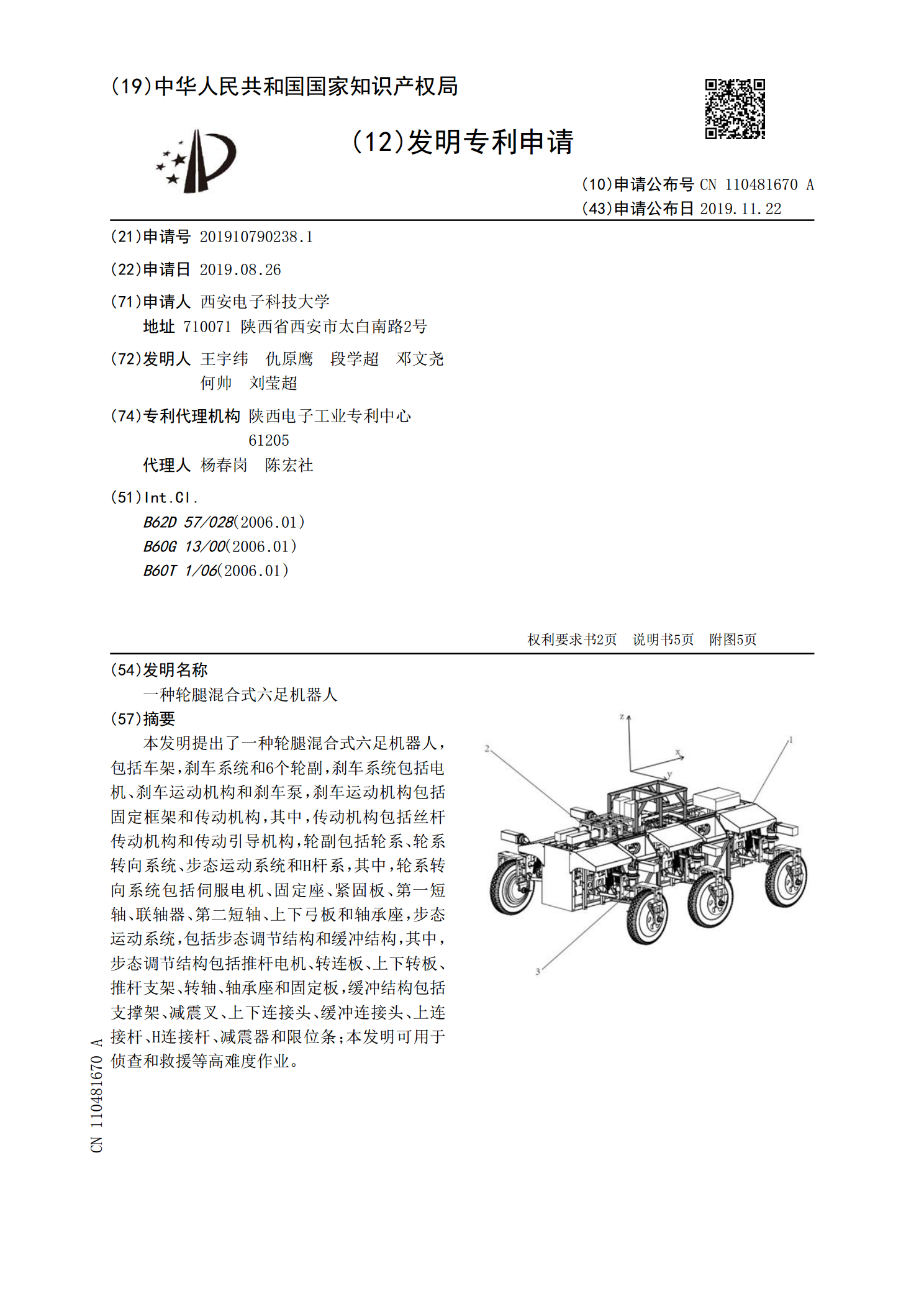
本发明提出了一种轮腿混合式六足机器人,包括车架,刹车系统和6个轮副,刹车系统包括电机、刹车运动机构和刹车泵,刹车运动机构包括固定框架和传动机构,其中,传动机构包括丝杆传动机构和传动引导机构,轮副包括轮系、轮系转向系统、步态运动系统和H杆系,其中,轮系转向系统包括伺服电机、固定座、紧固板、第一短轴、联轴器、第二短轴、上下弓板和轴承座,步态运动系统,包括步态调节结构和缓冲结构,其中,步态调节结构包括推杆电机、转连板、上下转板、推杆支架、转轴、轴承座和固定板,缓冲结构包括支撑架、减震叉、上下连接头、缓冲连接头、

一种轮腿复合式移动机器人平台.pdf
本发明公开一种轮腿复合式移动机器人平台,该机器人包括机架、前部轮腿系统和后部轮腿系统,前部轮腿系统包括前轴、三个前轮腿,前电机以及齿条和前传动系统;后部轮腿系统由摆腿系统和驱动系统两个子系统组成,安装于机架的后部;摆腿系统包括轴架、后轴、配轴,两个相同的轴套,四个相同的后轮腿和两台相同的第一组后电机以及后传动系统;驱动系统分成左右对称、结构相同的两部分,两部分分别由两台相同的第2组后电机独立驱动;每部分均包括复合轮、链条、皮带、小皮带轮和小链轮。本发明机器人平台采用轮腿复合式结构,结构简单,控制容易,在平

一种轮腿复合式移动机器人平台.pdf
本发明公开一种轮腿复合式移动机器人平台,该机器人平台包括车身、前、后车体和前、后轮腿系统,其特征在于前轮腿系统包括转向系统和前摆腿系统,转向系统包括转向电机、转向机构和转向车轮;前摆腿系统包括前摆腿电机、前轮腿支架和前摆腿车轮,两个子系统都安装在前箱体内,前箱体利用其后部伸出的前短轴与车身连接;后轮腿系统由车体及后摆腿系统和驱动系统组成,两个子系统都安装在后车体上;后车体利用其前部伸出的后短轴与车身连接;车身部分主要包括转角电机,转角电机安装在车身内部,与车身之间无相对运动,扭矩输出端连接一个齿轮,与之啮

一种轮足两用复合式移动机器人腿.pdf
本发明涉及一种轮足两用复合式移动机器人腿,第二同步带轮通过第一轴承和第三轴承与车体连接,通过第一大轮轮毂与第一大轮连接,通过第二轴承与第一轴连接;第一大轮轮毂与第一同步带轮连接,第一同步带轮通过同步带与第三同步带轮连接;第二大轮组合与第三同步带轮连接,同时通过第五轴承与第三轴连接;第一轴通过第二轴承与第二同步带轮连接,与长连杆通过键槽连接;电机驱动器、电机谐波减速器组合安装在长连杆上,第三轴通过第六轴承与长连杆连接;短连杆与第三轴连接,另一端与第二轴连接;小轮、小轮轮毂通过第四轴承与第二轴连接,小轮轮毂与