
一种轮腿混合式六足机器人.pdf

运升****魔王

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮腿混合式六足机器人.pdf
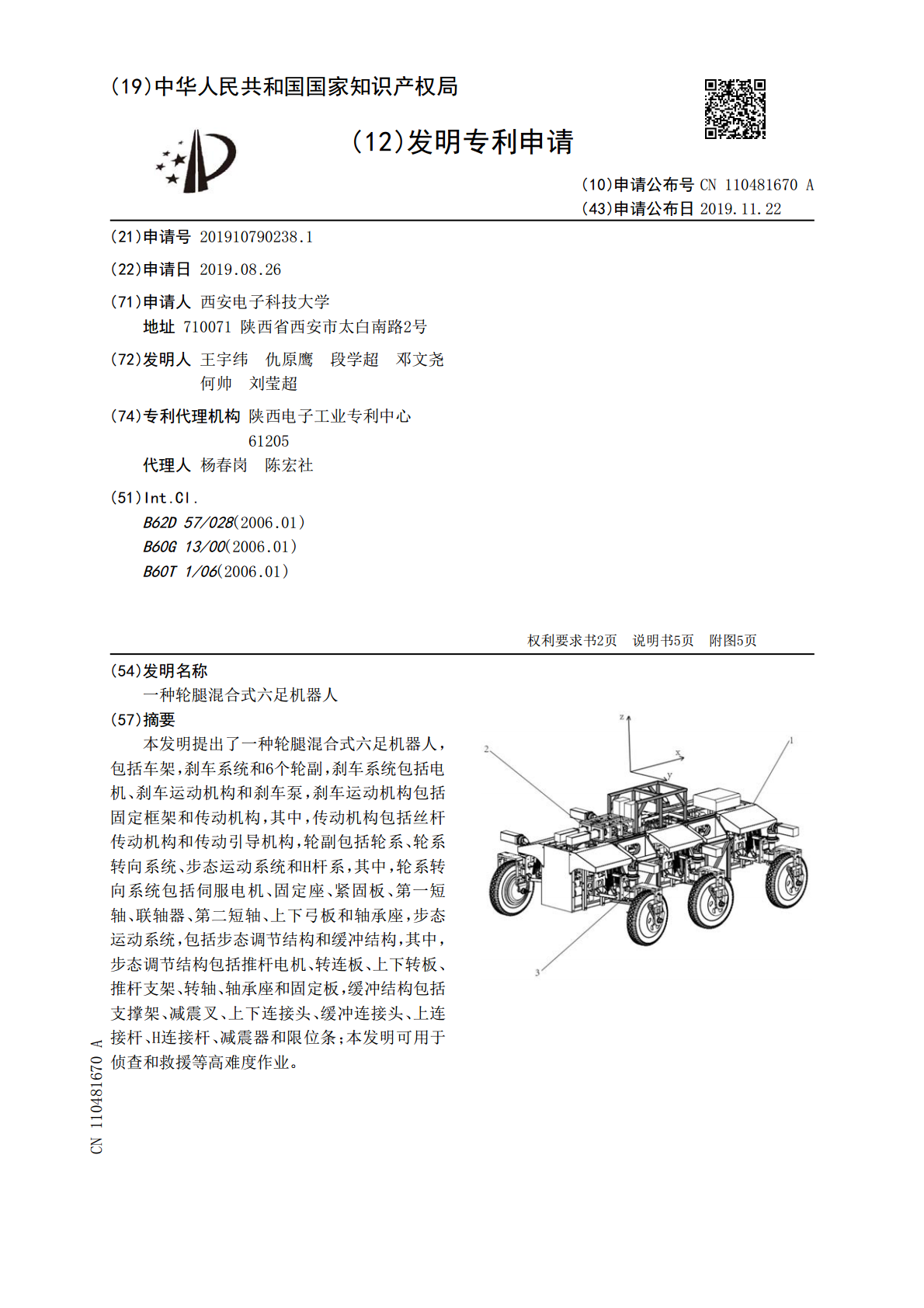
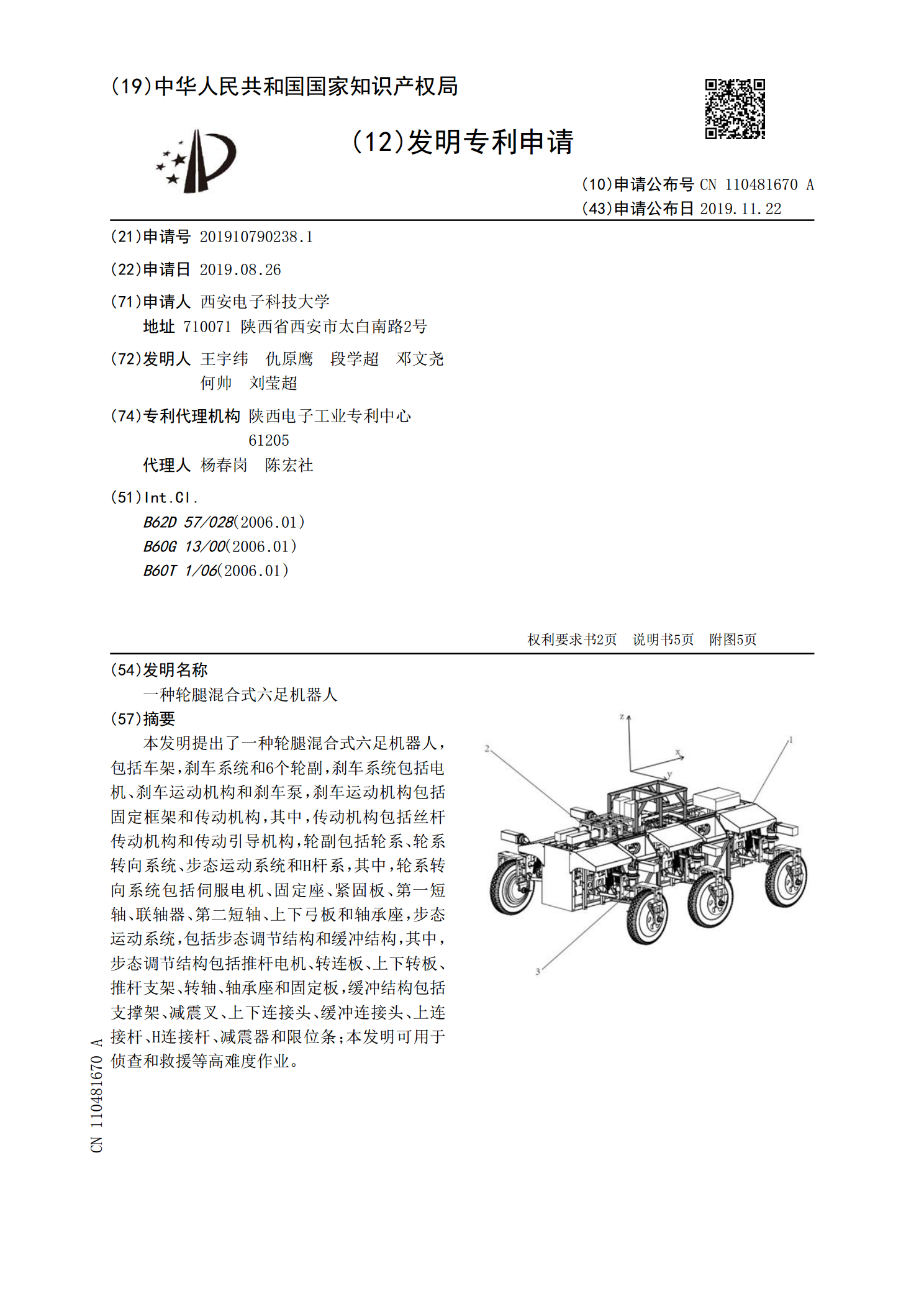
本发明提出了一种轮腿混合式六足机器人,包括车架,刹车系统和6个轮副,刹车系统包括电机、刹车运动机构和刹车泵,刹车运动机构包括固定框架和传动机构,其中,传动机构包括丝杆传动机构和传动引导机构,轮副包括轮系、轮系转向系统、步态运动系统和H杆系,其中,轮系转向系统包括伺服电机、固定座、紧固板、第一短轴、联轴器、第二短轴、上下弓板和轴承座,步态运动系统,包括步态调节结构和缓冲结构,其中,步态调节结构包括推杆电机、转连板、上下转板、推杆支架、转轴、轴承座和固定板,缓冲结构包括支撑架、减震叉、上下连接头、缓冲连接头、

轮腿混合式四足机器人.pdf
一种轮腿混合式四足机器人,其特征在于:包括内、外车架、缓冲组件、两对大腿并联组件和4个结构完全相同的轮式腿,内车架设在外车架内,内、外车架之间由缓冲组件相连,设在外车架下面的两前腿的大腿并联组件左右对称,并且与这两并联组件相连的两前轮式腿也左右对称,设在内车架下面的两后腿的大腿并联组件左右对称,并且与这两并联组件相连的两后轮式腿也左右对称,其中的每条腿均为(2-UPS+U)R串并混联结构。本发明负载大,刚度好,耦合性小,可充分发挥出了腿机构的越障优势;减小了控制的复杂性和机械机构的复杂性,又使得安装简单方
一种六足轮腿式爬行机器人.pdf
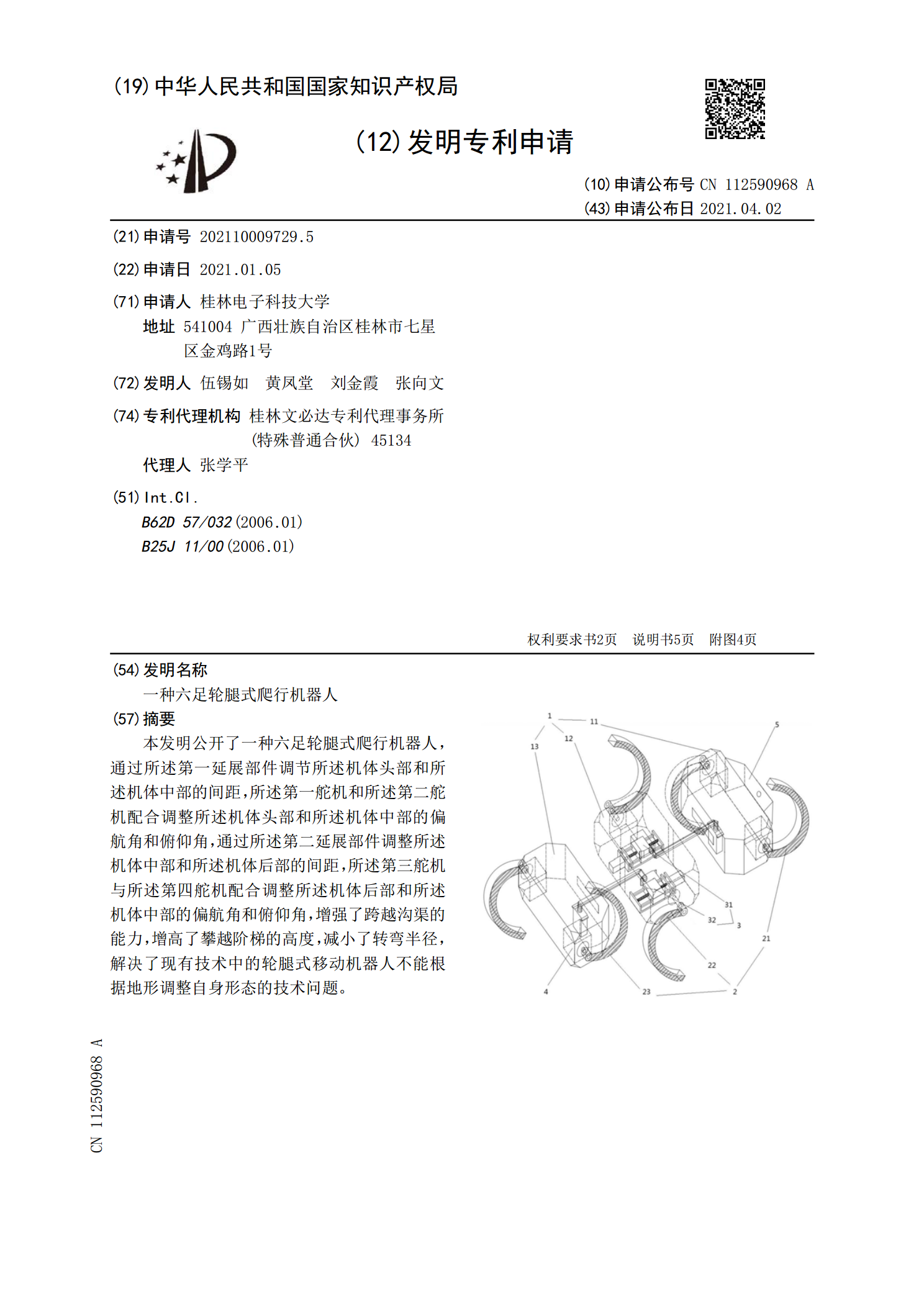
本发明公开了一种六足轮腿式爬行机器人,通过所述第一延展部件调节所述机体头部和所述机体中部的间距,所述第一舵机和所述第二舵机配合调整所述机体头部和所述机体中部的偏航角和俯仰角,通过所述第二延展部件调整所述机体中部和所述机体后部的间距,所述第三舵机与所述第四舵机配合调整所述机体后部和所述机体中部的偏航角和俯仰角,增强了跨越沟渠的能力,增高了攀越阶梯的高度,减小了转弯半径,解决了现有技术中的轮腿式移动机器人不能根据地形调整自身形态的技术问题。

偏心轮腿六足机器人.pdf
偏心轮腿六足机器人,采用偏心轮结构作为腿的形式,机身结构采用对称设计并呈扁平狭长体型。该机器人包括机身框架、偏心轮、电机、电源、光电编码器、控制电路、遥控器。机器人能克服传统腿结构的功耗剧烈振荡,并保证了前进、后退、左右转向功能完整性。该机器人地表适应性强,较宽的偏心轮腿不仅适合平整硬质地表,草地、沙滩、碎石等地表都能行走;该机器人越障能力强,能轻松跨越略低于机身高度的障碍物。

一种轮足混合式四足机器人.pdf
本发明公开了一种轮足混合式四足机器人,包括整机基座、行走足、滚轮足和支撑液压推杆,所述行走足布置在整机基座的前后两端,且每端各分布两个,每个行走足的结构相同;所述滚轮足布置在整机基座中间位置的两侧,且每侧各分布两个,一侧的两个为驱动轮滚轮足,另一侧的两个为从动轮滚轮足;所述整机基座左右两侧均设有均匀分布的两个支撑液压推杆;本发明结构简单紧凑,承载能力强,本发明的轮足混合式四足机器人能够以多种步态行进。