
一种轮腿复合式移动机器人平台.pdf

英哲****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮腿复合式移动机器人平台.pdf
本发明公开一种轮腿复合式移动机器人平台,该机器人包括机架、前部轮腿系统和后部轮腿系统,前部轮腿系统包括前轴、三个前轮腿,前电机以及齿条和前传动系统;后部轮腿系统由摆腿系统和驱动系统两个子系统组成,安装于机架的后部;摆腿系统包括轴架、后轴、配轴,两个相同的轴套,四个相同的后轮腿和两台相同的第一组后电机以及后传动系统;驱动系统分成左右对称、结构相同的两部分,两部分分别由两台相同的第2组后电机独立驱动;每部分均包括复合轮、链条、皮带、小皮带轮和小链轮。本发明机器人平台采用轮腿复合式结构,结构简单,控制容易,在平

一种轮腿复合式移动机器人平台.pdf
本发明公开一种轮腿复合式移动机器人平台,该机器人平台包括车身、前、后车体和前、后轮腿系统,其特征在于前轮腿系统包括转向系统和前摆腿系统,转向系统包括转向电机、转向机构和转向车轮;前摆腿系统包括前摆腿电机、前轮腿支架和前摆腿车轮,两个子系统都安装在前箱体内,前箱体利用其后部伸出的前短轴与车身连接;后轮腿系统由车体及后摆腿系统和驱动系统组成,两个子系统都安装在后车体上;后车体利用其前部伸出的后短轴与车身连接;车身部分主要包括转角电机,转角电机安装在车身内部,与车身之间无相对运动,扭矩输出端连接一个齿轮,与之啮

轮腿复合式运动平台.pdf
一种轮腿复合式运动平台,包括机架以及连接于机架底部的两个以上的前部轮腿组件、两个以上的后部轮腿组件,机架包括通过铰接在一起的前部身板和后部身板,前部轮腿组件和后部轮腿组件均包括大腿摆臂、车轮机构以及小腿摆臂,大腿摆臂的一端铰接于机架上并可绕铰点摆动,大腿摆臂的另一端与小腿摆臂的一端相连形成肘部并可绕肘部摆动形成折叠,车轮机构装设于小腿摆臂中段处,小腿摆臂的底部末端设有用来完成行走的足部。本发明具有结构简单紧凑、运动平稳可靠、操控性好、运动模态切换简单、越障能力强等优点。

一种轮腿复合式智能移动机器人.pdf
一种轮腿复合式智能移动机器人,涉及智能移动机器人领域。解决了现有战争物资运输工具体积大、结构复杂和运输能力差的问题。一种轮腿复合式智能移动机器人包括车箱体、车底盘和轮腿复合机构,所述车底盘的前部、中部和后部的左右两侧均对称设有轮腿复合机构,车箱体的底部与车底盘的顶部连接,且所述车箱体与车底盘为可拆卸结构。每个轮腿复合机构均包括行走机构和摆腿机构,所述行走机构用于实现机器人行走运动,所述摆腿机构用于实现机器人的摆腿运动。本发明采用轮腿复合式机构,运动效率高,针对不同的地面可以采用不同的行驶模式,四轮行驶或者
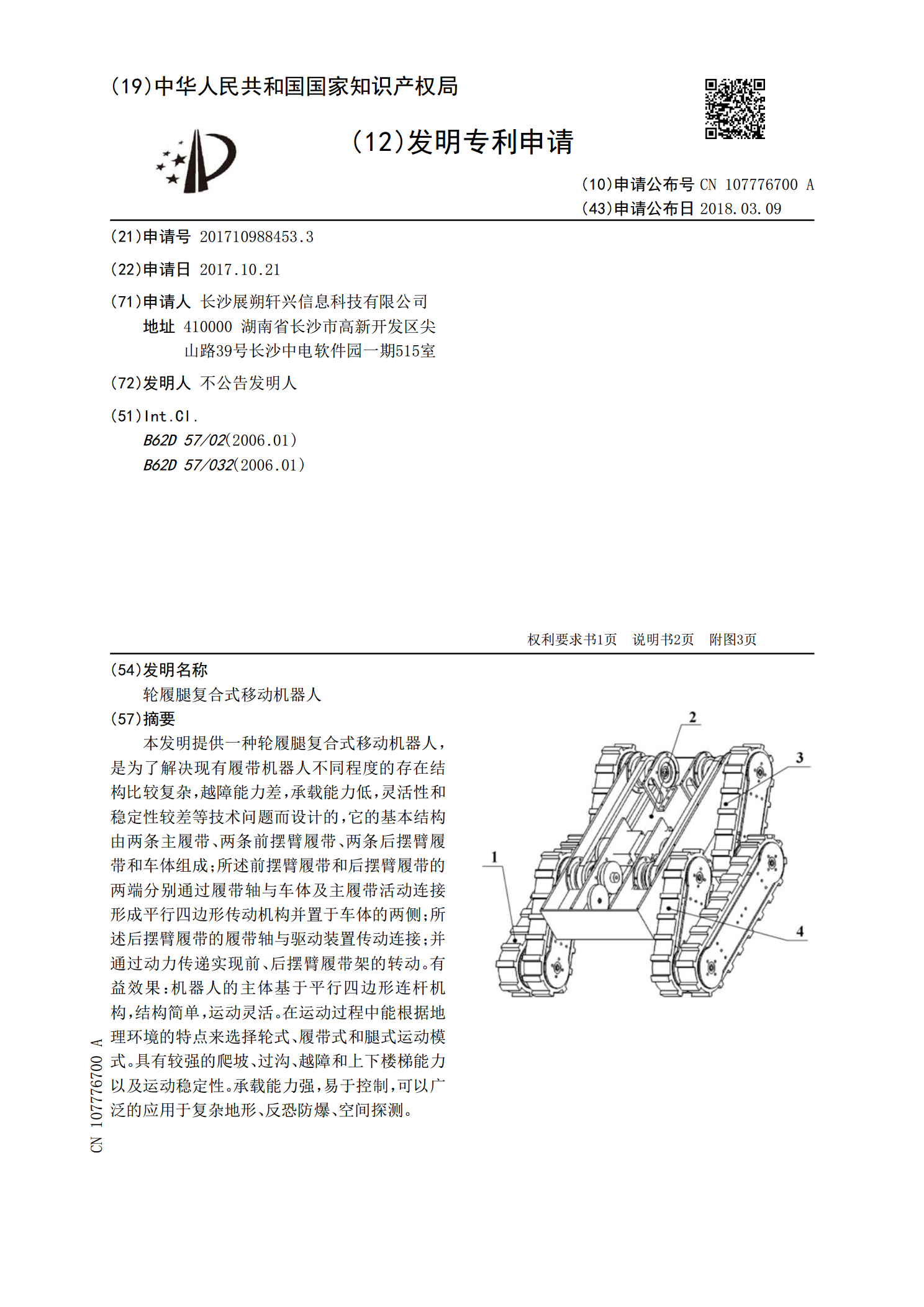
轮履腿复合式移动机器人.pdf
本发明提供一种轮履腿复合式移动机器人,是为了解决现有履带机器人不同程度的存在结构比较复杂,越障能力差,承载能力低,灵活性和稳定性较差等技术问题而设计的,它的基本结构由两条主履带、两条前摆臂履带、两条后摆臂履带和车体组成;所述前摆臂履带和后摆臂履带的两端分别通过履带轴与车体及主履带活动连接形成平行四边形传动机构并置于车体的两侧;所述后摆臂履带的履带轴与驱动装置传动连接;并通过动力传递实现前、后摆臂履带架的转动。有益效果:机器人的主体基于平行四边形连杆机构,结构简单,运动灵活。在运动过程中能根据地理环境的特点