
一种基于高斯过程混合模型的机械臂抓取方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于高斯过程混合模型的机械臂抓取方法.docx
一种基于高斯过程混合模型的机械臂抓取方法一、简介机械臂的抓取成为了机器人技术研究中的重要问题。在机械臂的抓取过程中,如何选择最优的位置和姿态来抓取目标物体是一个非常困难的问题。传统的抓取方法通常需要人为地编制程序来预先计算机器人姿态和运动,来进行精确定位和抓取。这些方法可能需要预先固定好抓取位置和姿态,使得效果较为受限。近年来随着机器人技术的发展,基于高斯过程混合模型来解决机械臂抓取问题的方法成为了研究热点。本文就介绍了一种基于高斯过程混合模型的机械臂抓取方法。二、相关工作1.先验概率建模方法传统的机械臂

基于高斯混合模型的多模态过程监测.docx
基于高斯混合模型的多模态过程监测基于高斯混合模型的多模态过程监测摘要:随着传感技术的发展,多模态过程监测越来越受到研究者的关注。在多模态过程监测中,不同传感器可以提供不同类型的数据,如图像、声音、加速度等。对于这些多模态数据的监测,传统的单一模态监测方法已经无法满足需求。因此,本文提出了一种基于高斯混合模型的多模态过程监测方法。通过对不同模态数据进行特征提取,并利用高斯混合模型对数据进行建模和分析,可以实现更为精确和可靠的多模态过程监测。第一章引言1.1研究背景随着科学技术的不断进步,传感技术在各个领域得
一种基于平面视觉引导机械臂的抓取方法.pdf
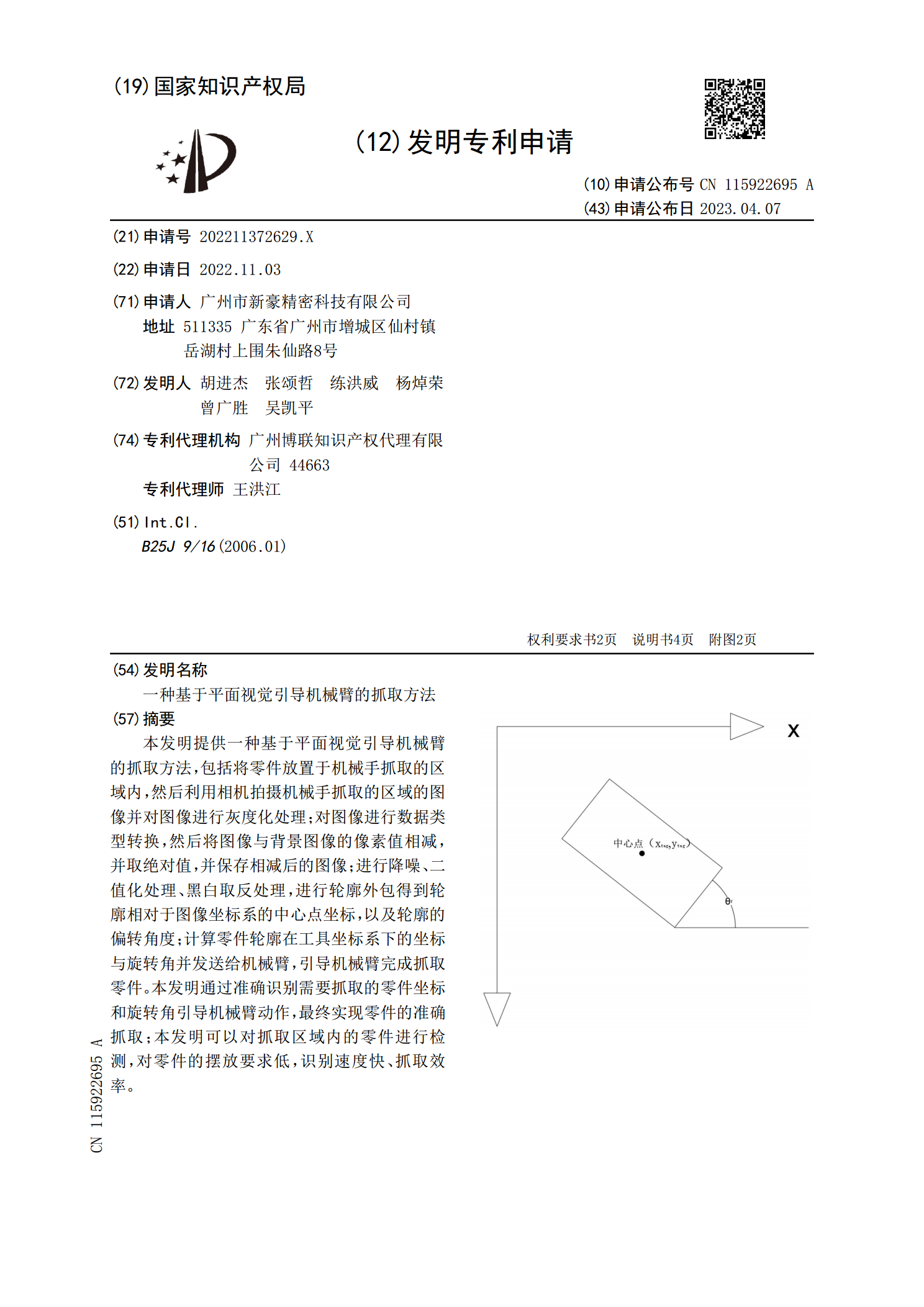
本发明提供一种基于平面视觉引导机械臂的抓取方法,包括将零件放置于机械手抓取的区域内,然后利用相机拍摄机械手抓取的区域的图像并对图像进行灰度化处理;对图像进行数据类型转换,然后将图像与背景图像的像素值相减,并取绝对值,并保存相减后的图像;进行降噪、二值化处理、黑白取反处理,进行轮廓外包得到轮廓相对于图像坐标系的中心点坐标,以及轮廓的偏转角度;计算零件轮廓在工具坐标系下的坐标与旋转角并发送给机械臂,引导机械臂完成抓取零件。本发明通过准确识别需要抓取的零件坐标和旋转角引导机械臂动作,最终实现零件的准确抓取;本发

基于高斯模型和视觉测量的机械臂在线自标定方法研究.docx
基于高斯模型和视觉测量的机械臂在线自标定方法研究机械臂在线自标定方法是机器人学领域的热门研究方向,它可以实时监测机械臂关节角度误差和位姿误差,并根据这些误差实现自身的校准,从而提高机械臂的精度和稳定性。本文以基于高斯模型和视觉测量的机械臂在线自标定方法为主题,分别从方法原理、关键技术和应用前景三个方面进行探讨。一、方法原理基于高斯模型和视觉测量的机械臂在线自标定方法是一种基于概率统计的机器人校准方法。首先,它利用高斯过程回归模型对关节角度误差进行建模,以此预测机械臂在运动过程中的有效位姿,通过对比实际位姿

基于高斯模型和视觉测量的机械臂在线自标定方法研究.pptx
汇报人:/目录01高斯模型的基本原理高斯模型在机械臂标定中的适用性高斯模型在机械臂标定中的优势02视觉测量的基本原理视觉测量在机械臂标定中的重要性视觉测量在机械臂标定中的实现方式03方法概述标定流程标定实验及结果分析04方法优势局限性分析改进方向05与传统标定方法的比较与其他在线自标定方法的比较综合评价06实际应用场景分析未来研究方向与展望汇报人: