
基于高斯模型和视觉测量的机械臂在线自标定方法研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于高斯模型和视觉测量的机械臂在线自标定方法研究.docx
基于高斯模型和视觉测量的机械臂在线自标定方法研究机械臂在线自标定方法是机器人学领域的热门研究方向,它可以实时监测机械臂关节角度误差和位姿误差,并根据这些误差实现自身的校准,从而提高机械臂的精度和稳定性。本文以基于高斯模型和视觉测量的机械臂在线自标定方法为主题,分别从方法原理、关键技术和应用前景三个方面进行探讨。一、方法原理基于高斯模型和视觉测量的机械臂在线自标定方法是一种基于概率统计的机器人校准方法。首先,它利用高斯过程回归模型对关节角度误差进行建模,以此预测机械臂在运动过程中的有效位姿,通过对比实际位姿

基于高斯模型和视觉测量的机械臂在线自标定方法研究.pptx
汇报人:/目录01高斯模型的基本原理高斯模型在机械臂标定中的适用性高斯模型在机械臂标定中的优势02视觉测量的基本原理视觉测量在机械臂标定中的重要性视觉测量在机械臂标定中的实现方式03方法概述标定流程标定实验及结果分析04方法优势局限性分析改进方向05与传统标定方法的比较与其他在线自标定方法的比较综合评价06实际应用场景分析未来研究方向与展望汇报人:
一种基于双目视觉的机械臂运动学自标定方法.pdf
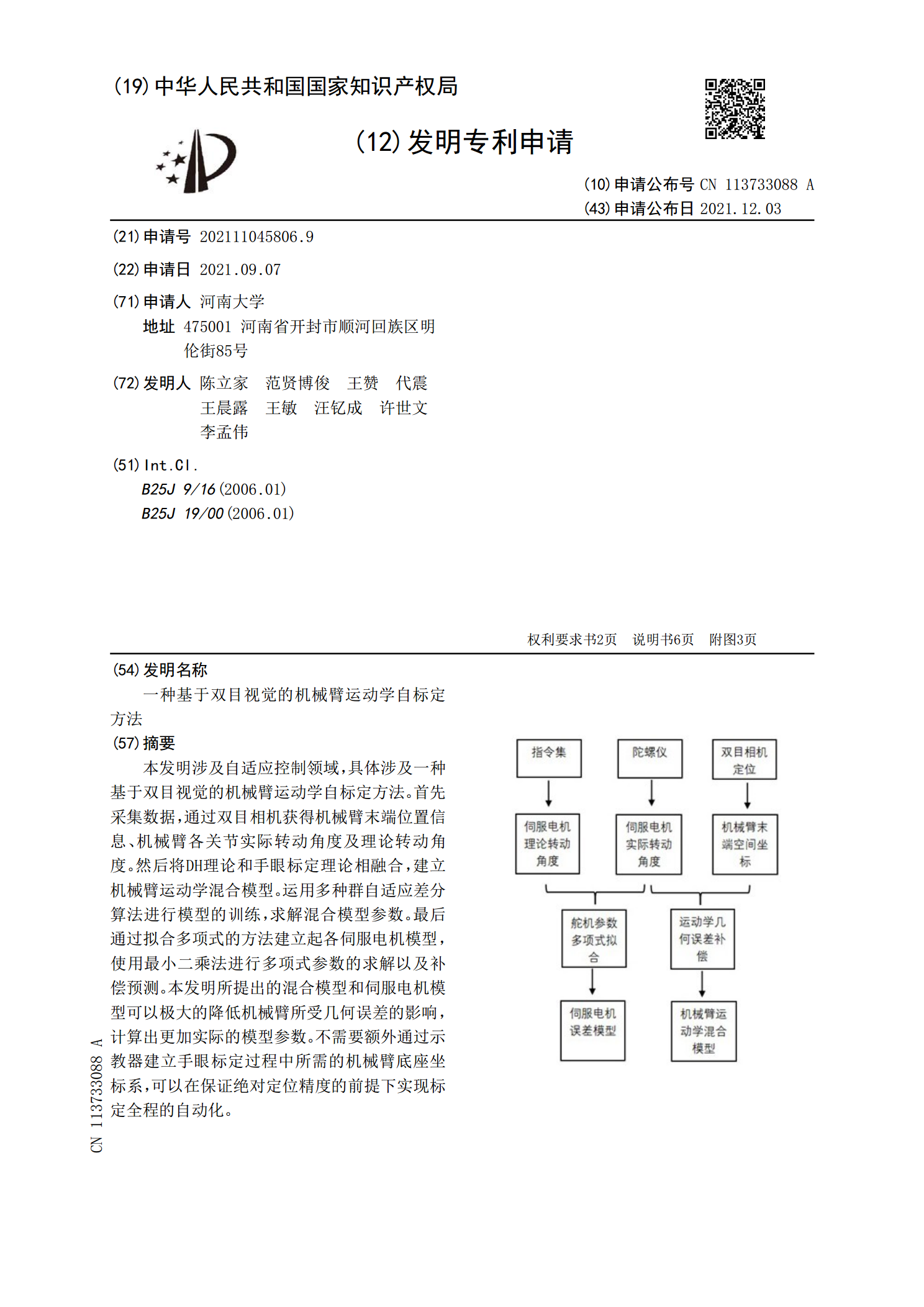
本发明涉及自适应控制领域,具体涉及一种基于双目视觉的机械臂运动学自标定方法。首先采集数据,通过双目相机获得机械臂末端位置信息、机械臂各关节实际转动角度及理论转动角度。然后将DH理论和手眼标定理论相融合,建立机械臂运动学混合模型。运用多种群自适应差分算法进行模型的训练,求解混合模型参数。最后通过拟合多项式的方法建立起各伺服电机模型,使用最小二乘法进行多项式参数的求解以及补偿预测。本发明所提出的混合模型和伺服电机模型可以极大的降低机械臂所受几何误差的影响,计算出更加实际的模型参数。不需要额外通过示教器建立手眼

基于视觉测量的回转轴线标定方法研究.docx
基于视觉测量的回转轴线标定方法研究摘要:回转轴线标定是计算机视觉中的一项基本任务,其用途广泛,不仅应用于机器人定位、三维重建等领域,在工业制造和测量领域也有着重要的应用。本文针对回转轴线标定问题,通过视觉测量的方式,介绍了一种基于相机参数标定和坐标变换的回转轴线标定方法,并将其应用于四边形标识的场景中进行了实验,取得了良好的结果。关键词:视觉测量、回转轴线标定、相机参数标定、坐标变换、四边形标识。引言:回转轴线标定是计算机视觉中的一项基本任务,其目的是通过已知的相机参数,计算出三维场景中物体的旋转轴线。回

基于图像的机械臂无标定视觉伺服研究的任务书.docx
基于图像的机械臂无标定视觉伺服研究的任务书一、任务背景目前,机械臂已经被广泛应用于工业生产自动化领域。在机器人操作中,精确定位和控制是非常重要的,因此需要高精度的视觉伺服技术来实现机械臂的精准操作。而对于机械臂的视觉伺服技术,传统的方法是需要对相机和机械臂进行严格的标定,然而这种方法存在很多问题,比如标定不易、容易出错、需要额外高昂的成本等等。在这种情况下,基于图像的机械臂无标定视觉伺服技术应运而生。该技术利用相机捕获的图像进行机械臂的伺服控制,避免了标定的过程。因此,本次任务的主要目标就是基于图像的机械