
一种多自由度仿生机构.pdf

一吃****福乾

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多自由度仿生机构.pdf
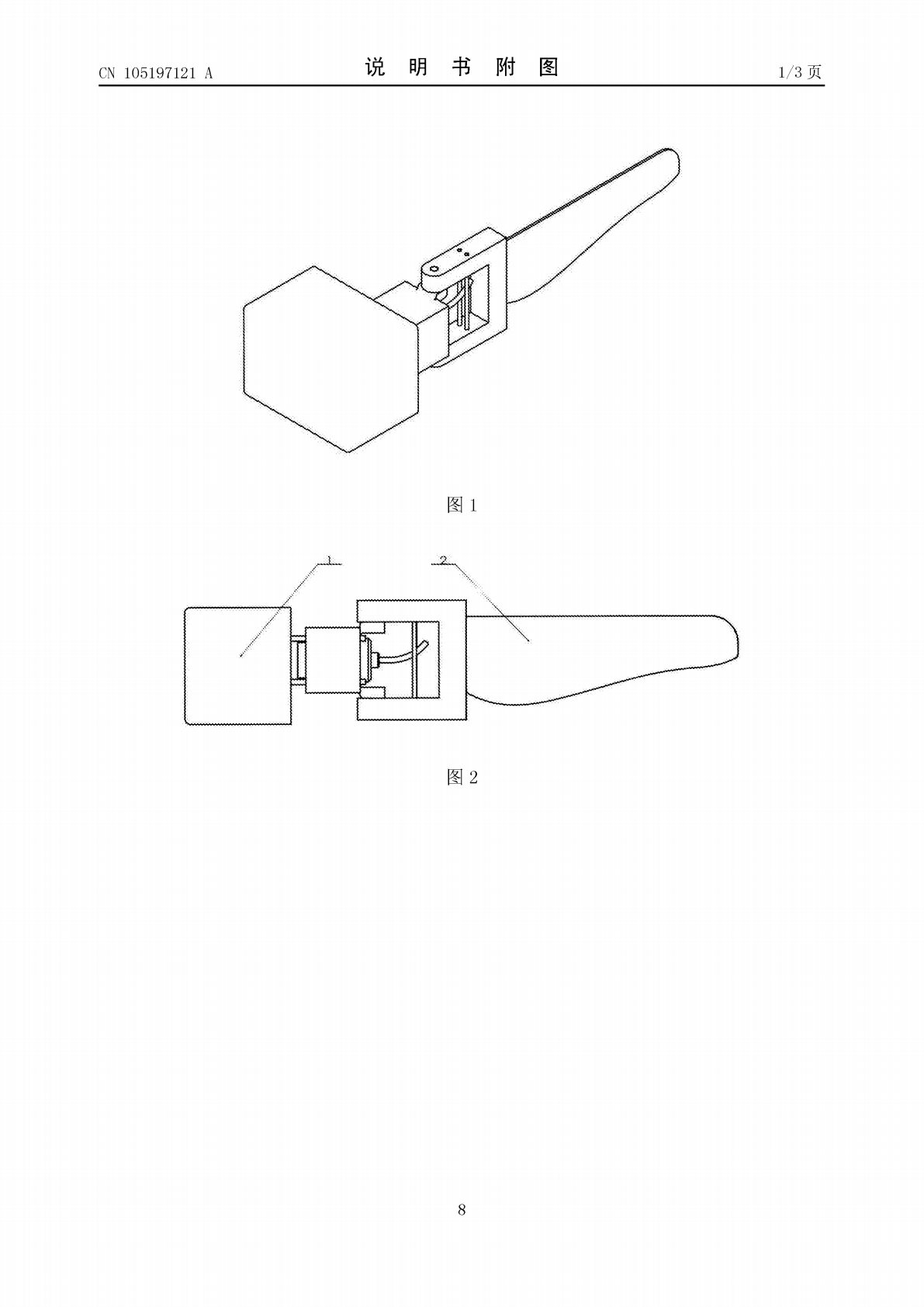
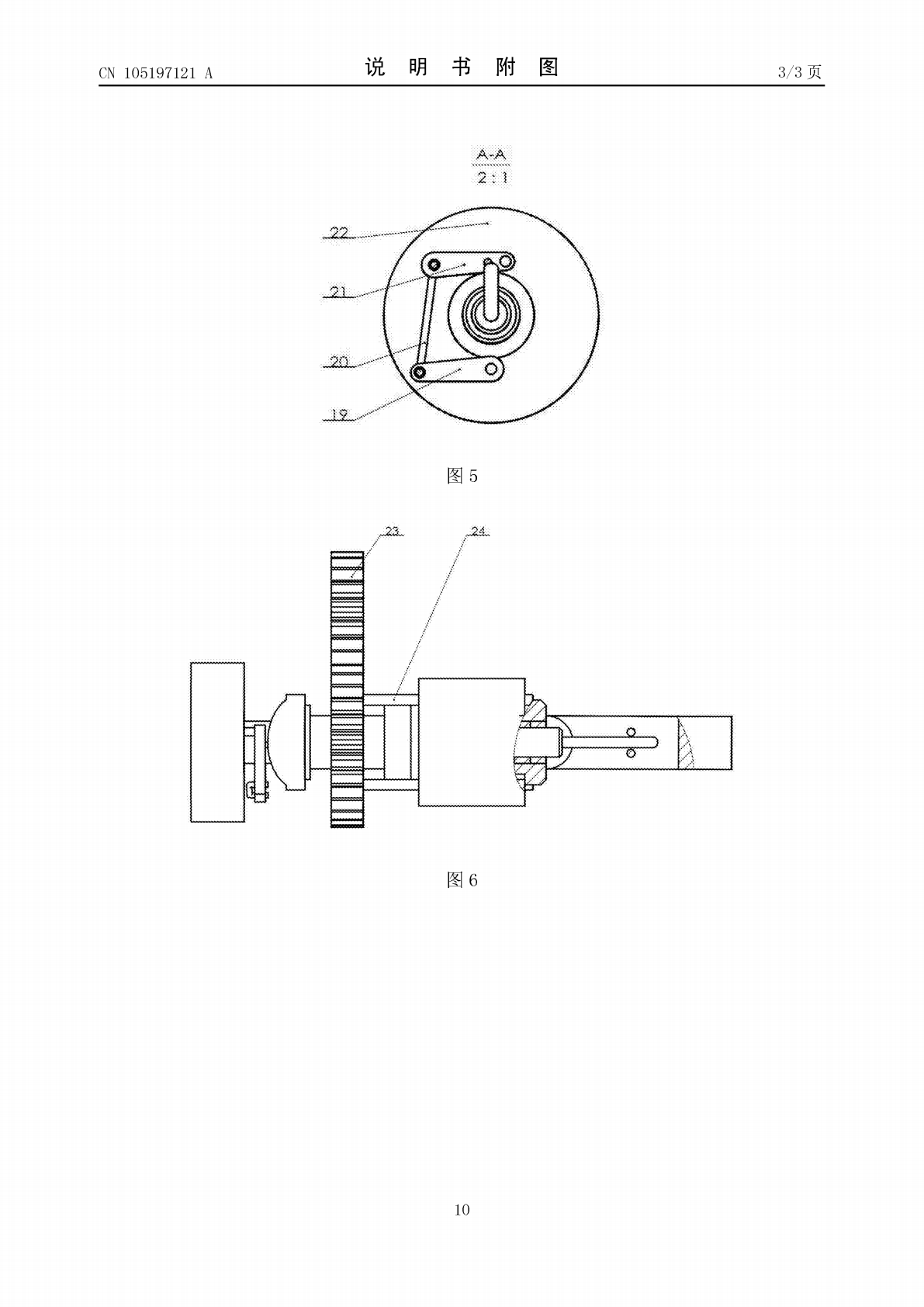
一种多自由度仿生机构,包括连接机构本体和振动翼,振动翼与机构本体的转动臂相连接,连接机构本体包括齿轮驱动电机、主动齿轮、从动齿轮、导轨、转动轴、转动箱体和转动臂。从动齿轮通过从动齿轮直线轴承安装在转动轴上,主动齿轮与齿轮驱动电机连接,齿轮驱动电机带动主动齿轮旋转,从动齿轮与主动齿轮啮合且由主动齿轮带动旋转。而且从动齿轮上焊接了四根导轨,四根导轨与转动箱体相连。转动臂通过销钉与转动箱体连接,当从动齿轮转动时能够带动转动箱体的旋转,同时转动臂也跟着一起转动;主动齿轮和从动齿轮的连续性转动,能够驱动转动臂实现正

一种多自由度机器仿生手.pdf
本发明公开了一种多自由度机器仿生手,包括与机器手掌基体连接的五根手指,这五根手指依次包括拇指、食指、中指、无名指、小指,食指、中指、无名指和小指这四根手指结构相同、且每根手指各自具有两个屈伸自由度;这四根手指中每根手指包括安装有电机和传动蜗轮蜗杆的壳体、指根、指尖、传动连杆;传动蜗轮蜗杆的一端与电机的输出轴相连,传动蜗轮蜗杆的另一端与指根的一端转动相连,指根的另一端与指尖的后段转动相连;传动连杆一端与壳体转动相连,传动连杆的另一端还与指尖后段的内侧转动相连;本发明多自由度机器仿生手技术手段简便易行,操控灵
一种多自由度机构.pdf
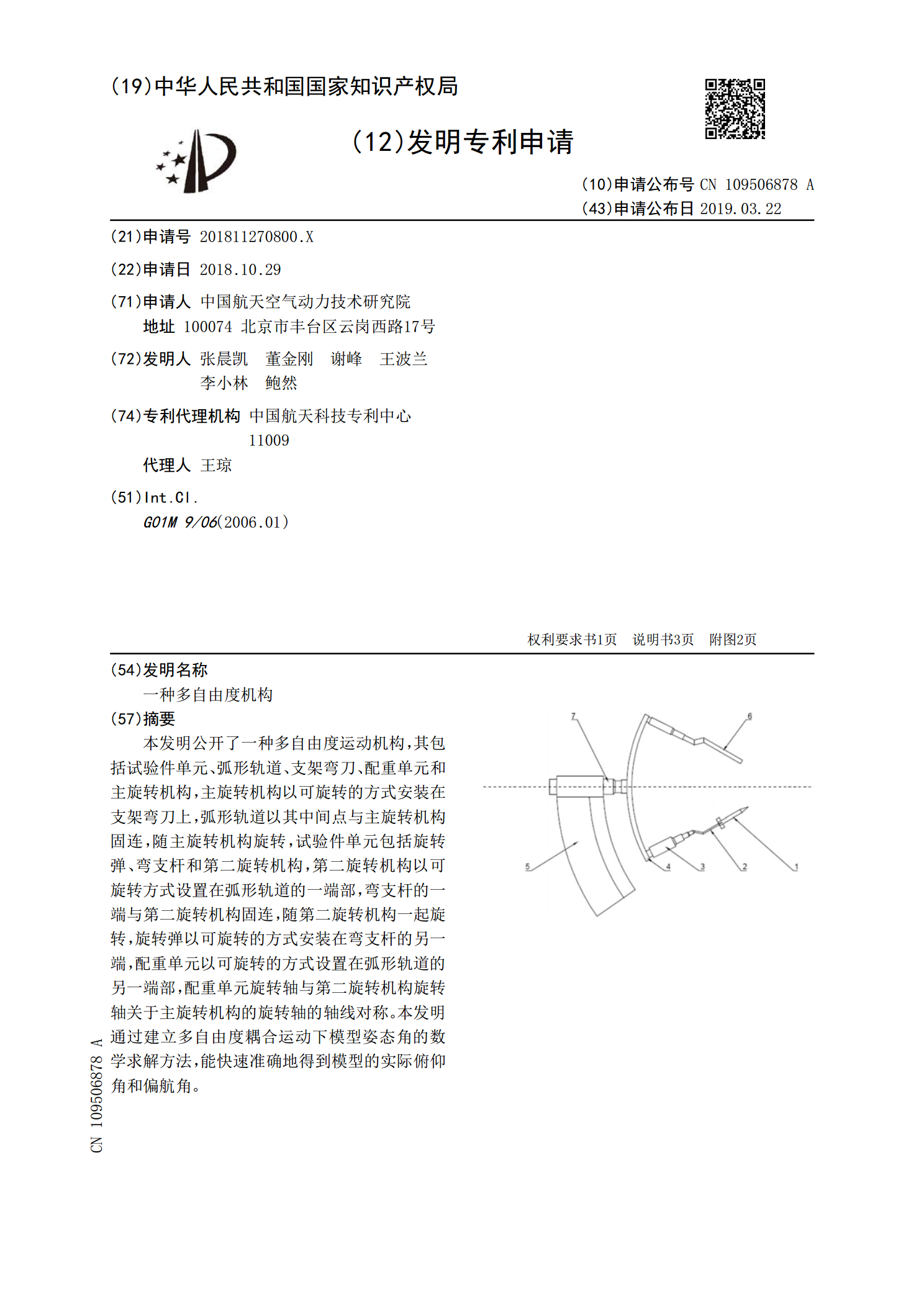
本发明公开了一种多自由度运动机构,其包括试验件单元、弧形轨道、支架弯刀、配重单元和主旋转机构,主旋转机构以可旋转的方式安装在支架弯刀上,弧形轨道以其中间点与主旋转机构固连,随主旋转机构旋转,试验件单元包括旋转弹、弯支杆和第二旋转机构,第二旋转机构以可旋转方式设置在弧形轨道的一端部,弯支杆的一端与第二旋转机构固连,随第二旋转机构一起旋转,旋转弹以可旋转的方式安装在弯支杆的另一端,配重单元以可旋转的方式设置在弧形轨道的另一端部,配重单元旋转轴与第二旋转机构旋转轴关于主旋转机构的旋转轴的轴线对称。本发明通过建立
一种基于变胞机构的空间多自由度分节控制仿生柔性臂.pdf
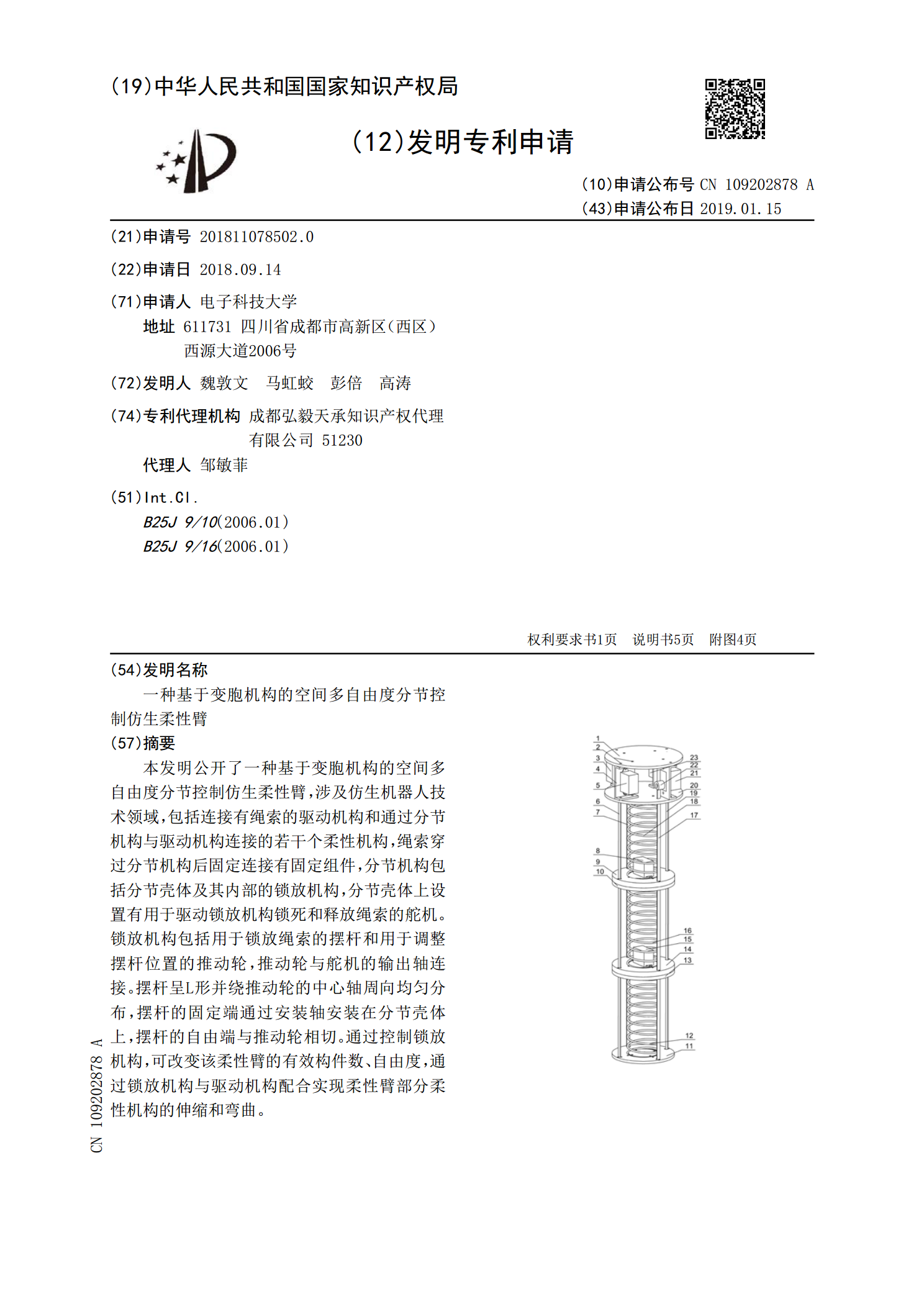
本发明公开了一种基于变胞机构的空间多自由度分节控制仿生柔性臂,涉及仿生机器人技术领域,包括连接有绳索的驱动机构和通过分节机构与驱动机构连接的若干个柔性机构,绳索穿过分节机构后固定连接有固定组件,分节机构包括分节壳体及其内部的锁放机构,分节壳体上设置有用于驱动锁放机构锁死和释放绳索的舵机。锁放机构包括用于锁放绳索的摆杆和用于调整摆杆位置的推动轮,推动轮与舵机的输出轴连接。摆杆呈L形并绕推动轮的中心轴周向均匀分布,摆杆的固定端通过安装轴安装在分节壳体上,摆杆的自由端与推动轮相切。通过控制锁放机构,可改变该柔性

多自由度欠驱动仿生机械手机构与造型设计.doc
多自由度欠驱动仿生机械手机构与造型设计由于战争、交通事故等原因,全世界的断臂、断手患者的数量日益增加,因此对假肢、假手的需求也不断的扩大。同时,在工业生产的特殊环境中,对复杂形状的物体进行自适应抓取,也需要这样的仿生机械手。但目前市场上接近真手功能的假手通常是机电结合的高科技产品,不但价格昂贵且维护费用高,不能满足广大患者的需要;而且由于人手的自由度多导致的驱动控制系统复杂的问题现在一直也没能得到很好解决。因此研究开发具有一般人手功能、便于维护而又成本较低的假手一直是研究者和工程师们的不懈追求。基于上述思