
一种基于变胞机构的空间多自由度分节控制仿生柔性臂.pdf

小凌****甜蜜

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于变胞机构的空间多自由度分节控制仿生柔性臂.pdf
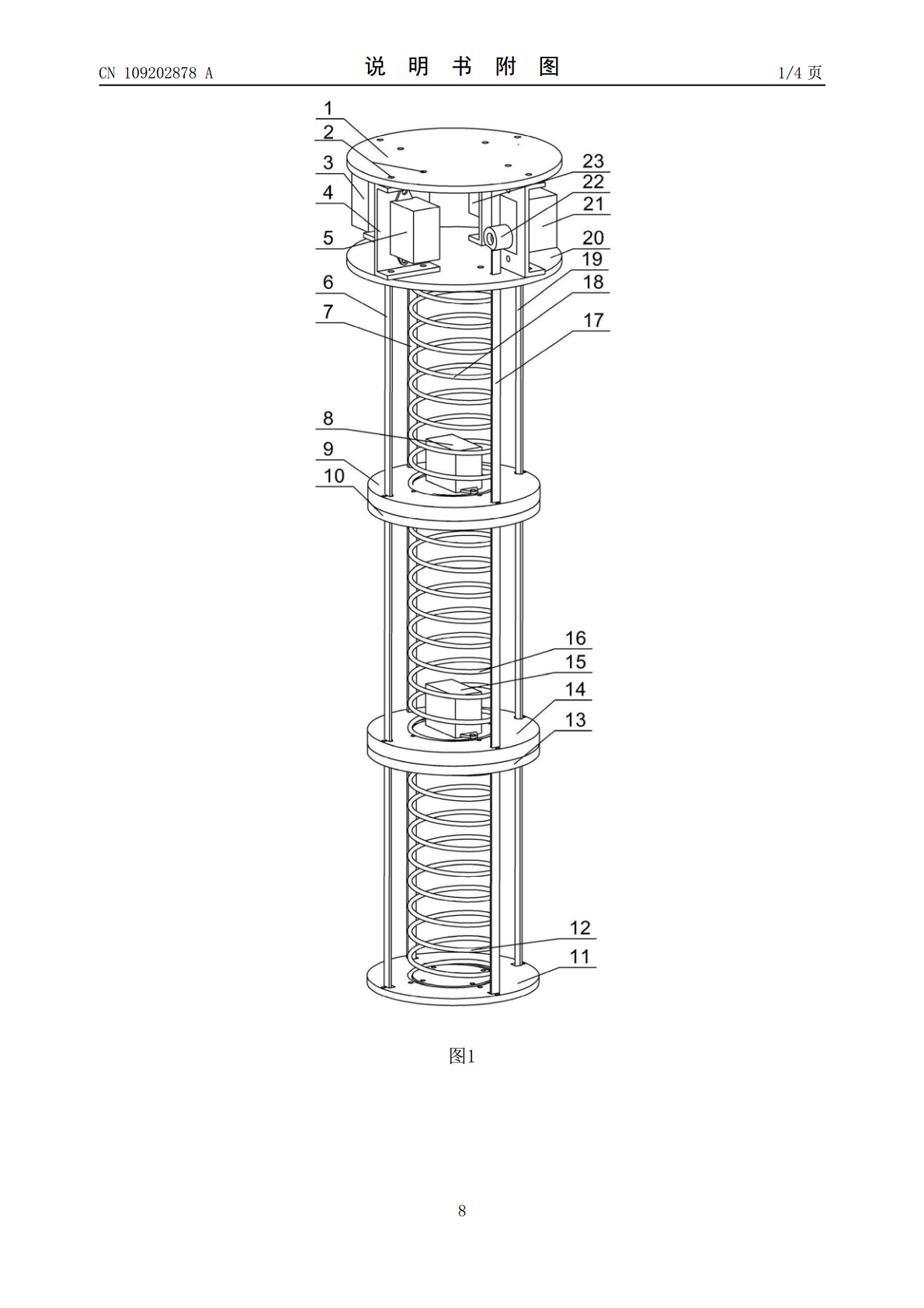
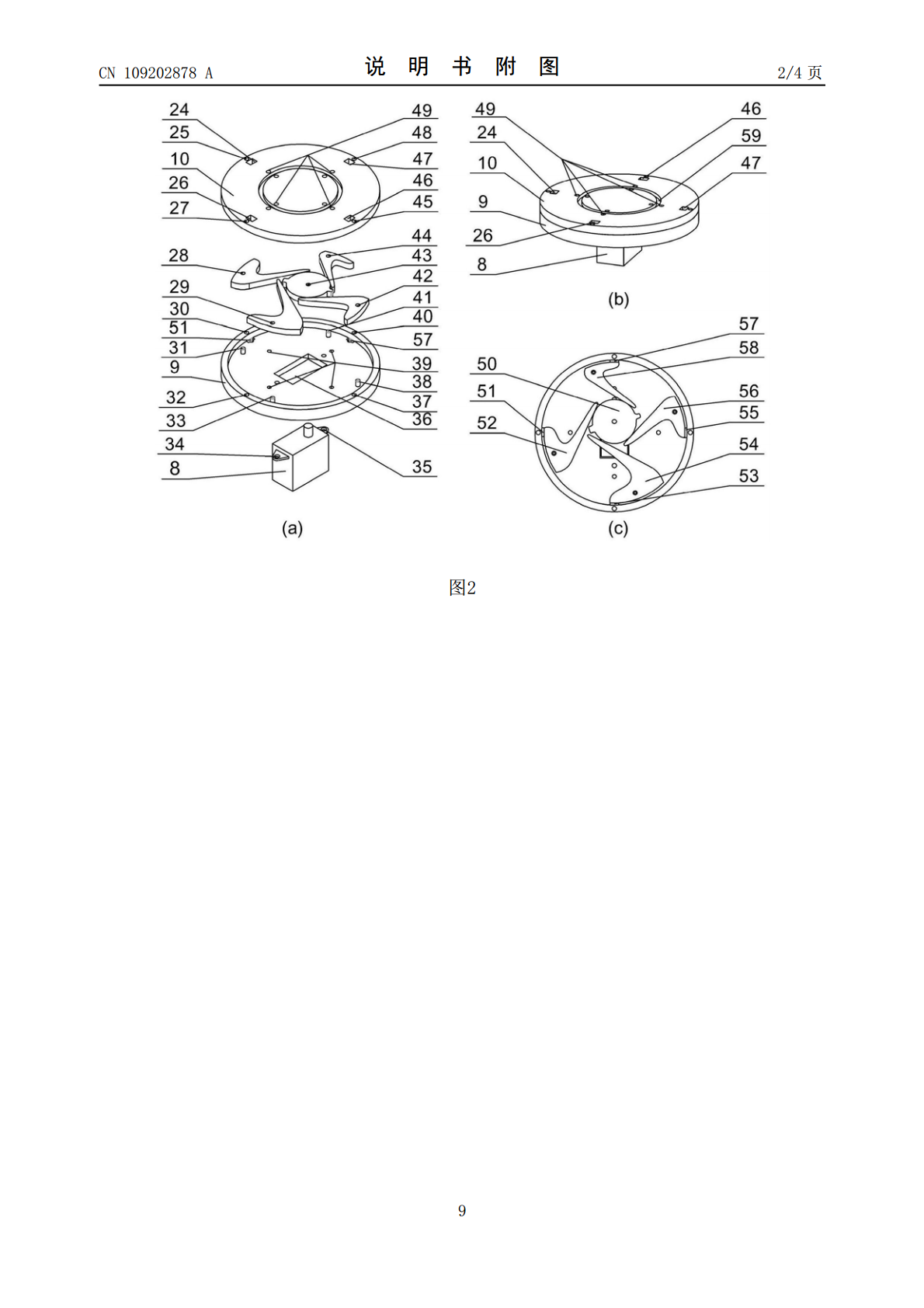
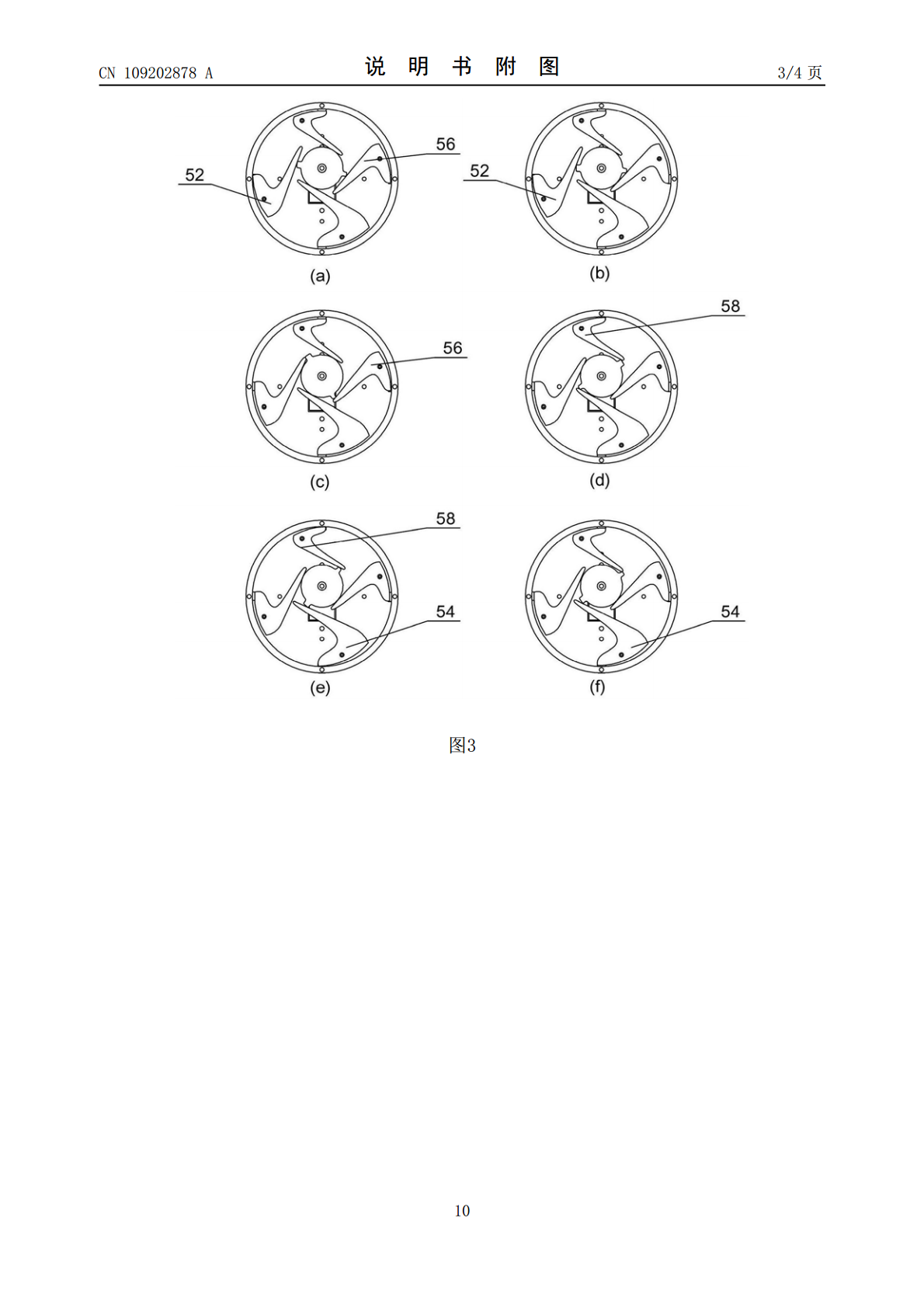
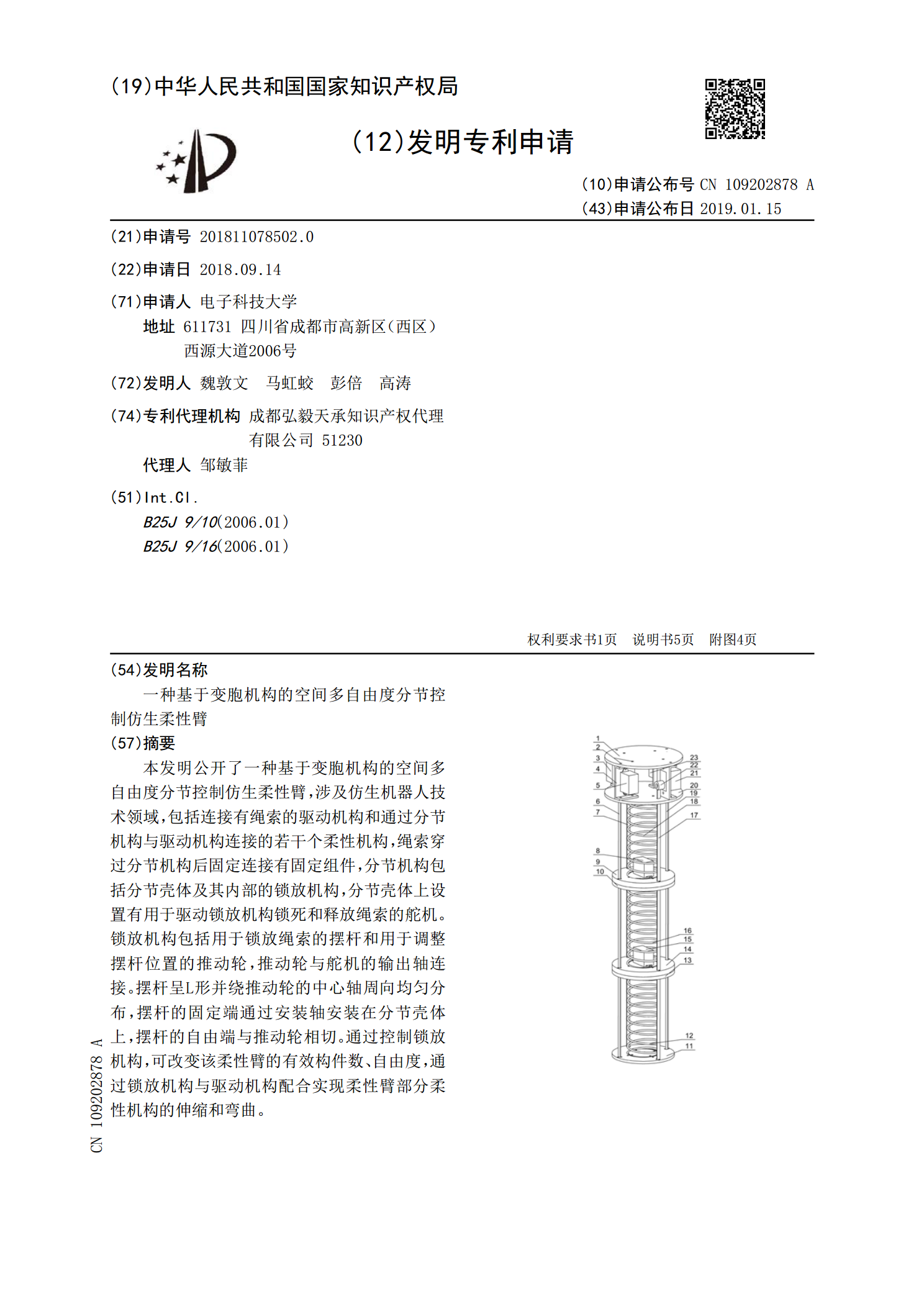
本发明公开了一种基于变胞机构的空间多自由度分节控制仿生柔性臂,涉及仿生机器人技术领域,包括连接有绳索的驱动机构和通过分节机构与驱动机构连接的若干个柔性机构,绳索穿过分节机构后固定连接有固定组件,分节机构包括分节壳体及其内部的锁放机构,分节壳体上设置有用于驱动锁放机构锁死和释放绳索的舵机。锁放机构包括用于锁放绳索的摆杆和用于调整摆杆位置的推动轮,推动轮与舵机的输出轴连接。摆杆呈L形并绕推动轮的中心轴周向均匀分布,摆杆的固定端通过安装轴安装在分节壳体上,摆杆的自由端与推动轮相切。通过控制锁放机构,可改变该柔性
一种多自由度柔性机械臂.pdf
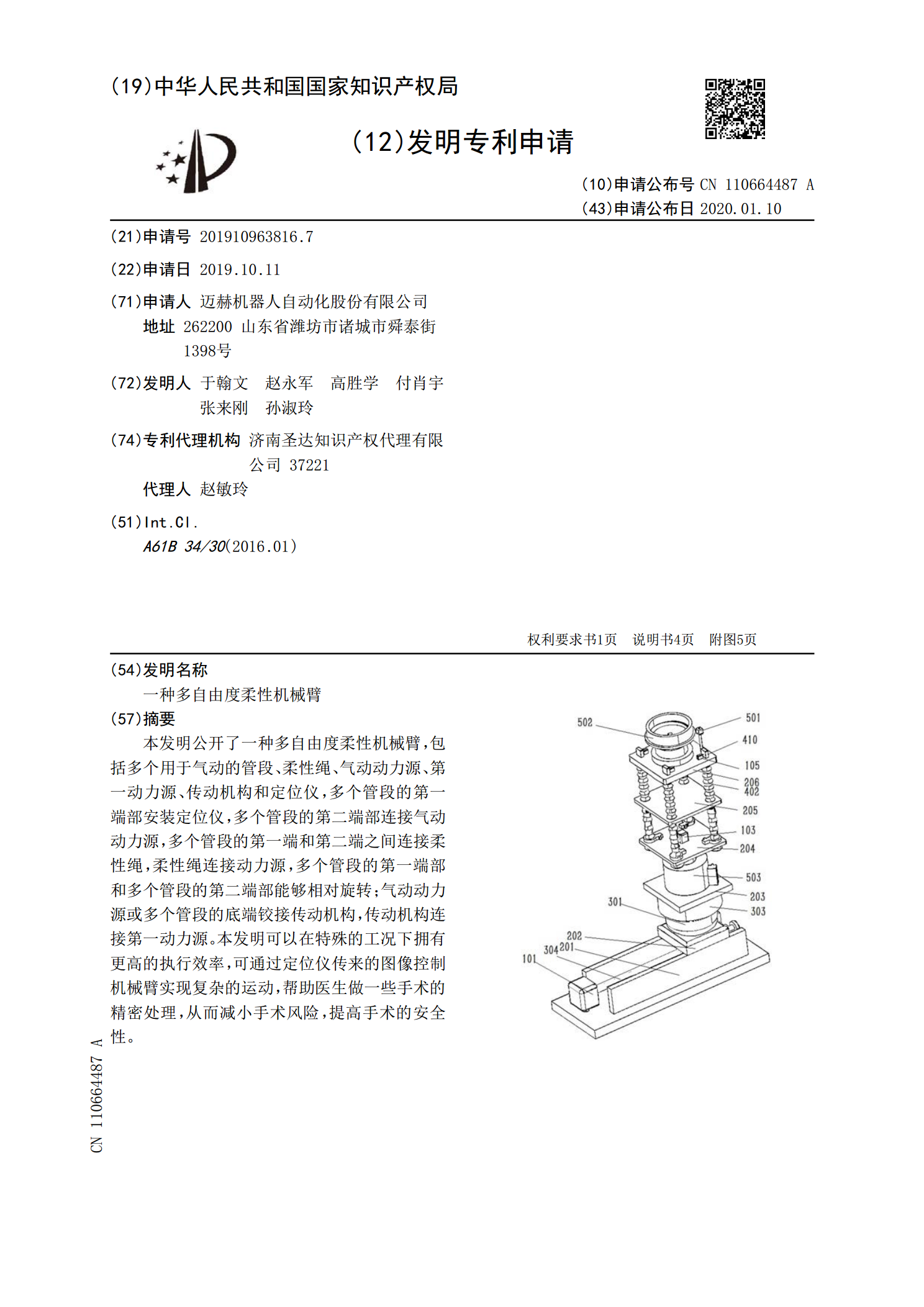
本发明公开了一种多自由度柔性机械臂,包括多个用于气动的管段、柔性绳、气动动力源、第一动力源、传动机构和定位仪,多个管段的第一端部安装定位仪,多个管段的第二端部连接气动动力源,多个管段的第一端和第二端之间连接柔性绳,柔性绳连接动力源,多个管段的第一端部和多个管段的第二端部能够相对旋转;气动动力源或多个管段的底端铰接传动机构,传动机构连接第一动力源。本发明可以在特殊的工况下拥有更高的执行效率,可通过定位仪传来的图像控制机械臂实现复杂的运动,帮助医生做一些手术的精密处理,从而减小手术风险,提高手术的安全性。
一种基于多级变胞机构的仿生柔顺抓取机械手.pdf
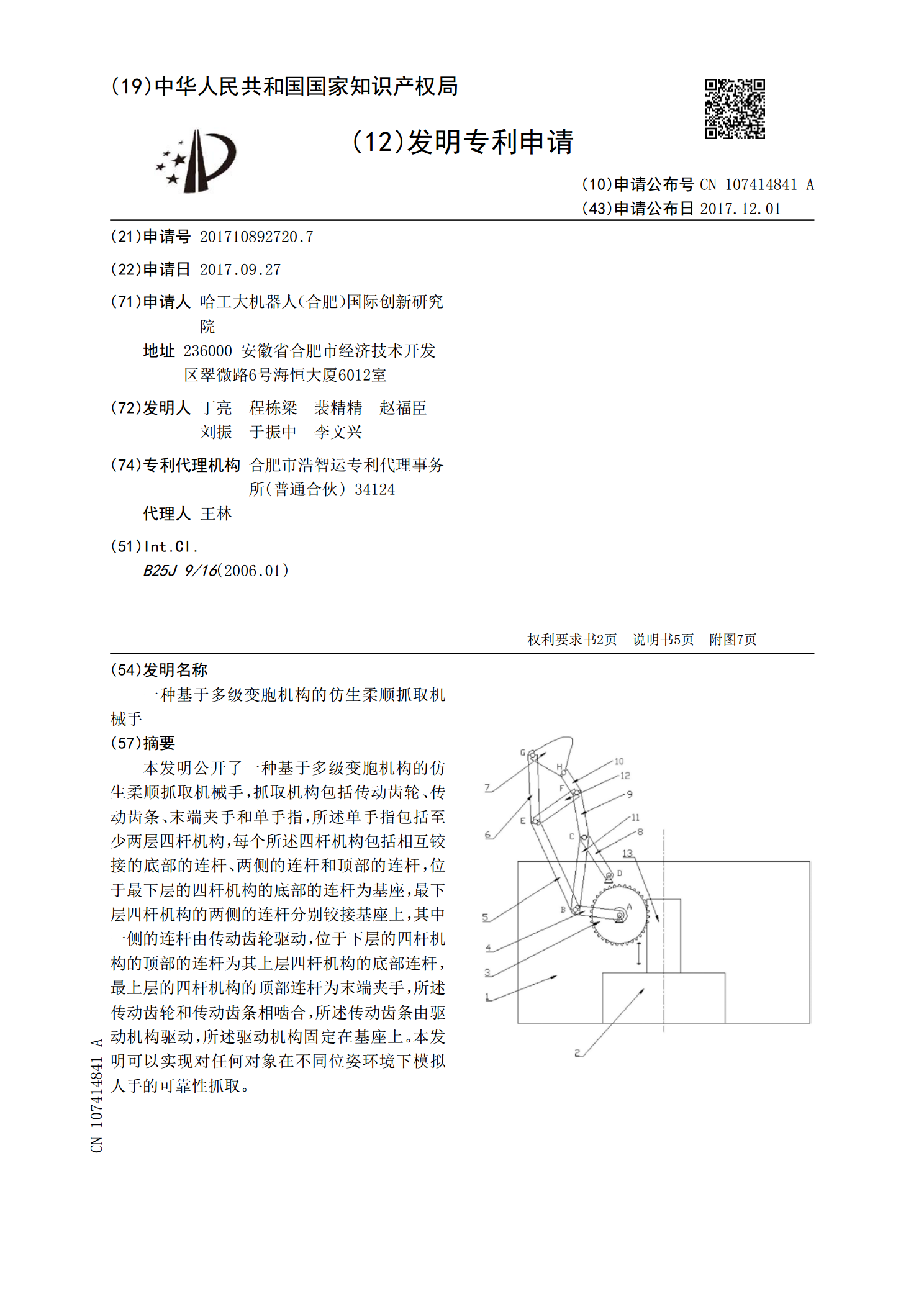
本发明公开了一种基于多级变胞机构的仿生柔顺抓取机械手,抓取机构包括传动齿轮、传动齿条、末端夹手和单手指,所述单手指包括至少两层四杆机构,每个所述四杆机构包括相互铰接的底部的连杆、两侧的连杆和顶部的连杆,位于最下层的四杆机构的底部的连杆为基座,最下层四杆机构的两侧的连杆分别铰接基座上,其中一侧的连杆由传动齿轮驱动,位于下层的四杆机构的顶部的连杆为其上层四杆机构的底部连杆,最上层的四杆机构的顶部连杆为末端夹手,所述传动齿轮和传动齿条相啮合,所述传动齿条由驱动机构驱动,所述驱动机构固定在基座上。本发明可以实现对
一种多自由度机械臂柔性控制方法和系统.pdf
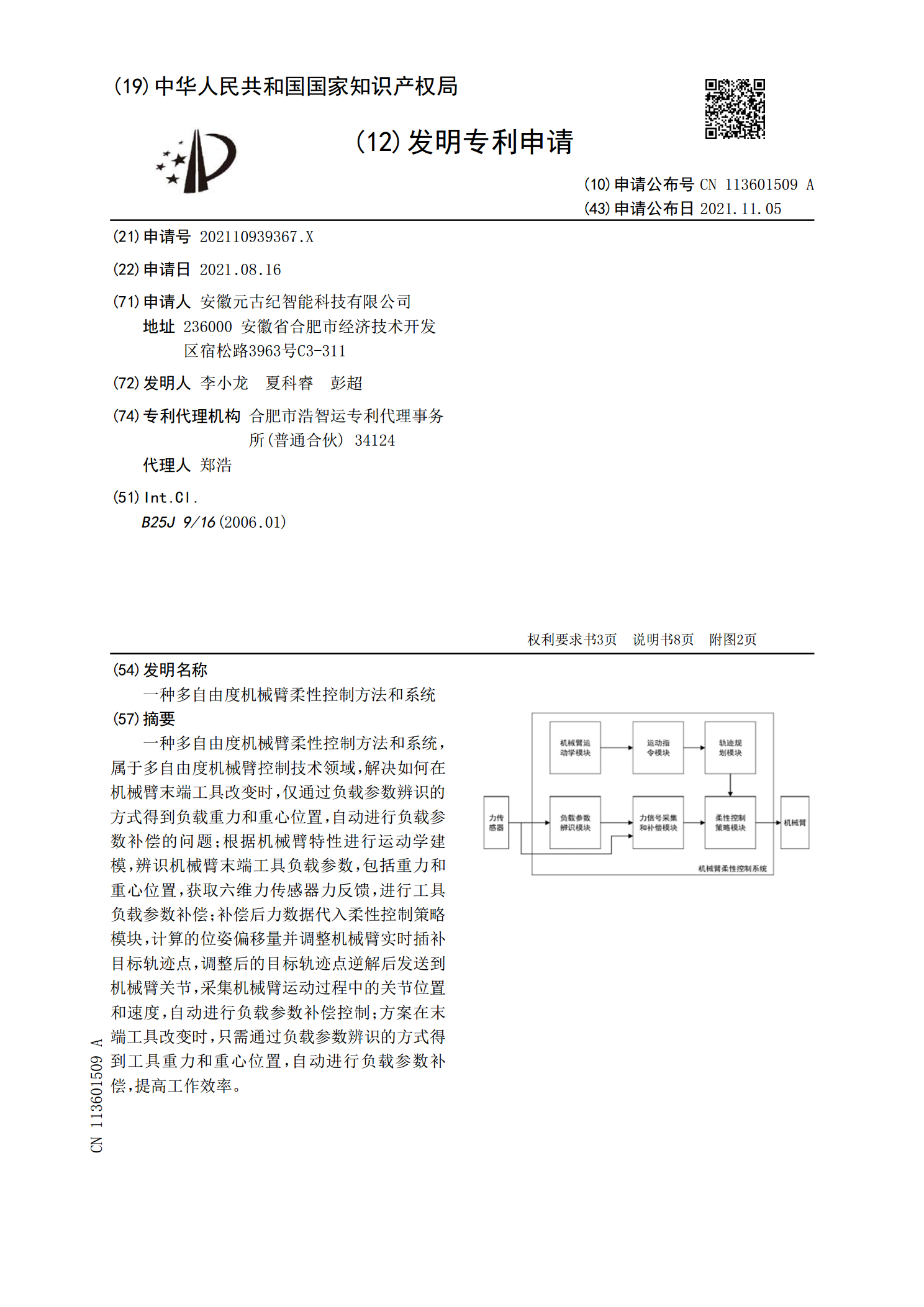
一种多自由度机械臂柔性控制方法和系统,属于多自由度机械臂控制技术领域,解决如何在机械臂末端工具改变时,仅通过负载参数辨识的方式得到负载重力和重心位置,自动进行负载参数补偿的问题;根据机械臂特性进行运动学建模,辨识机械臂末端工具负载参数,包括重力和重心位置,获取六维力传感器力反馈,进行工具负载参数补偿;补偿后力数据代入柔性控制策略模块,计算的位姿偏移量并调整机械臂实时插补目标轨迹点,调整后的目标轨迹点逆解后发送到机械臂关节,采集机械臂运动过程中的关节位置和速度,自动进行负载参数补偿控制;方案在末端工具改变时

一种多自由度仿生机构.pdf
一种多自由度仿生机构,包括连接机构本体和振动翼,振动翼与机构本体的转动臂相连接,连接机构本体包括齿轮驱动电机、主动齿轮、从动齿轮、导轨、转动轴、转动箱体和转动臂。从动齿轮通过从动齿轮直线轴承安装在转动轴上,主动齿轮与齿轮驱动电机连接,齿轮驱动电机带动主动齿轮旋转,从动齿轮与主动齿轮啮合且由主动齿轮带动旋转。而且从动齿轮上焊接了四根导轨,四根导轨与转动箱体相连。转动臂通过销钉与转动箱体连接,当从动齿轮转动时能够带动转动箱体的旋转,同时转动臂也跟着一起转动;主动齿轮和从动齿轮的连续性转动,能够驱动转动臂实现正