
多自由度欠驱动仿生机械手机构与造型设计.doc

努力****爱敏


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多自由度欠驱动仿生机械手机构与造型设计.doc
多自由度欠驱动仿生机械手机构与造型设计由于战争、交通事故等原因,全世界的断臂、断手患者的数量日益增加,因此对假肢、假手的需求也不断的扩大。同时,在工业生产的特殊环境中,对复杂形状的物体进行自适应抓取,也需要这样的仿生机械手。但目前市场上接近真手功能的假手通常是机电结合的高科技产品,不但价格昂贵且维护费用高,不能满足广大患者的需要;而且由于人手的自由度多导致的驱动控制系统复杂的问题现在一直也没能得到很好解决。因此研究开发具有一般人手功能、便于维护而又成本较低的假手一直是研究者和工程师们的不懈追求。基于上述思

多自由度欠驱动仿生机械手机构与造型设计.doc
多自由度欠驱动仿生机械手机构与造型设计由于战争、交通事故等原因,全世界的断臂、断手患者的数量日益增加,因此对假肢、假手的需求也不断的扩大。同时,在工业生产的特殊环境中,对复杂形状的物体进行自适应抓取,也需要这样的仿生机械手。但目前市场上接近真手功能的假手通常是机电结合的高科技产品,不但价格昂贵且维护费用高,不能满足广大患者的需要;而且由于人手的自由度多导致的驱动控制系统复杂的问题现在一直也没能得到很好解决。因此研究开发具有一般人手功能、便于维护而又成本较低的假手一直是研究者和工程师们的不懈追求。基于上述思

一种多自由度欠驱动机械手.pdf
本发明涉及一种多自由度欠驱动机械手,它包括手掌、拇指、中指、食指、无名指、小指、导绳轮、簧片、驱动腱等。拇指、食指、中指、无名指、小指等都包括3个指节,各个指节通过簧片连接,簧片通过螺钉与垫块一起固定在各个指节的背面。各指节由一个电机驱动,通过腱及导绳轮带动各指节弯曲。该发明具有高度拟人化、自适应性强、重量轻、体积小、结构紧凑、驱动元件少、自由度多、控制容易、加工简单等优点。
一种模块式多自由度欠驱动仿生假肢手.pdf
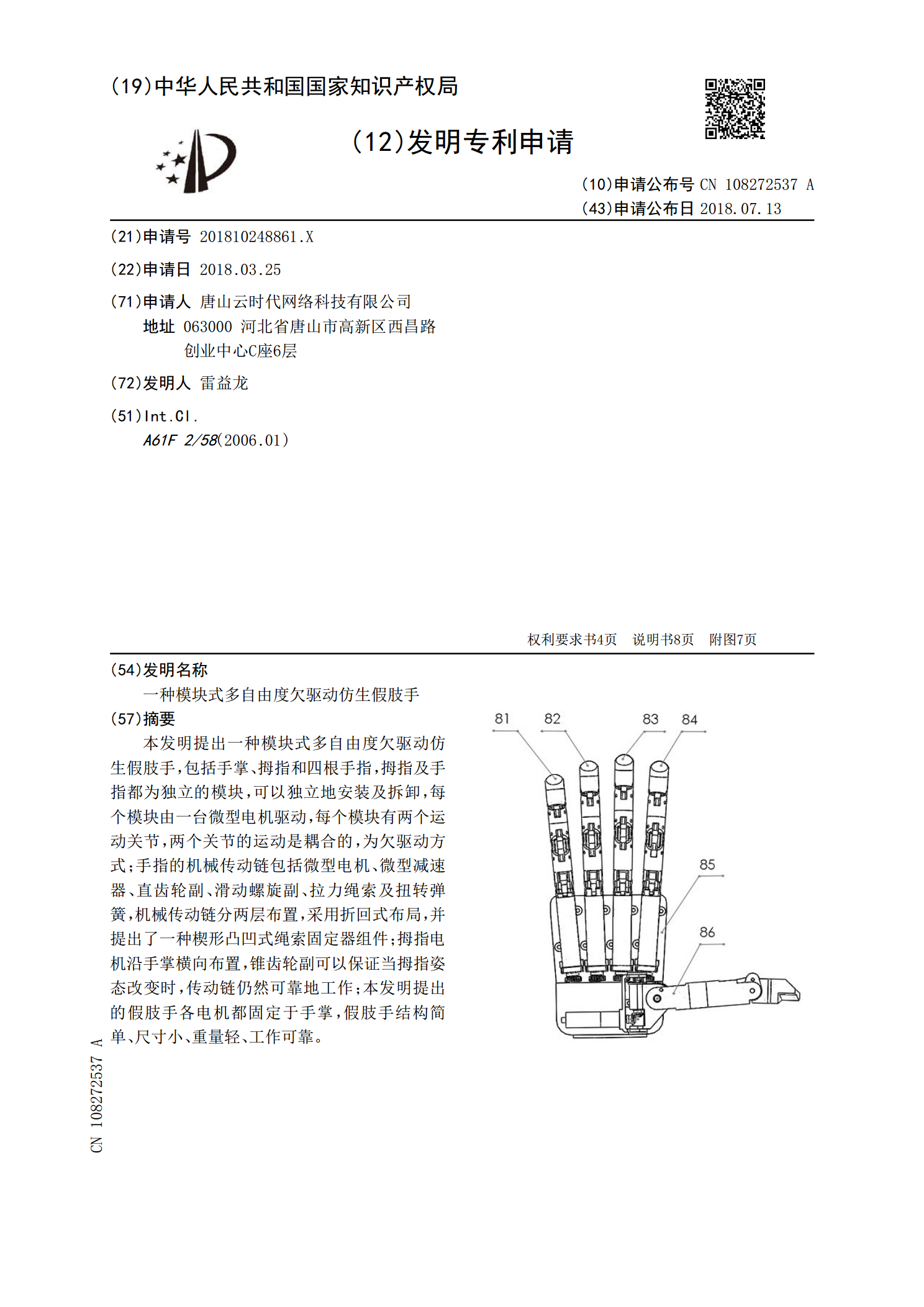
本发明提出一种模块式多自由度欠驱动仿生假肢手,包括手掌、拇指和四根手指,拇指及手指都为独立的模块,可以独立地安装及拆卸,每个模块由一台微型电机驱动,每个模块有两个运动关节,两个关节的运动是耦合的,为欠驱动方式;手指的机械传动链包括微型电机、微型减速器、直齿轮副、滑动螺旋副、拉力绳索及扭转弹簧,机械传动链分两层布置,采用折回式布局,并提出了一种楔形凸凹式绳索固定器组件;拇指电机沿手掌横向布置,锥齿轮副可以保证当拇指姿态改变时,传动链仍然可靠地工作;本发明提出的假肢手各电机都固定于手掌,假肢手结构简单、尺寸小

双关节轮式并联耦合欠驱动仿生机械手指装置.pdf
双关节轮式并联耦合欠驱动仿生机械手指装置,属于拟人机器人手技术领域,包括基座、电机、减速器、近关节轴、中部指段、远关节轴、末端指段、齿轮齿条耦合传动机构、轮式欠驱动传动机构和多个簧件。该装置采用电机、齿轮齿条耦合传动机构、轮式欠驱动传动机构和多个簧件综合实现了耦合抓取效果与自适应欠驱动抓取效果的融合,在手指没有碰到物体的时候,各关节以耦合模式同时转动,非常拟人化,同时也能够实现末端捏持动作;当手指碰到物体的时候,则以欠驱动方式转动,能够自动适应物体的外形实现抓取,有助于以握持方式抓取物体,抓取效果稳定;另