
基于三维机器视觉的智能家庭服务机器人.pdf

涵蓄****09

1/7

2/7
3/7
4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于三维机器视觉的智能家庭服务机器人.pdf
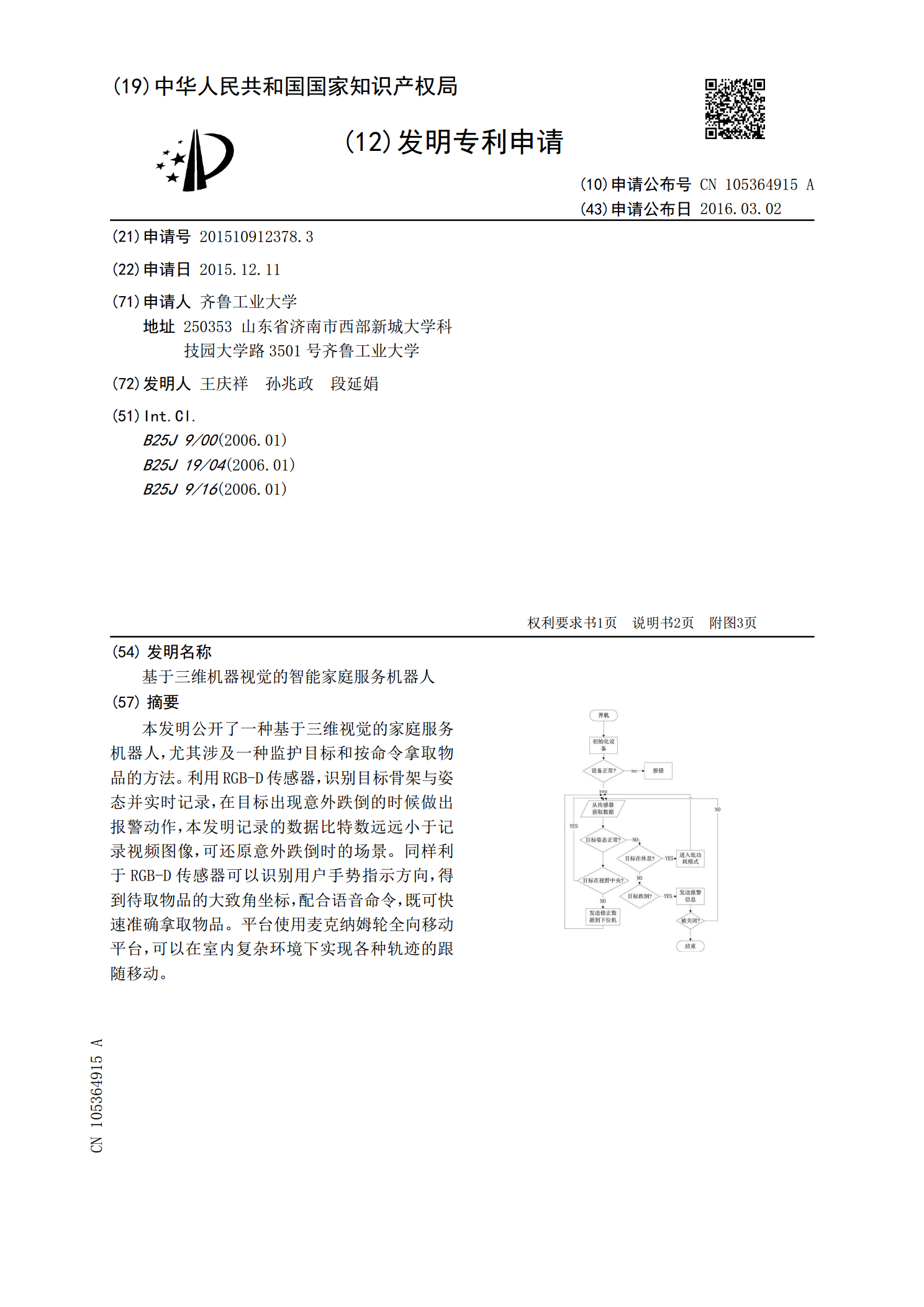
本发明公开了一种基于三维视觉的家庭服务机器人,尤其涉及一种监护目标和按命令拿取物品的方法。利用RGB-D传感器,识别目标骨架与姿态并实时记录,在目标出现意外跌倒的时候做出报警动作,本发明记录的数据比特数远远小于记录视频图像,可还原意外跌倒时的场景。同样利于RGB-D传感器可以识别用户手势指示方向,得到待取物品的大致角坐标,配合语音命令,既可快速准确拿取物品。平台使用麦克纳姆轮全向移动平台,可以在室内复杂环境下实现各种轨迹的跟随移动。
基于视觉的智能机器人.pdf
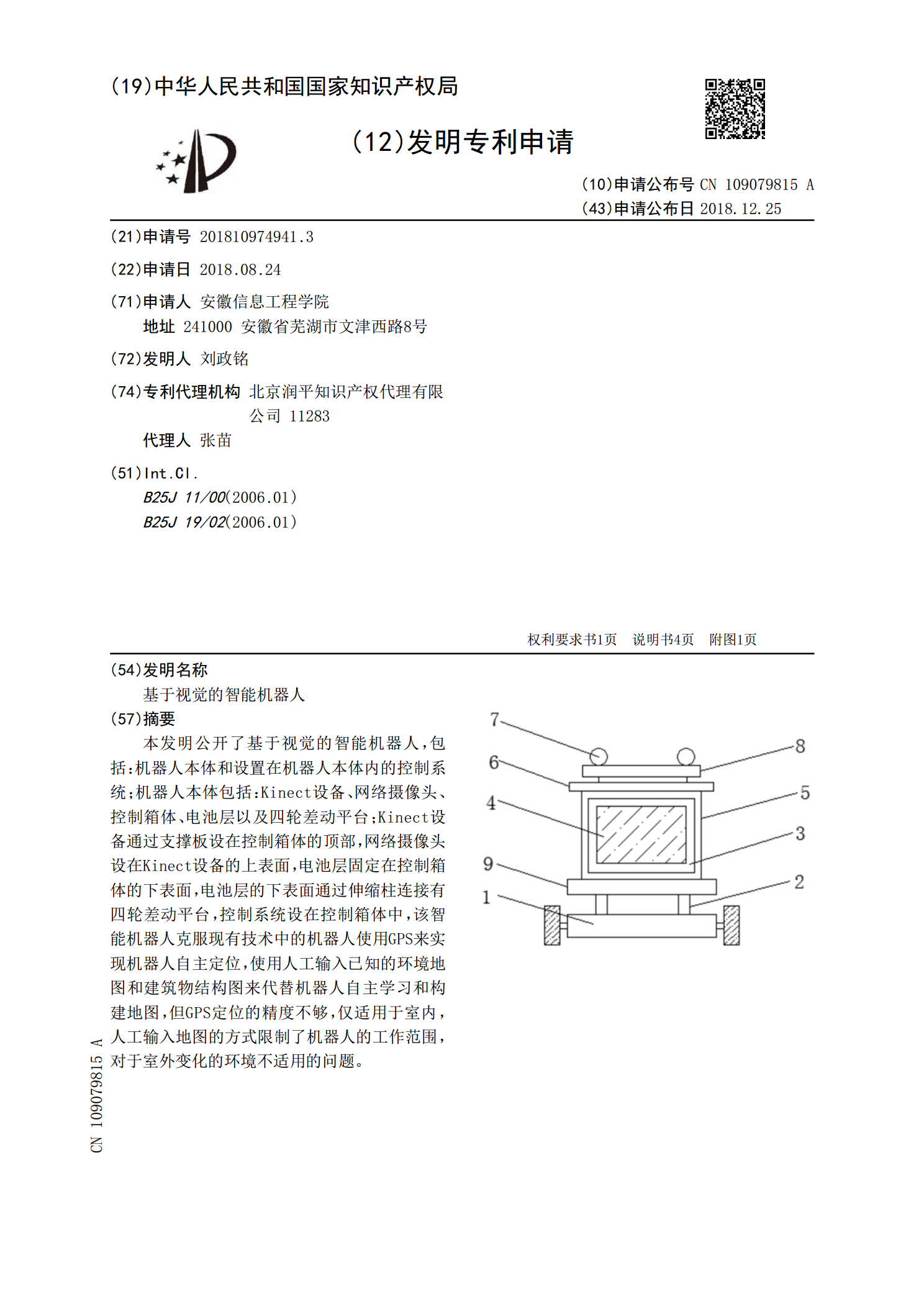
本发明公开了基于视觉的智能机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,电池层固定在控制箱体的下表面,电池层的下表面通过伸缩柱连接有四轮差动平台,控制系统设在控制箱体中,该智能机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,但GPS定位的精度不够,仅

基于视觉的智能针灸机器人.pdf
本发明提供基于视觉的智能针灸机器人,属于针灸机器人技术领域,以解决现有的智能针灸机器人需要人工辅助操作完成,不能完成自主拔针操作,从而降低了智能针灸机器人的实用性的问题,包括:床体;所述床体后侧通过支架安装有针灸机器人主体,且针灸机器人主体右端面安装有控制箱,并且控制箱与针灸机器人主体为普通电性连接。本发明通过图像获取装置、计算机控制箱的配合,针灸针滞留时间结束后,针灸机器人主体通过末端夹持机构和捻转机构完成自主拔针操作,拔针的方向、角度和速度都与刺入针灸针时保持一致,且整个拔针过程,由于无需人工辅助操作
基于视觉的智能按摩机器人.pdf
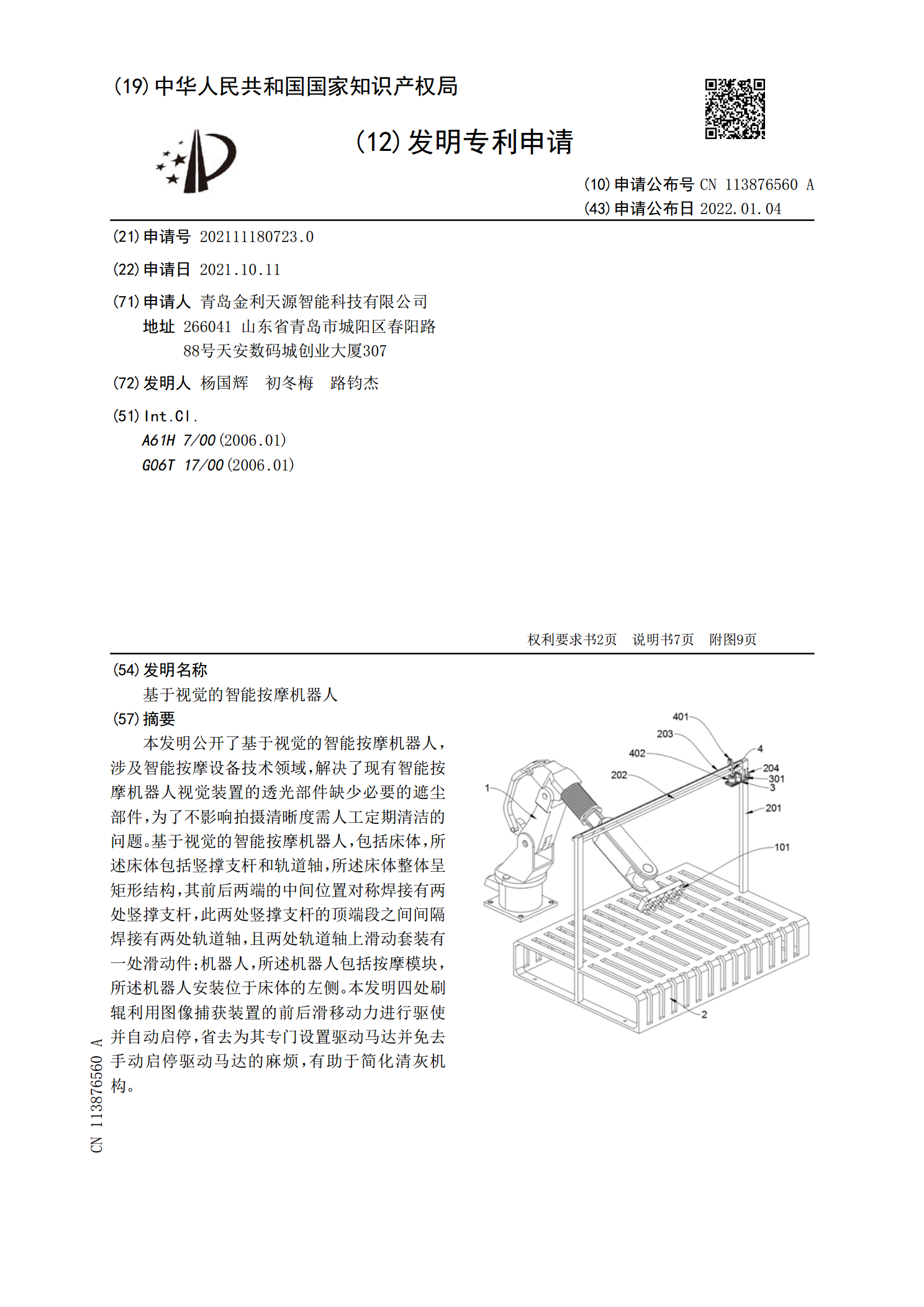
本发明公开了基于视觉的智能按摩机器人,涉及智能按摩设备技术领域,解决了现有智能按摩机器人视觉装置的透光部件缺少必要的遮尘部件,为了不影响拍摄清晰度需人工定期清洁的问题。基于视觉的智能按摩机器人,包括床体,所述床体包括竖撑支杆和轨道轴,所述床体整体呈矩形结构,其前后两端的中间位置对称焊接有两处竖撑支杆,此两处竖撑支杆的顶端段之间间隔焊接有两处轨道轴,且两处轨道轴上滑动套装有一处滑动件;机器人,所述机器人包括按摩模块,所述机器人安装位于床体的左侧。本发明四处刷辊利用图像捕获装置的前后滑移动力进行驱使并自动启停

基于机器视觉的家庭智能清理系统.pdf
本发明是一种家庭使用的可以自动识别地面垃圾并智能清理的家庭清理系统。该系统以DSP芯片为核心搭建嵌入式平台,采用红外摄像头摄取地面图像,采用无线雷达定位所要清理的垃圾的位置,采用小型吸尘器清洁地面,底部包括电动机,用来驱动车轮,前进到垃圾位置清理。本系统可以自动的清理地面废纸,果皮,塑料,线头,铁屑等垃圾,并可自动识别钥匙,钱币,笔等可能误落在地面的东西,系统清理面积大,工作及时,可一直保持家庭地面的干净,同时工作噪声小,节能,稳定可靠,是家庭和办公室的清理助手,可以极大的方便人们的生活。