
基于视觉的智能针灸机器人.pdf

永香****能手


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于视觉的智能针灸机器人.pdf
本发明提供基于视觉的智能针灸机器人,属于针灸机器人技术领域,以解决现有的智能针灸机器人需要人工辅助操作完成,不能完成自主拔针操作,从而降低了智能针灸机器人的实用性的问题,包括:床体;所述床体后侧通过支架安装有针灸机器人主体,且针灸机器人主体右端面安装有控制箱,并且控制箱与针灸机器人主体为普通电性连接。本发明通过图像获取装置、计算机控制箱的配合,针灸针滞留时间结束后,针灸机器人主体通过末端夹持机构和捻转机构完成自主拔针操作,拔针的方向、角度和速度都与刺入针灸针时保持一致,且整个拔针过程,由于无需人工辅助操作
基于视觉的智能机器人.pdf
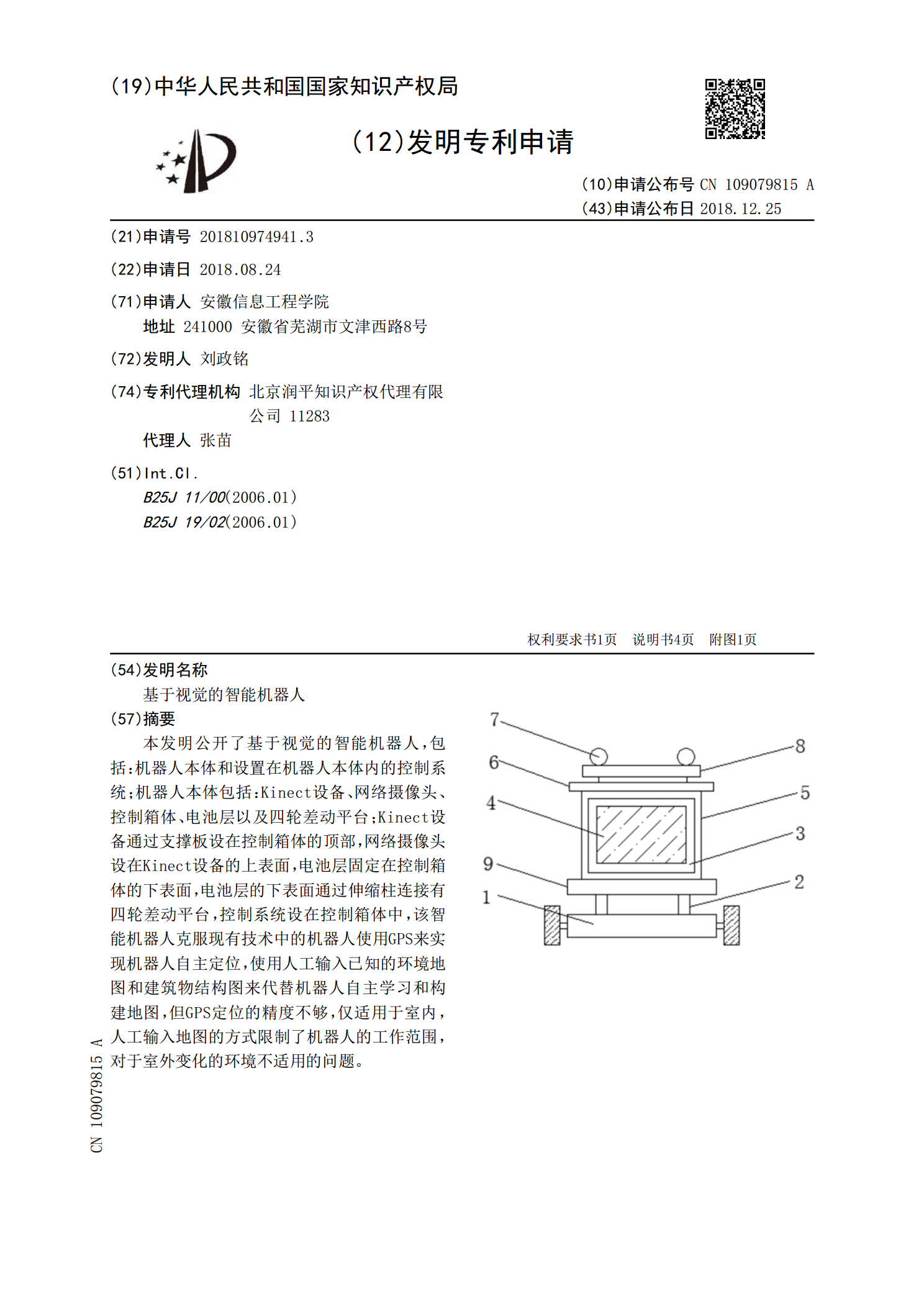
本发明公开了基于视觉的智能机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,电池层固定在控制箱体的下表面,电池层的下表面通过伸缩柱连接有四轮差动平台,控制系统设在控制箱体中,该智能机器人克服现有技术中的机器人使用GPS来实现机器人自主定位,使用人工输入已知的环境地图和建筑物结构图来代替机器人自主学习和构建地图,但GPS定位的精度不够,仅
基于视觉的智能按摩机器人.pdf
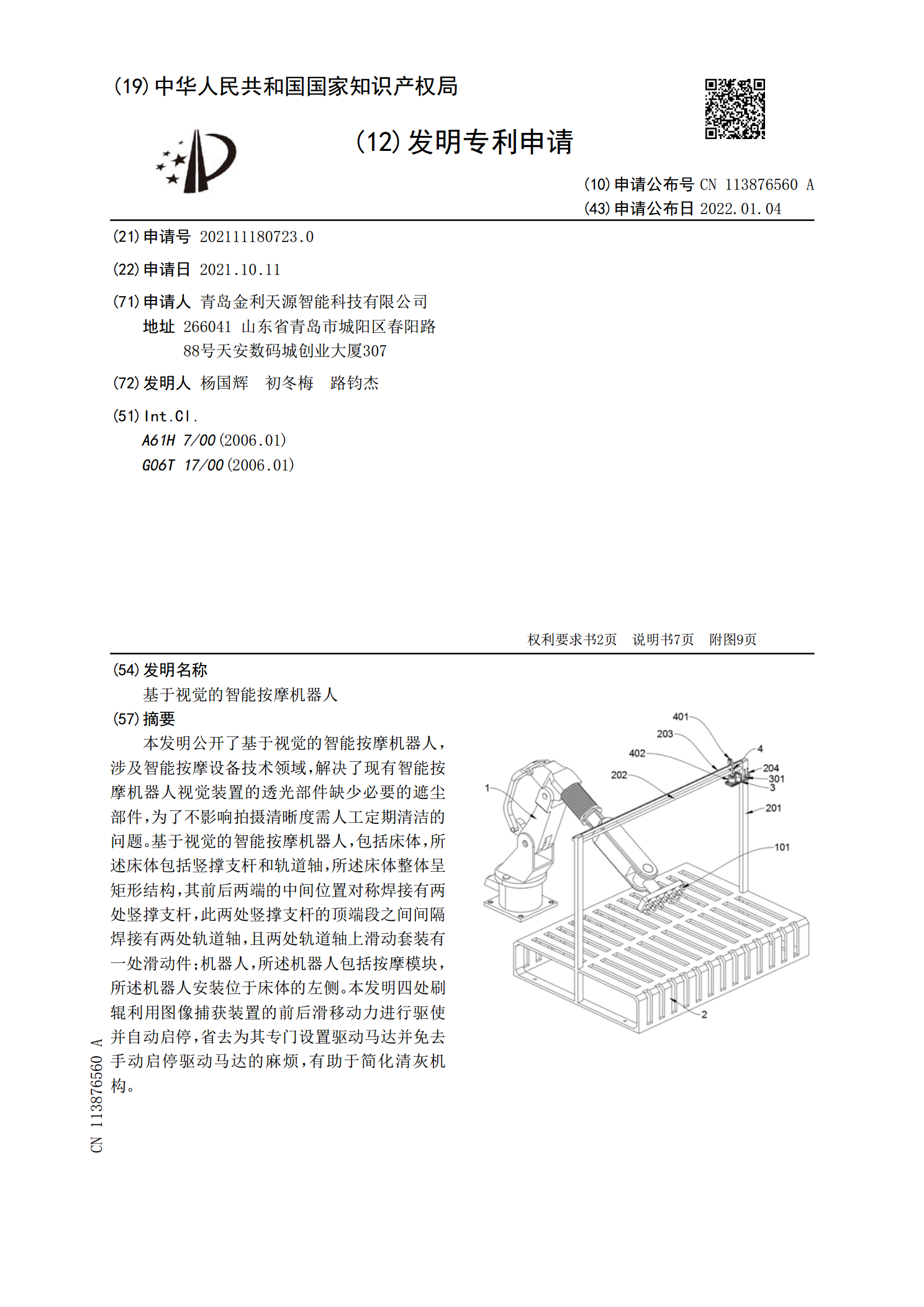
本发明公开了基于视觉的智能按摩机器人,涉及智能按摩设备技术领域,解决了现有智能按摩机器人视觉装置的透光部件缺少必要的遮尘部件,为了不影响拍摄清晰度需人工定期清洁的问题。基于视觉的智能按摩机器人,包括床体,所述床体包括竖撑支杆和轨道轴,所述床体整体呈矩形结构,其前后两端的中间位置对称焊接有两处竖撑支杆,此两处竖撑支杆的顶端段之间间隔焊接有两处轨道轴,且两处轨道轴上滑动套装有一处滑动件;机器人,所述机器人包括按摩模块,所述机器人安装位于床体的左侧。本发明四处刷辊利用图像捕获装置的前后滑移动力进行驱使并自动启停

基于视觉的工业机器人智能分拣工作站设计.docx
基于视觉的工业机器人智能分拣工作站设计1.视觉智能分拣工作站概述随着工业自动化和智能化的发展,基于视觉的智能分拣工作站在各行各业中得到了广泛的应用。本文档将详细介绍一种基于视觉的工业机器人智能分拣工作站的设计,旨在为读者提供一个全面、系统的设计方案,以满足不同行业和场景下的分拣需求。在设计过程中,我们充分考虑了系统的稳定性、可靠性和易用性,力求为用户提供一种高效、实用的智能分拣解决方案。我们还针对不同行业的特点和需求,提供了多种可选的视觉识别算法和控制策略,以满足客户的个性化定制需求。1.1背景与意义随着
一种基于视觉的机器人智能引导系统及方法.pdf
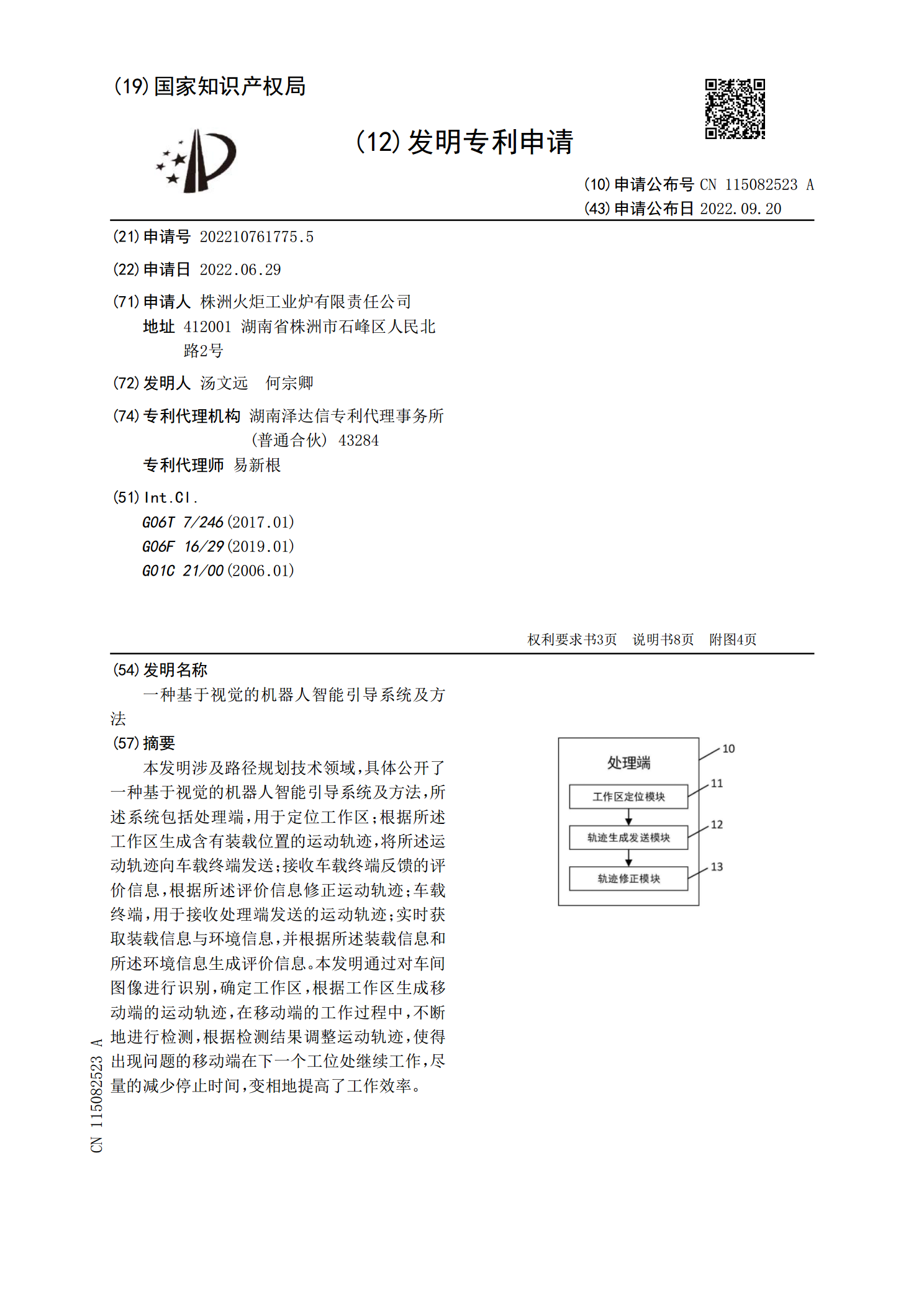
本发明涉及路径规划技术领域,具体公开了一种基于视觉的机器人智能引导系统及方法,所述系统包括处理端,用于定位工作区;根据所述工作区生成含有装载位置的运动轨迹,将所述运动轨迹向车载终端发送;接收车载终端反馈的评价信息,根据所述评价信息修正运动轨迹;车载终端,用于接收处理端发送的运动轨迹;实时获取装载信息与环境信息,并根据所述装载信息和所述环境信息生成评价信息。本发明通过对车间图像进行识别,确定工作区,根据工作区生成移动端的运动轨迹,在移动端的工作过程中,不断地进行检测,根据检测结果调整运动轨迹,使得出现问题的