
一种差速驱动小车曲线行走方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种差速驱动小车曲线行走方法.docx
一种差速驱动小车曲线行走方法差速驱动是一种常用于小车和机器人行走的方法,它可以实现曲线行走和转弯动作。这种方法通过控制左右两个电机的速度差异来实现车辆的转向效果。在本论文中,我们将介绍差速驱动小车曲线行走方法的原理、控制方法和实际应用。一、差速驱动小车的原理差速驱动小车的原理基于两辆车轮的速度差异来实现转弯动作。当左右两个电机的速度相等时,小车直线行走;当左右两个电机的速度有差异时,小车就会转向。具体而言,差速驱动小车通过控制电机转速来实现转向效果。当需要小车向左转时,右侧电机的转速会比左侧电机的转速更快
一种差速驱动舵轮.pdf
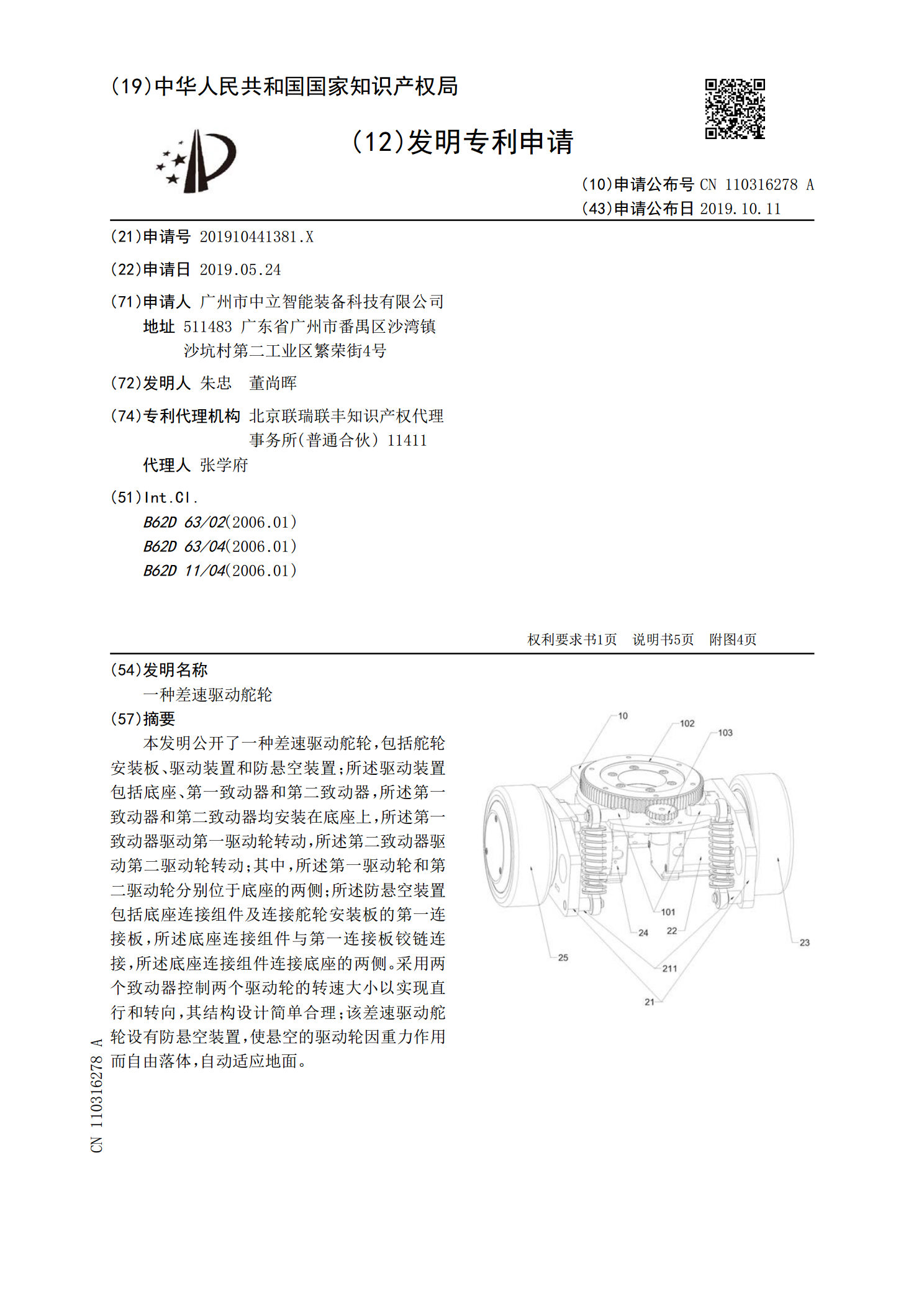
本发明公开了一种差速驱动舵轮,包括舵轮安装板、驱动装置和防悬空装置;所述驱动装置包括底座、第一致动器和第二致动器,所述第一致动器和第二致动器均安装在底座上,所述第一致动器驱动第一驱动轮转动,所述第二致动器驱动第二驱动轮转动;其中,所述第一驱动轮和第二驱动轮分别位于底座的两侧;所述防悬空装置包括底座连接组件及连接舵轮安装板的第一连接板,所述底座连接组件与第一连接板铰链连接,所述底座连接组件连接底座的两侧。采用两个致动器控制两个驱动轮的转速大小以实现直行和转向,其结构设计简单合理;该差速驱动舵轮设有防悬空装置
一种差速驱动装置.pdf
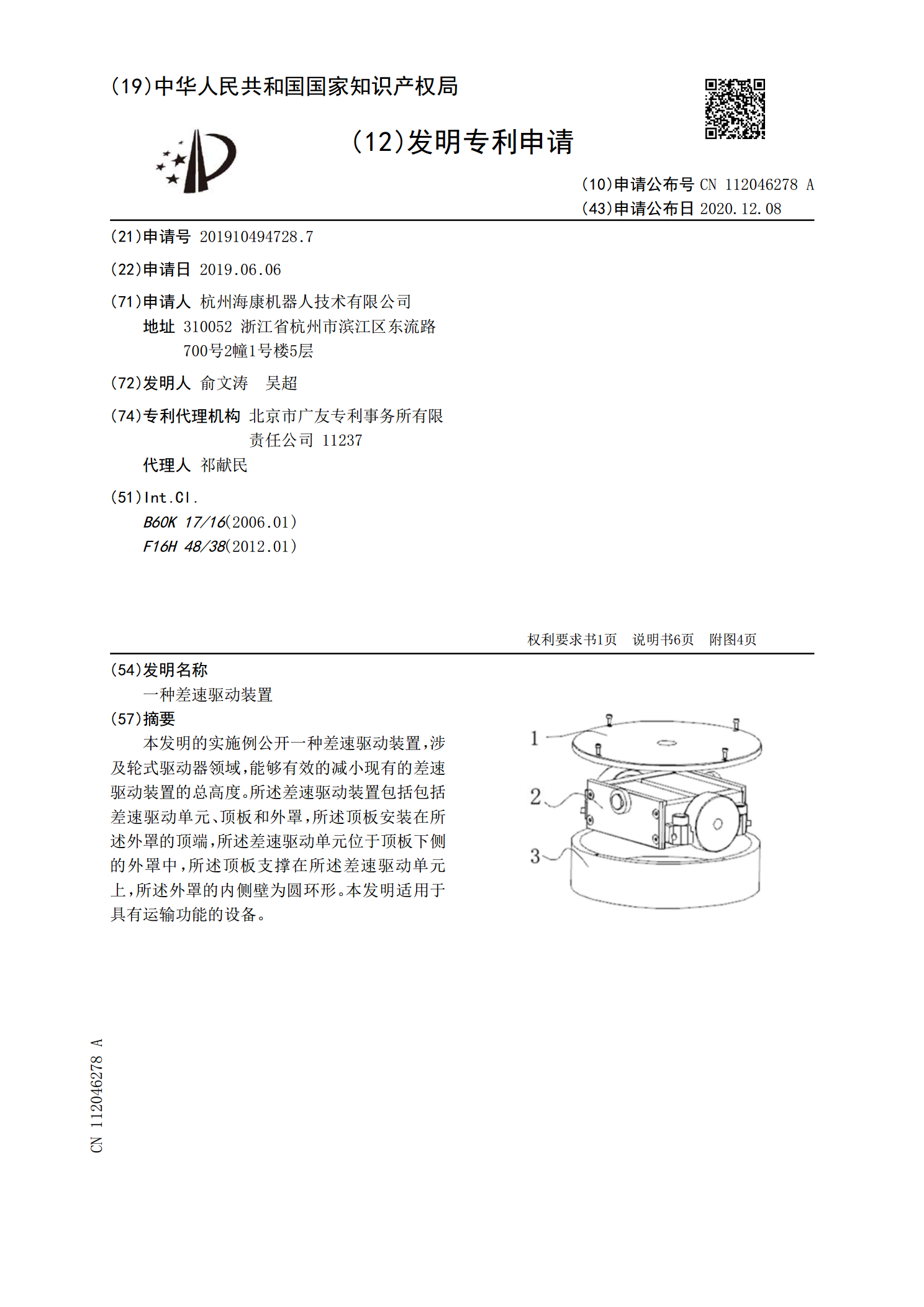
本发明的实施例公开一种差速驱动装置,涉及轮式驱动器领域,能够有效的减小现有的差速驱动装置的总高度。所述差速驱动装置包括包括差速驱动单元、顶板和外罩,所述顶板安装在所述外罩的顶端,所述差速驱动单元位于顶板下侧的外罩中,所述顶板支撑在所述差速驱动单元上,所述外罩的内侧壁为圆环形。本发明适用于具有运输功能的设备。
一种差速驱动装置.pdf
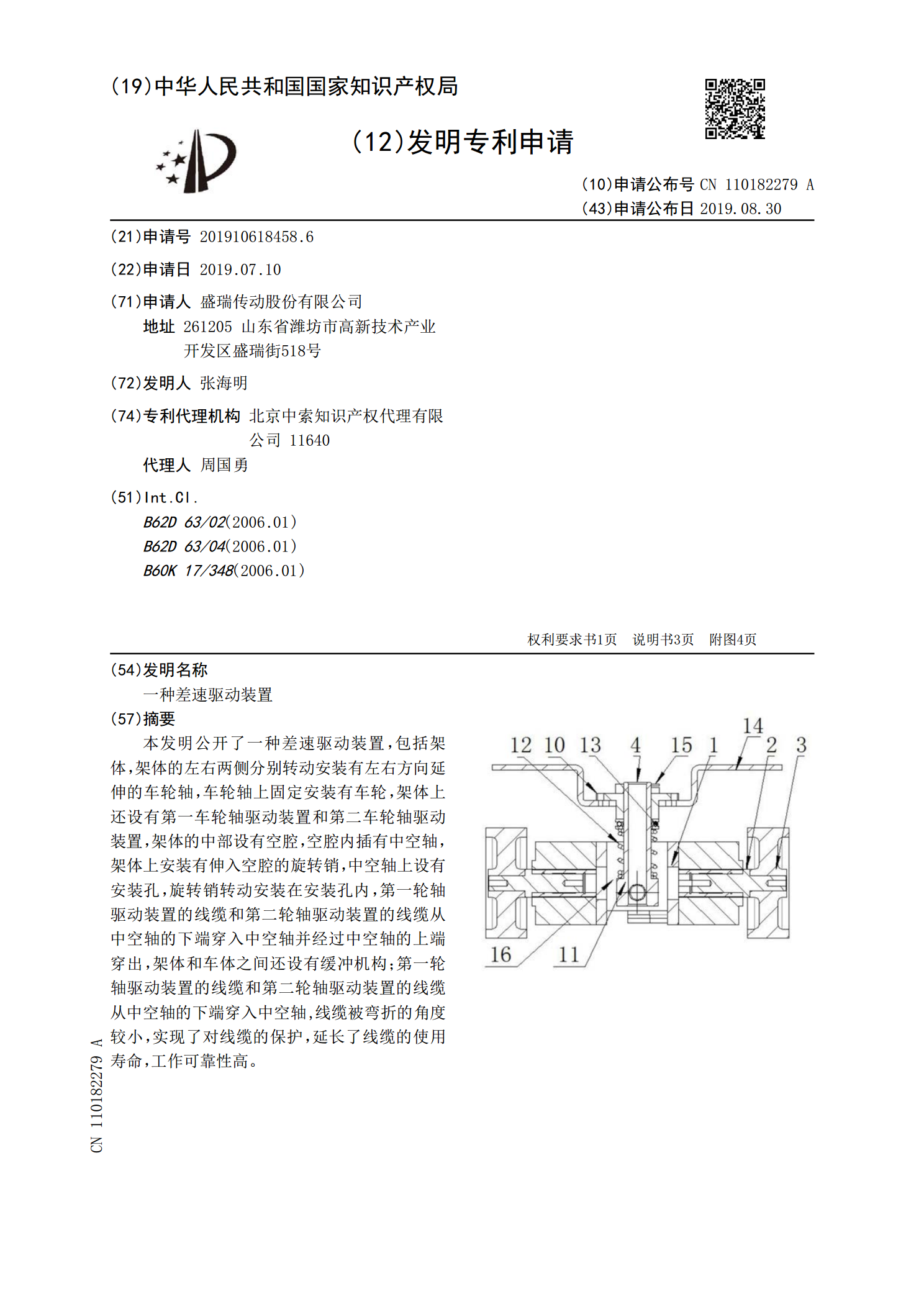
本发明公开了一种差速驱动装置,包括架体,架体的左右两侧分别转动安装有左右方向延伸的车轮轴,车轮轴上固定安装有车轮,架体上还设有第一车轮轴驱动装置和第二车轮轴驱动装置,架体的中部设有空腔,空腔内插有中空轴,架体上安装有伸入空腔的旋转销,中空轴上设有安装孔,旋转销转动安装在安装孔内,第一轮轴驱动装置的线缆和第二轮轴驱动装置的线缆从中空轴的下端穿入中空轴并经过中空轴的上端穿出,架体和车体之间还设有缓冲机构;第一轮轴驱动装置的线缆和第二轮轴驱动装置的线缆从中空轴的下端穿入中空轴,线缆被弯折的角度较小,实现了对线缆

可曲线行走的益智小车.pdf
本发明提供一种可曲线行走的益智小车,包括小车底板、前滚动轮、两后滚动轮,所述小车底板的后端上一斯特林发动机,该斯特林发动机连接一驱动齿轮,所述驱动齿轮与一传动齿轮啮合,所述传动齿轮套设在一齿轮传动轴上,所述齿轮传动轴的两端均设有一动力轮轴,两动力轮轴的端部均设有一行走轮,所述传动齿轮还与第一齿轮啮合,所述第一齿轮与第二齿轮同轴安装,所述第二齿轮与第三齿轮啮合,所述第三齿轮与凸轮同轴安装,所述凸轮通过齿条与转向齿轮连接。本益智小车在无碳小车的结构基础上进行改变,设置斯特林发动机,结构较为复杂,改变现有单一的