
绳索驱动并联机器人的静力学优化与机构设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

绳索驱动并联机器人的静力学优化与机构设计.docx
绳索驱动并联机器人的静力学优化与机构设计随着机器人技术的不断发展,串联机器人的应用范围越来越广泛。众所周知,串联机器人在某些场合下具有较强的灵活性和精密度,但是其缺陷也是很明显的,比如占用的空间较大,容易出现过载等问题。因此,为了弥补串联机器人的缺陷,并联机器人的逐渐走红也就不难理解了。并联机器人的空间占用较小,可以在狭小的空间内工作,达到较高的精度,因此被广泛应用于医疗、食品加工以及组装等领域。绳索驱动并联机器人是一种常见的并联机器人,它包含了一个固定的平台、多个可活动的夹爪和多根固定在平台上的绳索。由
绳索驱动智能平仓并联机器人.pdf
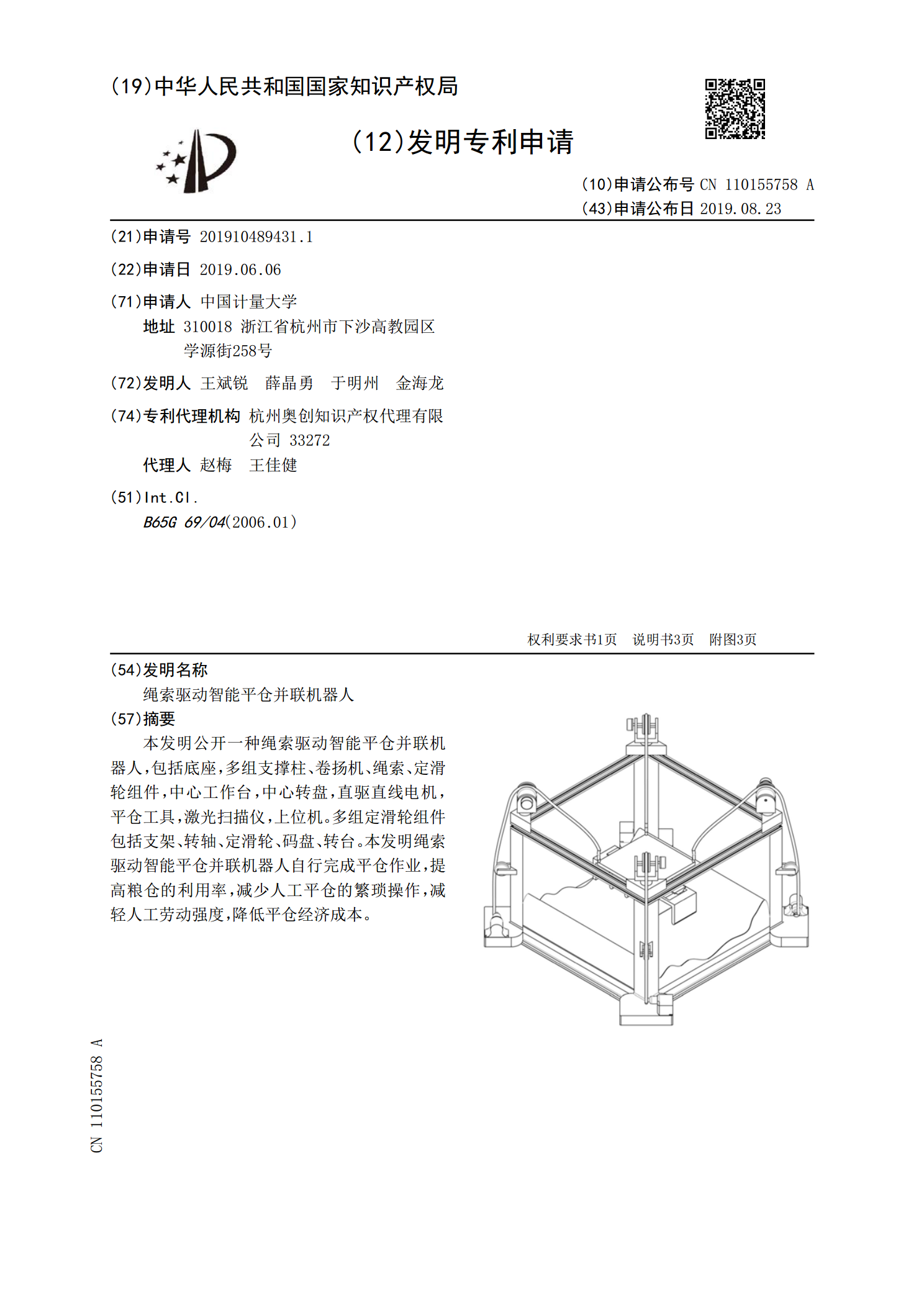
本发明公开一种绳索驱动智能平仓并联机器人,包括底座,多组支撑柱、卷扬机、绳索、定滑轮组件,中心工作台,中心转盘,直驱直线电机,平仓工具,激光扫描仪,上位机。多组定滑轮组件包括支架、转轴、定滑轮、码盘、转台。本发明绳索驱动智能平仓并联机器人自行完成平仓作业,提高粮仓的利用率,减少人工平仓的繁琐操作,减轻人工劳动强度,降低平仓经济成本。

冗余驱动Tricept并联机构的驱动优化.docx
冗余驱动Tricept并联机构的驱动优化Abstract:TheredundantTriceptparallelmechanismhasattractedtheattentionofmanyresearchersbecauseofitshighprecisionandstability.Inordertoimproveitsdriveperformance,weanalyzedtheexistingdrivemodesandoptimizedthedrivesystemoftheredundantTric

绳索驱动并联机器人的静态与动态特性分析的开题报告.docx
绳索驱动并联机器人的静态与动态特性分析的开题报告一、研究背景和意义随着社会的快速发展和工业自动化的普及,机器人技术在各个领域得到了广泛应用,其应用领域也越来越广泛,例如在制造业、医疗、物流等方面都有着重要的应用。机器人的发展趋势从单独的高性能机器人向模块化、多机器人系统发展,而并联机器人由于其结构简单、运动平稳、灵敏度高等优点,越来越成为研究热点。绳索驱动并联机器人是一种特殊类型的机器人,其驱动方式独特,具有很高的运动精度和高负载能力,被广泛应用于建筑物维护、极地勘探、空中救援以及物资输送等领域。本文主要

一种绳索驱动装置及绳驱并联机器人.pdf
本发明涉及机器人技术领域,公开了一种绳索驱动装置以及并联绳驱机器人。本发明的绳索驱动装置包括主体框架、固设于所述主体框架上的驱动装置、与所述驱动装置连接并同步转动的丝杆与铰轮、与所述丝杆螺纹连接的导绳滑块以及一端固定设于所述铰轮的上的控制绳索;其中,所述铰轮上设有供所述控制绳索绕卷的螺纹槽,所述导绳滑块上设有第一导绳滑轮,所述第一导绳滑轮将所述控制绳索张紧并使所述控制绳索定向绕入所述螺纹槽内。本发明的并联绳驱机器人包括机器人主体以及固设于机器人主体上的绳索驱动装置。本发明的绳索驱动装置以及并联绳驱机器人能