
绳索驱动并联机器人的静态与动态特性分析的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

绳索驱动并联机器人的静态与动态特性分析的开题报告.docx
绳索驱动并联机器人的静态与动态特性分析的开题报告一、研究背景和意义随着社会的快速发展和工业自动化的普及,机器人技术在各个领域得到了广泛应用,其应用领域也越来越广泛,例如在制造业、医疗、物流等方面都有着重要的应用。机器人的发展趋势从单独的高性能机器人向模块化、多机器人系统发展,而并联机器人由于其结构简单、运动平稳、灵敏度高等优点,越来越成为研究热点。绳索驱动并联机器人是一种特殊类型的机器人,其驱动方式独特,具有很高的运动精度和高负载能力,被广泛应用于建筑物维护、极地勘探、空中救援以及物资输送等领域。本文主要

绳索驱动并联机器人的静态与动态特性分析的任务书.docx
绳索驱动并联机器人的静态与动态特性分析的任务书一、任务背景和意义随着机器人技术的不断发展和应用,越来越多的机器人被广泛应用于生产制造、服务业、医疗卫生、农业等领域。并联机器人作为一种高精度、高刚度、高速度的机器人系统,其在工业自动化、航空航天等领域具有广泛的应用前景。然而,纯机械式的并联机器人受到传动部件、动力部件的限制,仍然存在安全性、精度和动态稳定性等问题。因此,探讨机械式并联机器人的静态与动态特性分析对于实现机器人精度和稳定性的提高具有重要意义。二、研究目标和内容本论文的研究目标是分析绳索驱动并联机
绳索驱动智能平仓并联机器人.pdf
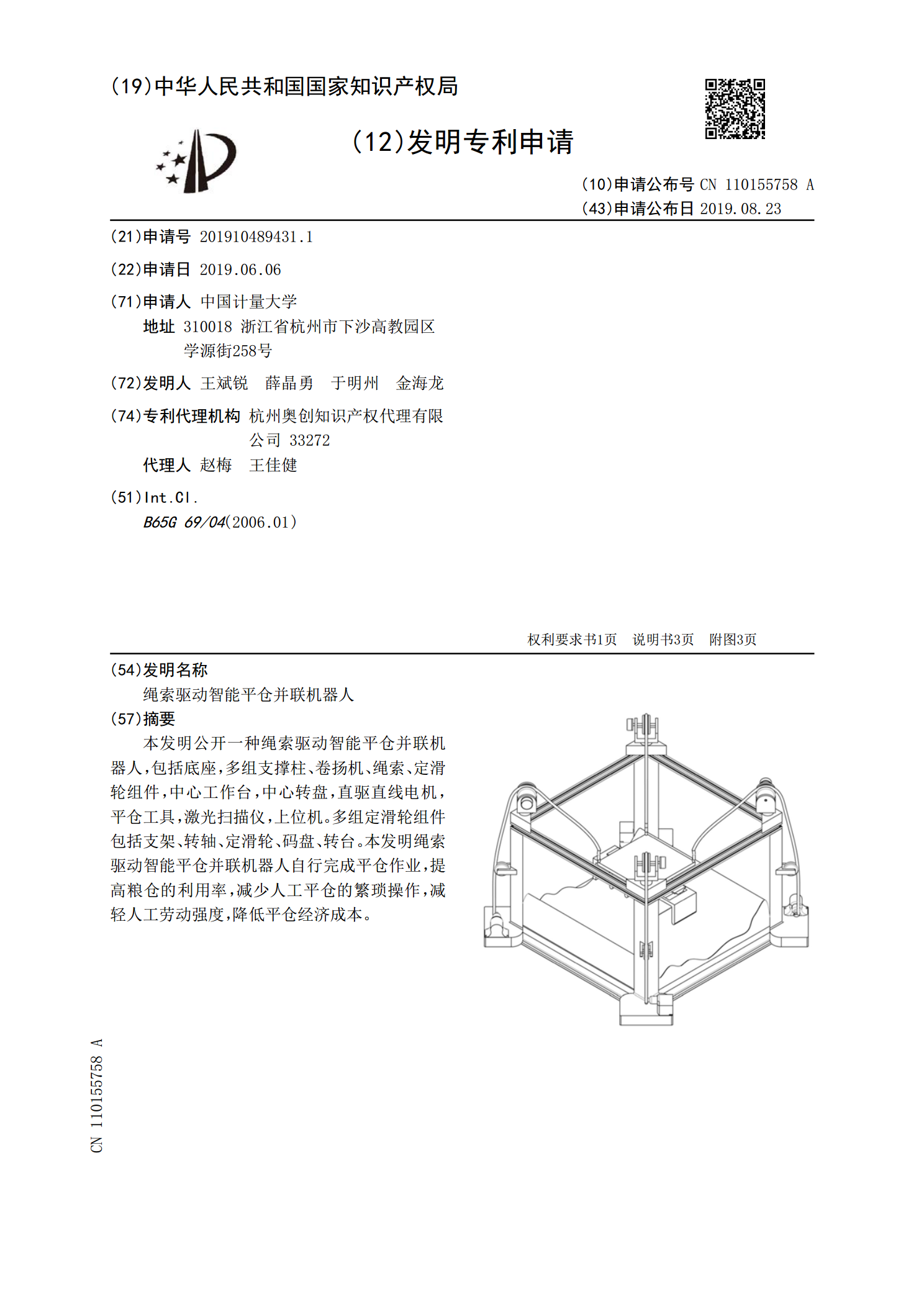
本发明公开一种绳索驱动智能平仓并联机器人,包括底座,多组支撑柱、卷扬机、绳索、定滑轮组件,中心工作台,中心转盘,直驱直线电机,平仓工具,激光扫描仪,上位机。多组定滑轮组件包括支架、转轴、定滑轮、码盘、转台。本发明绳索驱动智能平仓并联机器人自行完成平仓作业,提高粮仓的利用率,减少人工平仓的繁琐操作,减轻人工劳动强度,降低平仓经济成本。

电动汽车驱动系统设计及动态特性分析的开题报告.docx
电动汽车驱动系统设计及动态特性分析的开题报告一、选题背景随着能源与环境问题的日益严重,电动汽车成为了解决传统汽车问题的有效途径。而作为电动汽车的核心部分之一,电动汽车驱动系统的设计与动态特性分析,对于电动汽车的性能和安全具有重要的影响。因此,对电动汽车驱动系统设计及动态特性分析进行研究具有重要的现实意义和应用价值。二、研究内容本研究将通过以下几方面的探索,深入研究电动汽车驱动系统设计及动态特性分析:1.电动汽车驱动系统的设计原理和组成结构,其中包括电动机、电池组、控制器、减速器等核心部件的功能和性能指标;

绳索牵引并联机器人的视觉伺服控制研究的开题报告.docx
绳索牵引并联机器人的视觉伺服控制研究的开题报告题目:基于视觉伺服控制的绳索牵引并联机器人研究一、研究背景和意义随着机器人技术的不断发展,机器人在工业生产、医疗卫生、教育等领域中日益广泛应用。并联机器人具有高刚度、高精度、高速度等优点,在工业制造领域中得到了广泛的应用。而绳索牵引并联机器人是一种新型的并联机器人,具有结构简单、负载分布均匀、能够利用外部力平衡作用等优点,因此在多项工业制造领域得到广泛应用。在绳索牵引并联机器人中,如何实现精确控制成为了研究的热点问题。传统的控制方法如PID控制方法等只能解决一