
基于驾驶特征学习的自动驾驶车辆换道轨迹规划.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于驾驶特征学习的自动驾驶车辆换道轨迹规划.pptx
添加副标题目录PART01PART02换道轨迹规划的定义换道轨迹规划的重要性换道轨迹规划的难点PART03驾驶特征的提取与分类基于驾驶特征的换道轨迹规划算法驾驶特征与换道轨迹的关联性分析PART04实验场景与数据集实验方法与评价指标实验结果与分析PART05优势分析局限性分析未来研究方向PART06实际应用场景与案例分析技术发展对换道轨迹规划的影响未来技术发展趋势与展望感谢您的观看

基于驾驶特征学习的自动驾驶车辆换道轨迹规划.docx
基于驾驶特征学习的自动驾驶车辆换道轨迹规划基于驾驶特征学习的自动驾驶车辆换道轨迹规划摘要:随着智能驾驶技术的不断发展,自动驾驶车辆的换道行为逐渐受到关注。为了实现安全、高效、准确的换道轨迹规划,我们提出了基于驾驶特征学习的方法。该方法通过深度学习技术从大量的驾驶数据中提取关键特征,然后使用这些特征来学习换道规划模型。实验结果表明,我们的方法在换道行为预测和规划精度方面具有较好的性能,能够有效提高自动驾驶车辆的换道能力。关键词:自动驾驶;换道行为;轨迹规划;深度学习;驾驶特征学习1.引言自动驾驶技术的发展使

基于熟练驾驶换道特征的车辆换道轨迹规划研究.docx
基于熟练驾驶换道特征的车辆换道轨迹规划研究基于熟练驾驶换道特征的车辆换道轨迹规划研究摘要:随着交通流量的增加,车辆换道操作在道路交通中显得非常重要。车辆换道过程中,驾驶员的熟练驾驶换道能力直接影响到交通安全和交通效率。因此,本文基于熟练驾驶换道特征,对车辆换道轨迹规划进行了研究。首先,分析了熟练驾驶换道的特点和影响因素。然后,提出了车辆换道轨迹规划的方法,并通过仿真实验进行了验证。实验结果表明,本文提出的方法可以有效地规划熟练驾驶换道轨迹,提高交通流的运行效率。关键词:驾驶行为、换道特征、轨迹规划、交通流
基于轨迹规划的自动驾驶车辆避障控制方法及系统.pdf
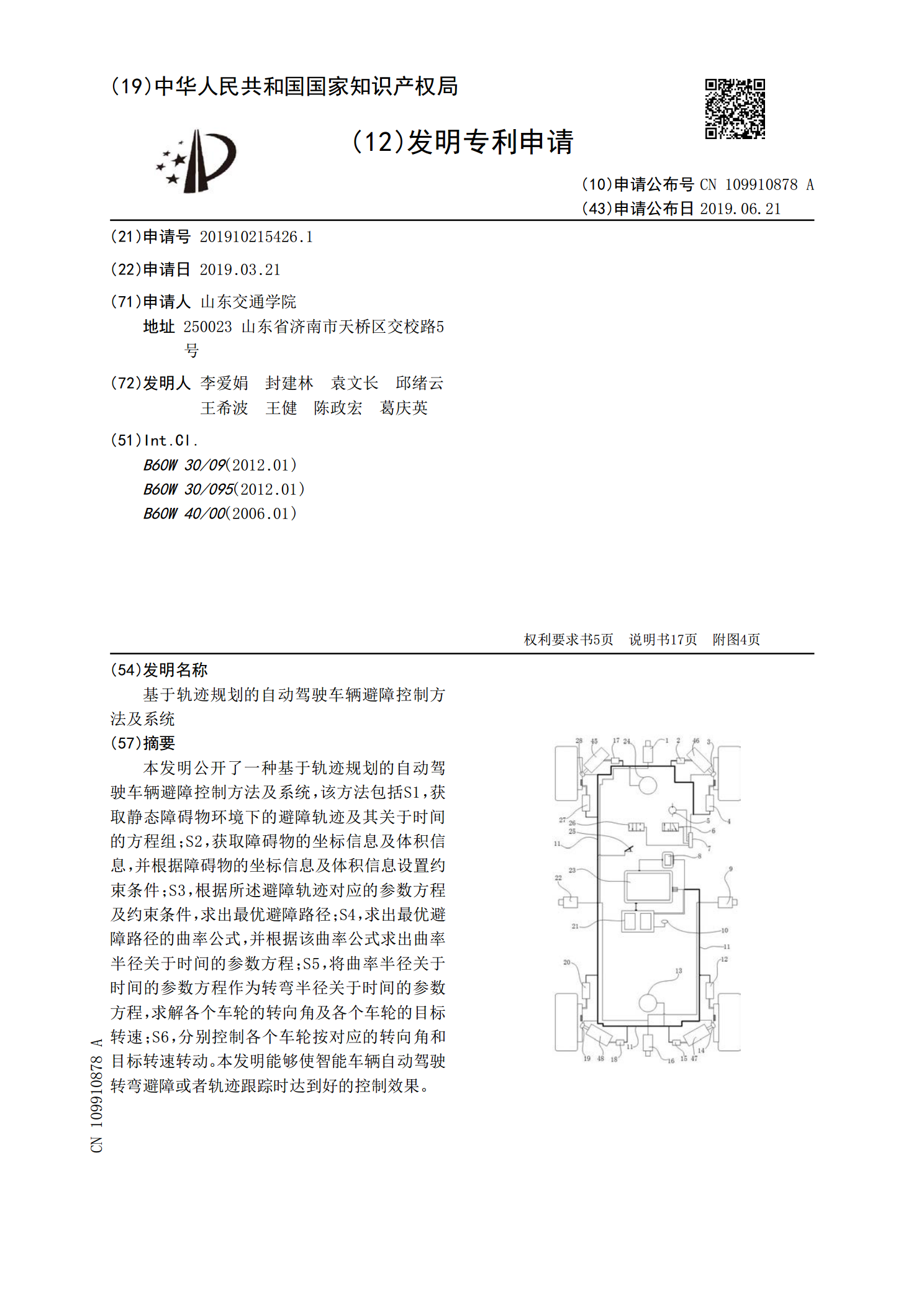
本发明公开了一种基于轨迹规划的自动驾驶车辆避障控制方法及系统,该方法包括S1,获取静态障碍物环境下的避障轨迹及其关于时间的方程组;S2,获取障碍物的坐标信息及体积信息,并根据障碍物的坐标信息及体积信息设置约束条件;S3,根据所述避障轨迹对应的参数方程及约束条件,求出最优避障路径;S4,求出最优避障路径的曲率公式,并根据该曲率公式求出曲率半径关于时间的参数方程;S5,将曲率半径关于时间的参数方程作为转弯半径关于时间的参数方程,求解各个车轮的转向角及各个车轮的目标转速;S6,分别控制各个车轮按对应的转向角和目

自动驾驶车辆的避障轨迹规划.pdf
公开了一种用于操作ADV的计算机实施的方法。规划ADV沿其驾驶的第一轨迹(S1401)。ADV将沿第一轨迹自动驾驶(S1402)。基于从安装在ADV上的多个传感器获得的传感器数据来检测ADV的受影响区域中的障碍物(S1403)。确定障碍物在受影响区域中的预期驻留时间(S1404)。基于障碍物在受影响区域中的预期驻留时间来确定是规划第二轨迹还是等待障碍物离开受影响区域(S1405)。规划ADV沿其驾驶的第二轨迹,并且ADV将沿第二轨迹自动驾驶,或者ADV将等待障碍物离开受影响区域并随后沿第一轨迹自动驾驶(S