
基于最小模型误差估计的智能汽车路径跟踪控制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于最小模型误差估计的智能汽车路径跟踪控制.docx
基于最小模型误差估计的智能汽车路径跟踪控制基于最小模型误差估计的智能汽车路径跟踪控制摘要:智能汽车路径跟踪控制是实现自动驾驶的关键技术之一。在本文中,我们提出了一种基于最小模型误差估计的智能汽车路径跟踪控制算法。该算法利用模型预测和误差估计来优化车辆的控制策略,从而实现高精度的路径跟踪。通过对实验数据进行仿真分析和对比实验,我们证明了该算法的有效性和性能优势。关键词:智能汽车、路径跟踪、最小模型误差估计、模型预测、控制策略1.引言随着智能驾驶技术的不断发展,智能汽车路径跟踪控制成为了自动驾驶领域中重要的研

基于跟踪误差模型的智能车辆轨迹跟踪方法.docx
基于跟踪误差模型的智能车辆轨迹跟踪方法基于跟踪误差模型的智能车辆轨迹跟踪方法摘要:智能车辆的轨迹跟踪是实现自动驾驶的关键技术之一。为了实现精确的轨迹跟踪,本文提出了一种基于跟踪误差模型的智能车辆轨迹跟踪方法。首先,分析了轨迹跟踪的误差来源,建立了跟踪误差模型。然后,根据跟踪误差模型,设计了轨迹跟踪控制器,实现了智能车辆的精确跟踪。最后,通过仿真实验验证了该方法的有效性和可靠性。关键词:智能车辆,轨迹跟踪,跟踪误差模型,控制器设计,仿真实验1.引言随着科技的不断发展,智能车辆逐渐成为了现实世界中的一部分。智
基于灰狼算法的智能汽车路径跟踪控制系统及方法.pdf
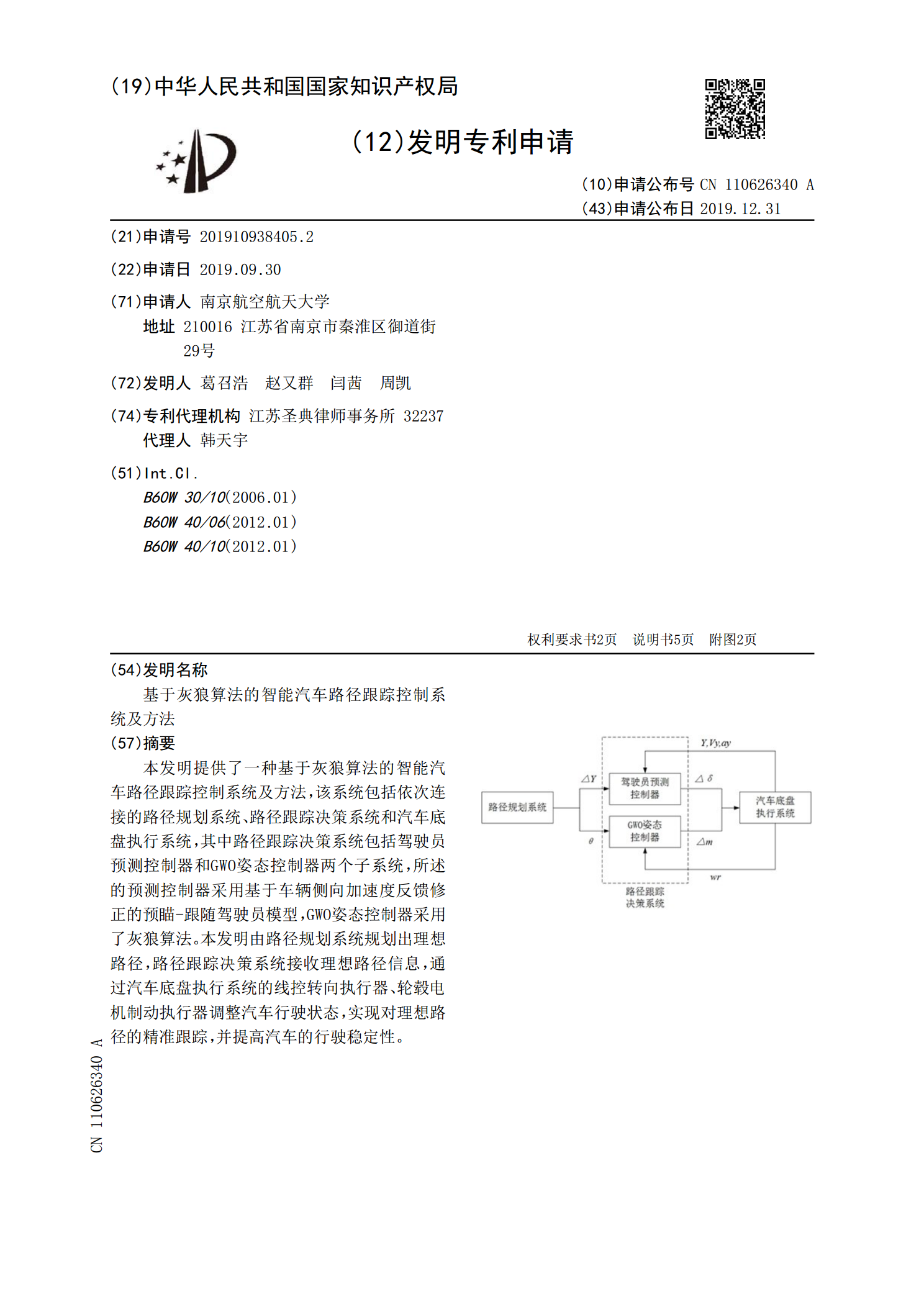
本发明提供了一种基于灰狼算法的智能汽车路径跟踪控制系统及方法,该系统包括依次连接的路径规划系统、路径跟踪决策系统和汽车底盘执行系统,其中路径跟踪决策系统包括驾驶员预测控制器和GWO姿态控制器两个子系统,所述的预测控制器采用基于车辆侧向加速度反馈修正的预瞄‑跟随驾驶员模型,GWO姿态控制器采用了灰狼算法。本发明由路径规划系统规划出理想路径,路径跟踪决策系统接收理想路径信息,通过汽车底盘执行系统的线控转向执行器、轮毂电机制动执行器调整汽车行驶状态,实现对理想路径的精准跟踪,并提高汽车的行驶稳定性。

基于非线性模型预测控制的智能车路径跟踪算法.docx
基于非线性模型预测控制的智能车路径跟踪算法智能车路径跟踪是自动驾驶技术中的重要问题之一,涉及多个领域的知识与技术,包括控制论、机器学习、计算机视觉等。在现有的研究中,基于非线性模型预测控制的智能车路径跟踪算法被广泛研究和应用,其不仅具备强大的预测能力,而且可以通过对模型的优化来达到更高的控制精度和鲁棒性,本文将对该算法进行系统介绍和分析。一、非线性模型预测控制的基本原理非线性模型预测控制是一种基于动态模型的控制方法,其基本原理是通过对系统模型进行建模,利用模型预测控制器对系统未来的行为进行预测,进而确定控

基于模型预测控制的智能汽车轨迹跟踪方法比较.docx
基于模型预测控制的智能汽车轨迹跟踪方法比较基于模型预测控制的智能汽车轨迹跟踪方法比较摘要:随着智能汽车技术的发展,轨迹跟踪是智能汽车设计中的核心问题之一。本论文将介绍基于模型预测控制(MPC)的智能汽车轨迹跟踪方法,并与其他常见的轨迹跟踪方法进行比较。通过对不同方法的优点和局限性的分析,本文最终得出结论,模型预测控制是一种有效的智能汽车轨迹跟踪方法。1.引言智能汽车轨迹跟踪是指智能汽车根据给定的轨迹,通过调整车辆的控制参数来实现车辆在指定路径上的运动。轨迹跟踪方法的选择对于智能汽车的性能至关重要。传统的控