
基于灰狼算法的智能汽车路径跟踪控制系统及方法.pdf

努力****爱静


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于灰狼算法的智能汽车路径跟踪控制系统及方法.pdf
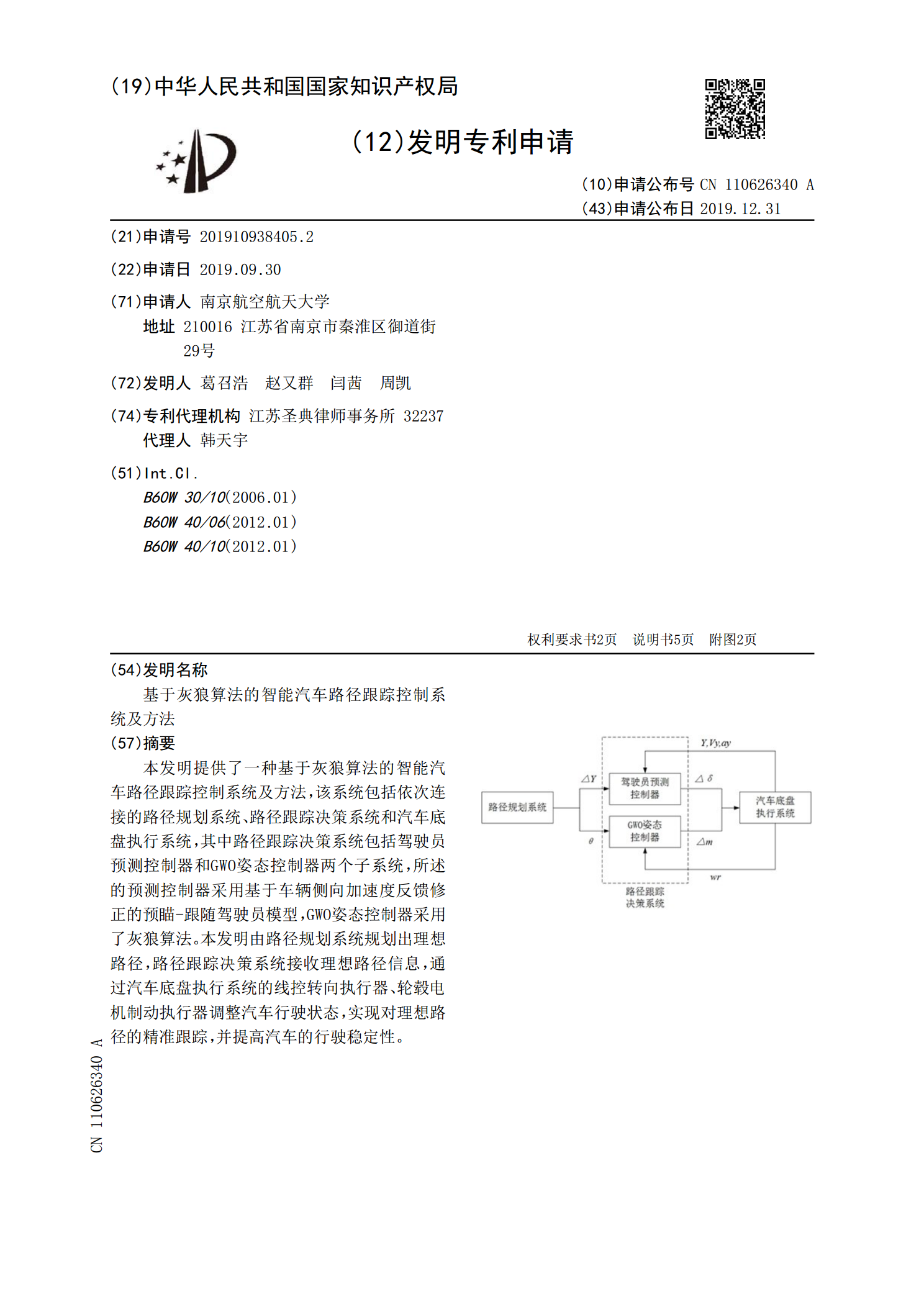
本发明提供了一种基于灰狼算法的智能汽车路径跟踪控制系统及方法,该系统包括依次连接的路径规划系统、路径跟踪决策系统和汽车底盘执行系统,其中路径跟踪决策系统包括驾驶员预测控制器和GWO姿态控制器两个子系统,所述的预测控制器采用基于车辆侧向加速度反馈修正的预瞄‑跟随驾驶员模型,GWO姿态控制器采用了灰狼算法。本发明由路径规划系统规划出理想路径,路径跟踪决策系统接收理想路径信息,通过汽车底盘执行系统的线控转向执行器、轮毂电机制动执行器调整汽车行驶状态,实现对理想路径的精准跟踪,并提高汽车的行驶稳定性。

智能车控制系统的设计与路径跟踪算法的研究.docx
智能车控制系统的设计与路径跟踪算法的研究智能车控制系统的设计与路径跟踪算法的研究摘要:随着科技的不断发展,智能车技术逐渐成为了现实中的一种重要应用。智能车的控制系统与路径跟踪算法是智能车技术中的关键要素,对智能车的性能和安全性起着重要的影响。本论文研究智能车控制系统的设计与路径跟踪算法,旨在提出一种高效、准确、安全的智能车控制方案。1.引言智能车作为一种集传感器、计算机、通信和控制技术于一体的智能化交通工具,已经得到了广泛的应用和发展。智能车控制系统是智能车的核心,它负责对车辆进行控制和决策,保证车辆的安

基于曲率前馈的智能车辆路径跟踪算法.docx
基于曲率前馈的智能车辆路径跟踪算法基于曲率前馈的智能车辆路径跟踪算法摘要:智能车辆路径跟踪是自动驾驶技术中的重要研究方向之一。本文基于曲率前馈的智能车辆路径跟踪算法进行了研究和设计。首先分析了智能车辆路径跟踪的背景和意义,然后介绍了曲率前馈控制的基本原理和算法流程,接着对该算法的实施步骤和关键技术进行了详细阐述。最后通过实验验证了该算法的性能和有效性。关键词:智能车辆;路径跟踪;曲率前馈;控制算法引言智能车辆的发展已经成为了当前汽车行业和自动驾驶技术的研发重点。路径跟踪作为智能车辆控制的核心技术之一,对实

基于Pure Pursuit算法的智能缩微车路径跟踪.pptx
基于PurePursuit算法的智能缩微车路径跟踪目录添加章节标题PurePursuit算法介绍算法基本原理算法特点算法应用场景算法优缺点智能缩微车的路径跟踪系统系统组成系统工作原理系统实现方式系统优缺点PurePursuit算法在智能缩微车路径跟踪中的应用算法在路径跟踪中的重要性算法在路径跟踪中的实现方式算法在路径跟踪中的优化策略算法在路径跟踪中的效果评估智能缩微车路径跟踪的未来发展技术发展趋势应用领域拓展未来发展方向技术挑战与机遇THANKYOU

基于最小模型误差估计的智能汽车路径跟踪控制.docx
基于最小模型误差估计的智能汽车路径跟踪控制基于最小模型误差估计的智能汽车路径跟踪控制摘要:智能汽车路径跟踪控制是实现自动驾驶的关键技术之一。在本文中,我们提出了一种基于最小模型误差估计的智能汽车路径跟踪控制算法。该算法利用模型预测和误差估计来优化车辆的控制策略,从而实现高精度的路径跟踪。通过对实验数据进行仿真分析和对比实验,我们证明了该算法的有效性和性能优势。关键词:智能汽车、路径跟踪、最小模型误差估计、模型预测、控制策略1.引言随着智能驾驶技术的不断发展,智能汽车路径跟踪控制成为了自动驾驶领域中重要的研