
基于非线性模型预测控制的智能车路径跟踪算法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于非线性模型预测控制的智能车路径跟踪算法.docx
基于非线性模型预测控制的智能车路径跟踪算法智能车路径跟踪是自动驾驶技术中的重要问题之一,涉及多个领域的知识与技术,包括控制论、机器学习、计算机视觉等。在现有的研究中,基于非线性模型预测控制的智能车路径跟踪算法被广泛研究和应用,其不仅具备强大的预测能力,而且可以通过对模型的优化来达到更高的控制精度和鲁棒性,本文将对该算法进行系统介绍和分析。一、非线性模型预测控制的基本原理非线性模型预测控制是一种基于动态模型的控制方法,其基本原理是通过对系统模型进行建模,利用模型预测控制器对系统未来的行为进行预测,进而确定控

基于非线性模型预测控制的自动泊车路径跟踪.docx
基于非线性模型预测控制的自动泊车路径跟踪引言自动泊车(AutomatedParking,AP)技术已经被广泛应用在汽车制造业中,不仅使得驾驶变得更加轻松和便捷,而且还减少了人为失误所带来的交通危险和交通拥堵问题。AP技术是一项高度的综合技术,它需要汽车系统的多项技术如车辆控制、传感器、图像识别等技术的集成。其中,车辆控制技术是AP技术的重要组成部分之一,决定了整个AP技术的性能和效果。因此,本文重点研究基于非线性模型预测控制的自动泊车路径跟踪技术。相关工作现有的AP技术中,路径跟踪控制方法主要有四种:PI

基于Pure Pursuit算法的智能缩微车路径跟踪.pptx
基于PurePursuit算法的智能缩微车路径跟踪目录添加章节标题PurePursuit算法介绍算法基本原理算法特点算法应用场景算法优缺点智能缩微车的路径跟踪系统系统组成系统工作原理系统实现方式系统优缺点PurePursuit算法在智能缩微车路径跟踪中的应用算法在路径跟踪中的重要性算法在路径跟踪中的实现方式算法在路径跟踪中的优化策略算法在路径跟踪中的效果评估智能缩微车路径跟踪的未来发展技术发展趋势应用领域拓展未来发展方向技术挑战与机遇THANKYOU

智能车控制系统的设计与路径跟踪算法的研究.docx
智能车控制系统的设计与路径跟踪算法的研究智能车控制系统的设计与路径跟踪算法的研究摘要:随着科技的不断发展,智能车技术逐渐成为了现实中的一种重要应用。智能车的控制系统与路径跟踪算法是智能车技术中的关键要素,对智能车的性能和安全性起着重要的影响。本论文研究智能车控制系统的设计与路径跟踪算法,旨在提出一种高效、准确、安全的智能车控制方案。1.引言智能车作为一种集传感器、计算机、通信和控制技术于一体的智能化交通工具,已经得到了广泛的应用和发展。智能车控制系统是智能车的核心,它负责对车辆进行控制和决策,保证车辆的安
基于clothoid曲线的智能车路径跟踪控制方法.pdf
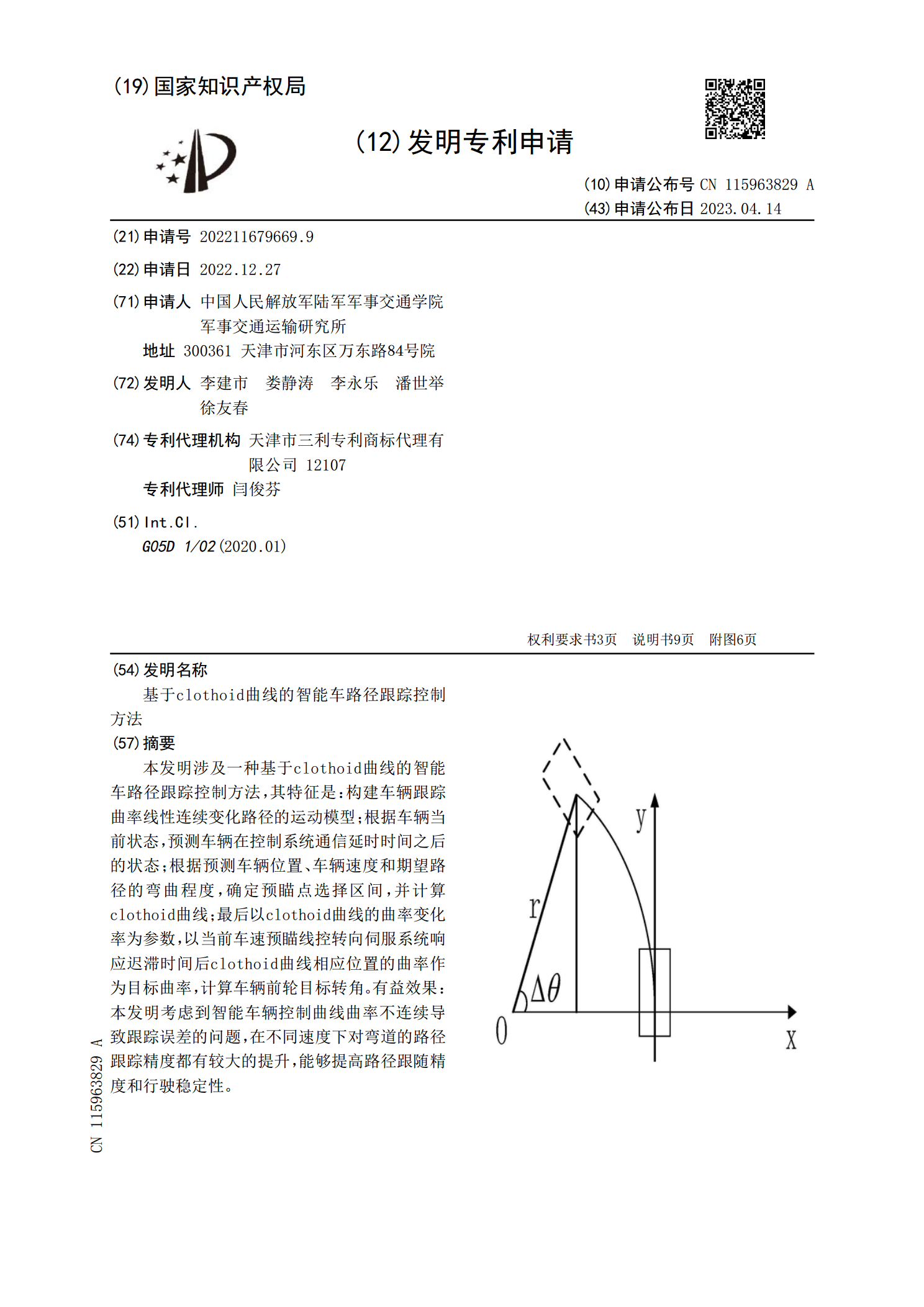
本发明涉及一种基于clothoid曲线的智能车路径跟踪控制方法,其特征是:构建车辆跟踪曲率线性连续变化路径的运动模型;根据车辆当前状态,预测车辆在控制系统通信延时时间之后的状态;根据预测车辆位置、车辆速度和期望路径的弯曲程度,确定预瞄点选择区间,并计算clothoid曲线;最后以clothoid曲线的曲率变化率为参数,以当前车速预瞄线控转向伺服系统响应迟滞时间后clothoid曲线相应位置的曲率作为目标曲率,计算车辆前轮目标转角。有益效果:本发明考虑到智能车辆控制曲线曲率不连续导致跟踪误差的问题,在不同速