
基于车载32线激光雷达点云的车辆目标识别算法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车载32线激光雷达点云的车辆目标识别算法.docx
基于车载32线激光雷达点云的车辆目标识别算法论文标题:基于车载32线激光雷达点云的车辆目标识别算法摘要:随着无人驾驶技术的快速发展,车载激光雷达作为感知系统的关键组成部分,正在成为研究的热点。车辆目标识别是无人驾驶中一项重要任务,本论文基于车载32线激光雷达点云,提出了一种新的车辆目标识别算法。该算法使用了点云坐标转换和特征提取方法,并结合深度学习网络进行目标检测和分类。实验结果表明,该算法具有较高的识别准确率和实时性,适用于车辆目标识别任务。关键词:车载激光雷达、点云处理、目标识别、深度学习、识别准确率

基于车载三维激光雷达的玉米点云数据滤波算法.docx
基于车载三维激光雷达的玉米点云数据滤波算法基于车载三维激光雷达的玉米点云数据滤波算法摘要:近年来,随着激光雷达和点云技术的快速发展,玉米点云数据的获取和处理成为农业领域的一个重要研究方向。然而,由于玉米植株较为复杂的形态特征和不确定的环境因素,玉米点云数据中通常包含大量的噪声和无效信息,对于提取有效的玉米植株信息造成了挑战。因此,本文基于车载三维激光雷达的玉米点云数据滤波算法,针对玉米点云数据中的噪声和无效信息进行了处理,实现了对玉米植株信息的准确提取。关键词:车载三维激光雷达;玉米点云数据;滤波算法;噪
一种基于车辆数据的车载激光雷达点云地面提取方法.pdf
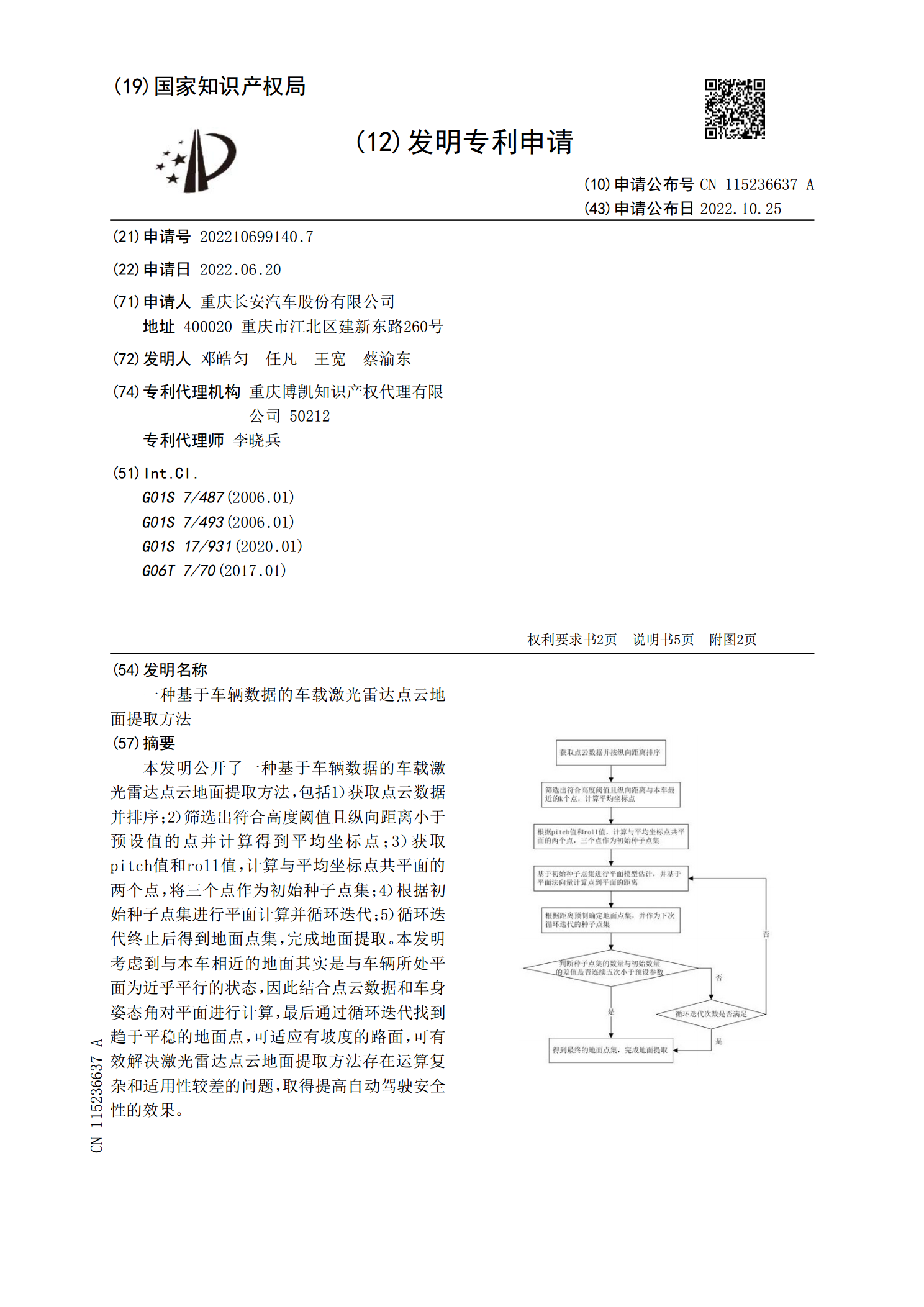
本发明公开了一种基于车辆数据的车载激光雷达点云地面提取方法,包括1)获取点云数据并排序;2)筛选出符合高度阈值且纵向距离小于预设值的点并计算得到平均坐标点;3)获取pitch值和roll值,计算与平均坐标点共平面的两个点,将三个点作为初始种子点集;4)根据初始种子点集进行平面计算并循环迭代;5)循环迭代终止后得到地面点集,完成地面提取。本发明考虑到与本车相近的地面其实是与车辆所处平面为近乎平行的状态,因此结合点云数据和车身姿态角对平面进行计算,最后通过循环迭代找到趋于平稳的地面点,可适应有坡度的路面,可有
一种基于激光雷达点云的车辆目标检测方法.pdf
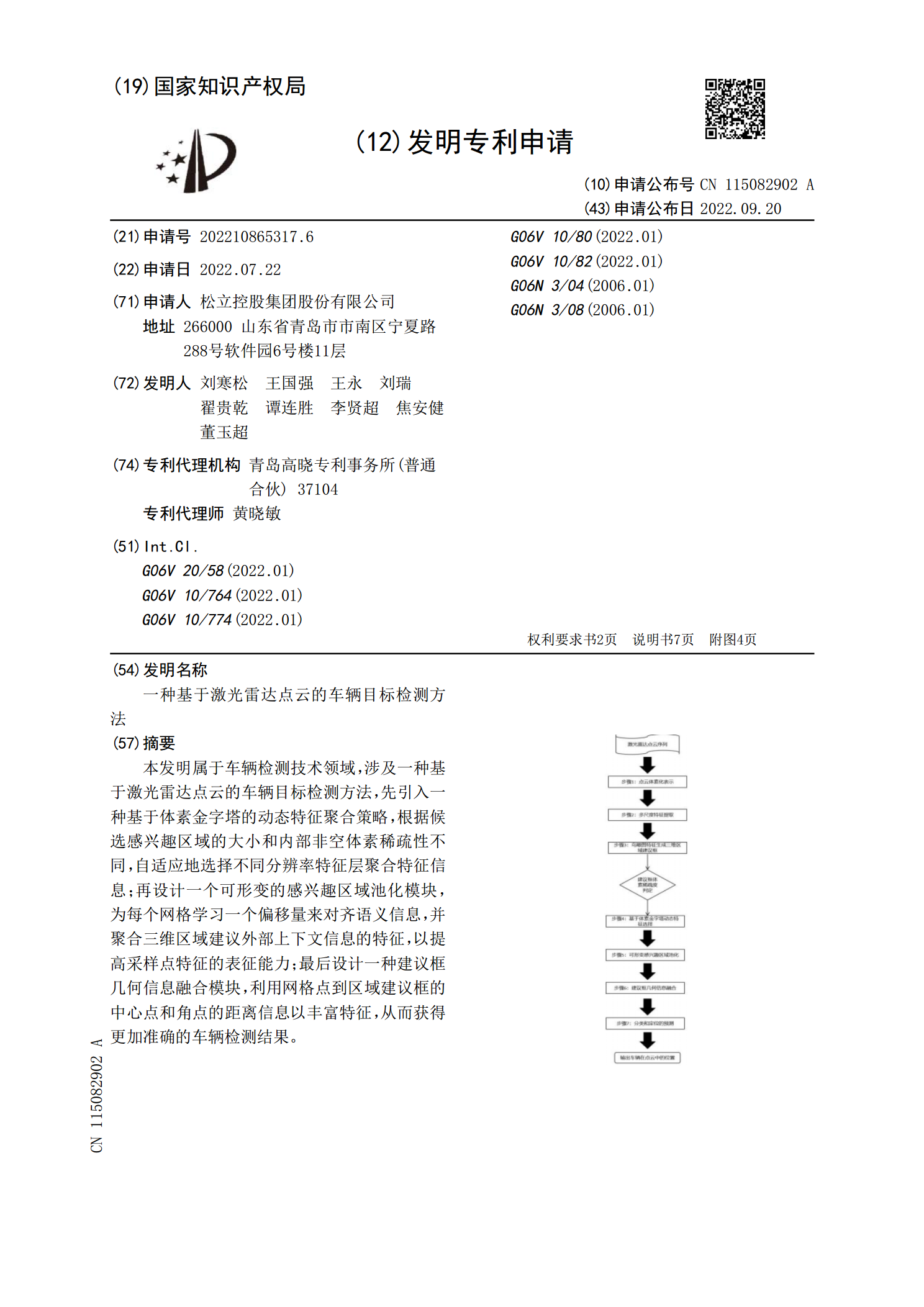
本发明属于车辆检测技术领域,涉及一种基于激光雷达点云的车辆目标检测方法,先引入一种基于体素金字塔的动态特征聚合策略,根据候选感兴趣区域的大小和内部非空体素稀疏性不同,自适应地选择不同分辨率特征层聚合特征信息;再设计一个可形变的感兴趣区域池化模块,为每个网格学习一个偏移量来对齐语义信息,并聚合三维区域建议外部上下文信息的特征,以提高采样点特征的表征能力;最后设计一种建议框几何信息融合模块,利用网格点到区域建议框的中心点和角点的距离信息以丰富特征,从而获得更加准确的车辆检测结果。
基于车载Lidar点云的行人识别方法.pdf
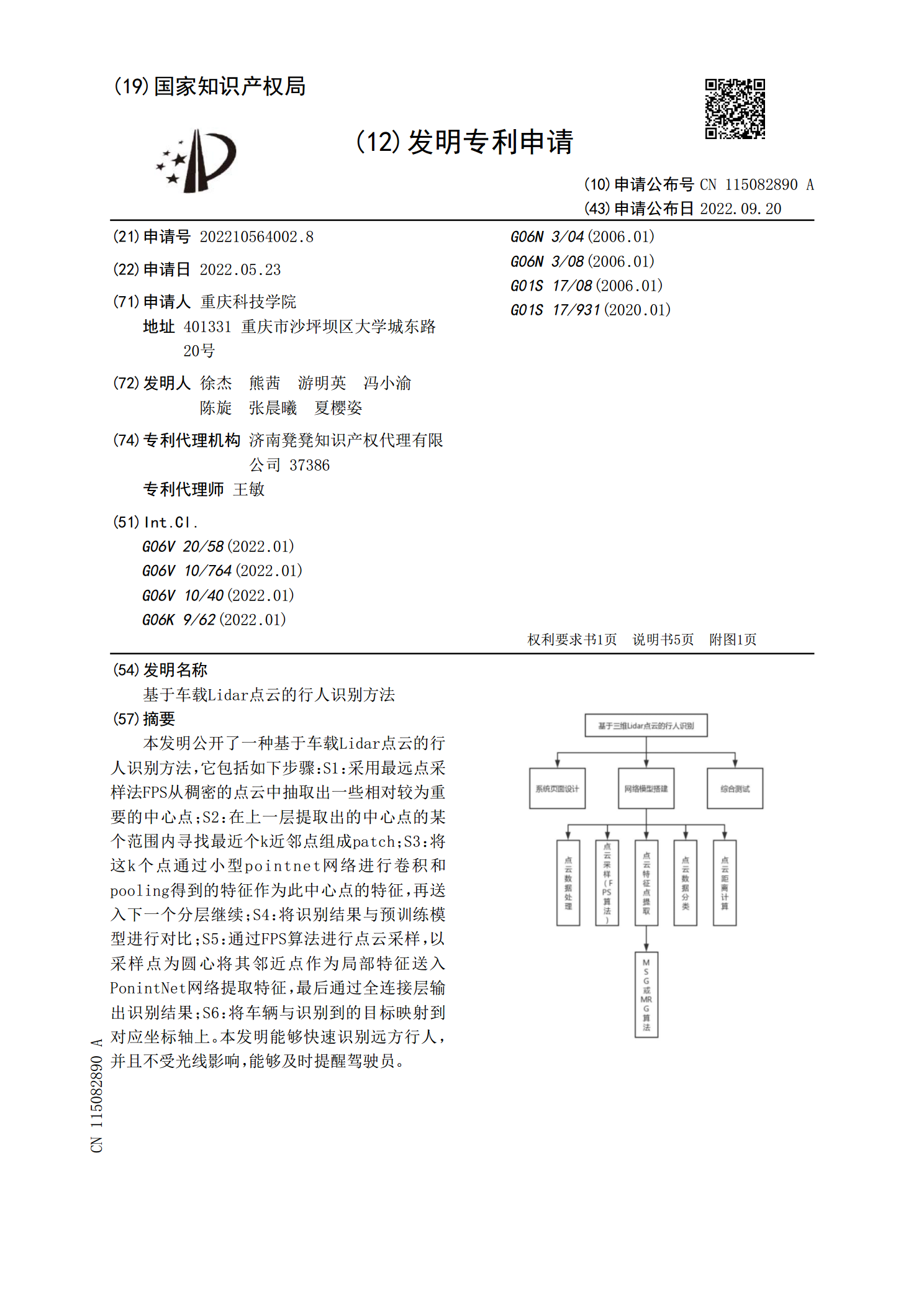
本发明公开了一种基于车载Lidar点云的行人识别方法,它包括如下步骤:S1:采用最远点采样法FPS从稠密的点云中抽取出一些相对较为重要的中心点;S2:在上一层提取出的中心点的某个范围内寻找最近个k近邻点组成patch;S3:将这k个点通过小型pointnet网络进行卷积和pooling得到的特征作为此中心点的特征,再送入下一个分层继续;S4:将识别结果与预训练模型进行对比;S5:通过FPS算法进行点云采样,以采样点为圆心将其邻近点作为局部特征送入PonintNet网络提取特征,最后通过全连接层输出识别结果