
一种基于激光雷达点云的车辆目标检测方法.pdf

猫巷****觅蓉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于激光雷达点云的车辆目标检测方法.pdf
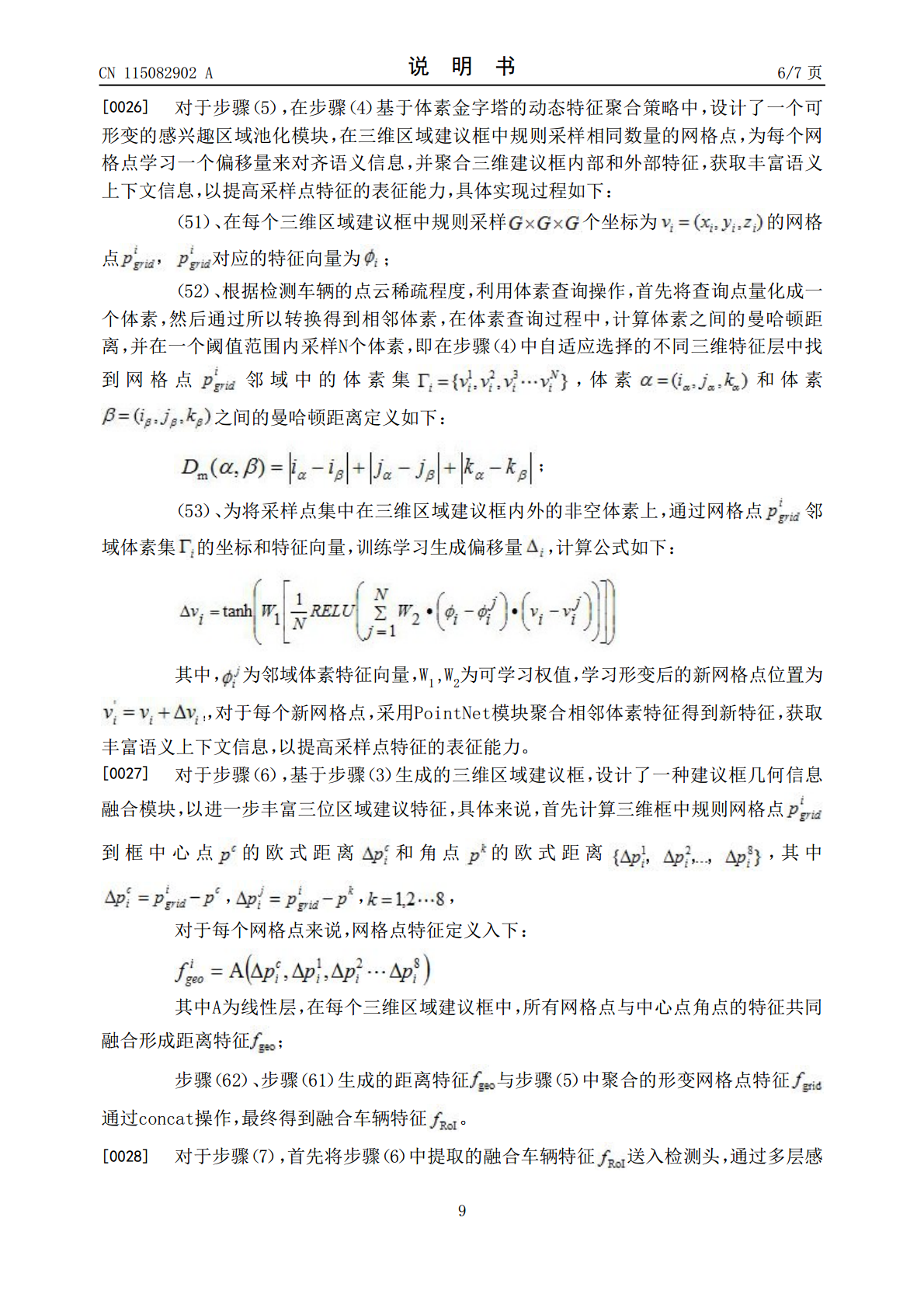
本发明属于车辆检测技术领域,涉及一种基于激光雷达点云的车辆目标检测方法,先引入一种基于体素金字塔的动态特征聚合策略,根据候选感兴趣区域的大小和内部非空体素稀疏性不同,自适应地选择不同分辨率特征层聚合特征信息;再设计一个可形变的感兴趣区域池化模块,为每个网格学习一个偏移量来对齐语义信息,并聚合三维区域建议外部上下文信息的特征,以提高采样点特征的表征能力;最后设计一种建议框几何信息融合模块,利用网格点到区域建议框的中心点和角点的距离信息以丰富特征,从而获得更加准确的车辆检测结果。
一种基于深度学习的激光雷达点云目标检测方法.pdf
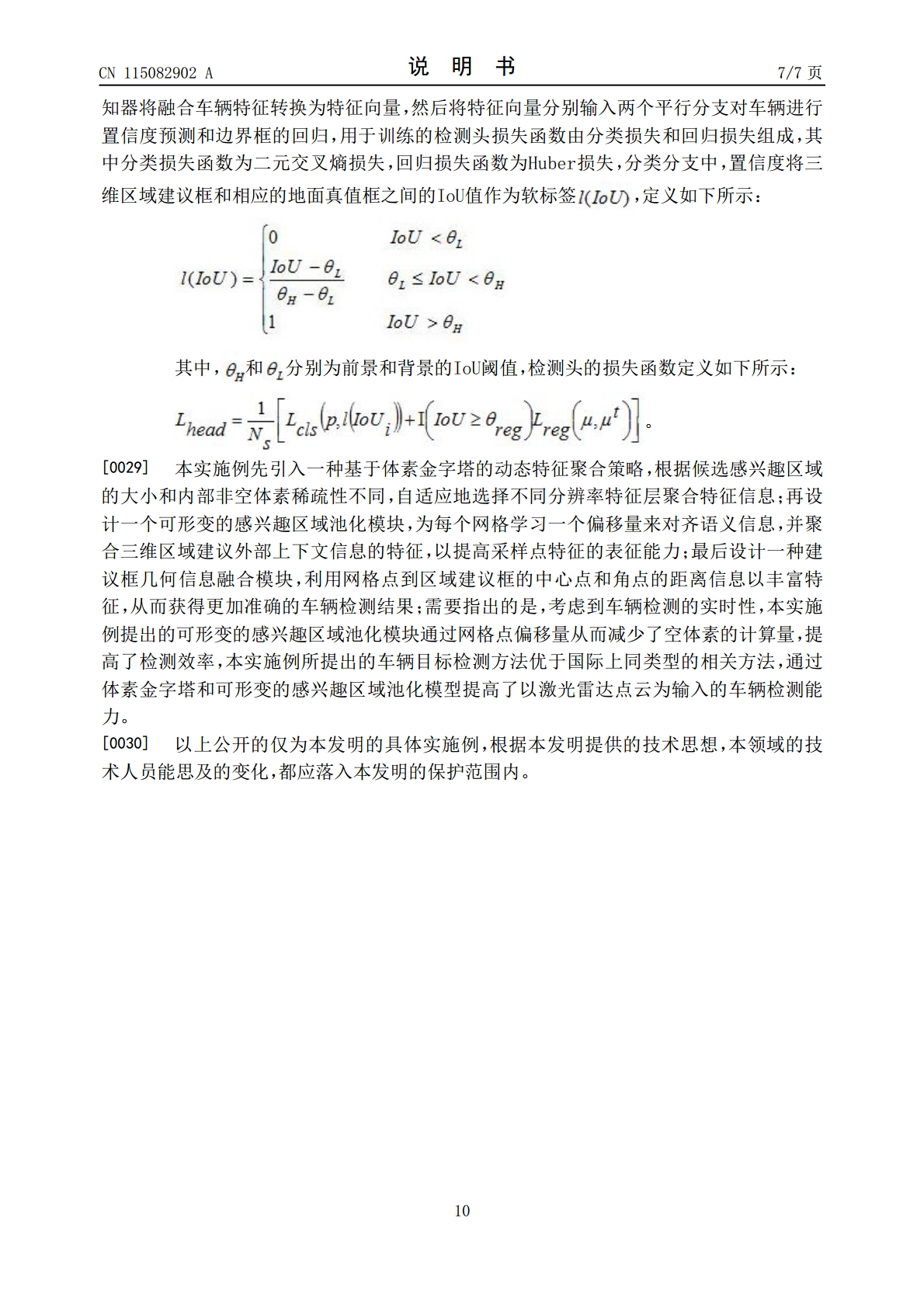
本发明涉及一种基于深度学习的激光雷达点云目标检测方法,包括如下步骤:收集激光雷达采集的雷达点云数据;将雷达点云划分为w*h*m个立方体,其中在xy平面上划分为w*h个网格;对任一网格采样N个点,得到采样点云;对采样点云的每个采样点的属性进行扩展得到张量矩阵;将所述张量矩阵送入神经元数量为C的全连接层后接relu层激活,将所述采样点云编码为(C,h,w)的伪图像;利用Backbone对伪图像进行目标检测。本发明由于对点云进行了有效的编码,计算量更小,检测速度快;Backbone输出的特征融合了高分辨率特征图
基于相机图像驱动的激光雷达点云目标检测方法及系统.pdf
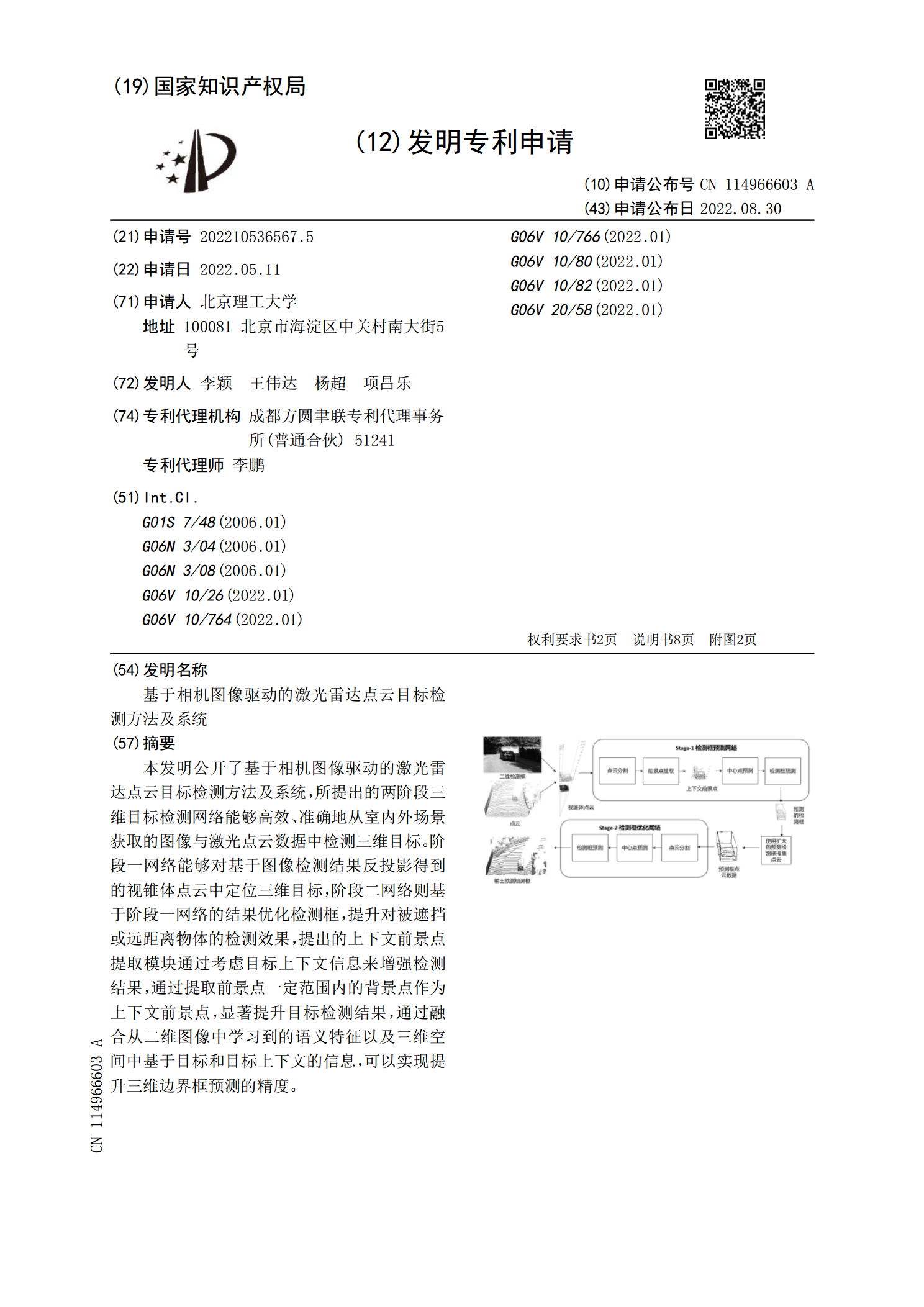
本发明公开了基于相机图像驱动的激光雷达点云目标检测方法及系统,所提出的两阶段三维目标检测网络能够高效、准确地从室内外场景获取的图像与激光点云数据中检测三维目标。阶段一网络能够对基于图像检测结果反投影得到的视锥体点云中定位三维目标,阶段二网络则基于阶段一网络的结果优化检测框,提升对被遮挡或远距离物体的检测效果,提出的上下文前景点提取模块通过考虑目标上下文信息来增强检测结果,通过提取前景点一定范围内的背景点作为上下文前景点,显著提升目标检测结果,通过融合从二维图像中学习到的语义特征以及三维空间中基于目标和目标

激光雷达点云目标检测方法、系统及装置.pdf
本发明公开了一种激光雷达点云目标检测方法,对点云信息构建前视图栅格,分别对前视图栅格提取特征以及对每一个前视图栅格内最近点提取点特征并结合,再通过三维目标检测器检测障碍物。本发明对高分辨率点云信息能够有好的保留,使得检测性能更好。
一种激光雷达点云积分目标检测方法、介质及系统.pdf
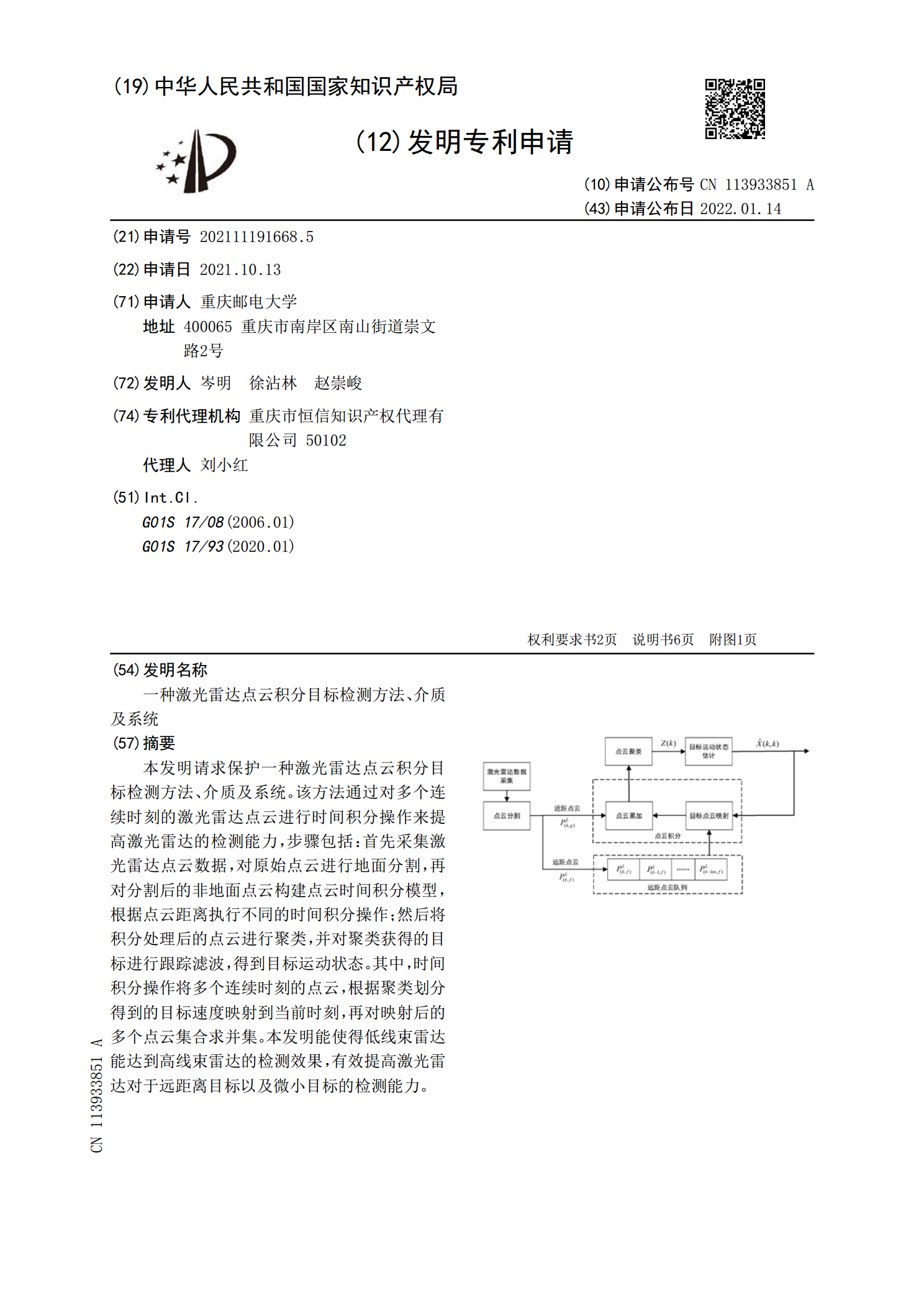
本发明请求保护一种激光雷达点云积分目标检测方法、介质及系统。该方法通过对多个连续时刻的激光雷达点云进行时间积分操作来提高激光雷达的检测能力,步骤包括:首先采集激光雷达点云数据,对原始点云进行地面分割,再对分割后的非地面点云构建点云时间积分模型,根据点云距离执行不同的时间积分操作;然后将积分处理后的点云进行聚类,并对聚类获得的目标进行跟踪滤波,得到目标运动状态。其中,时间积分操作将多个连续时刻的点云,根据聚类划分得到的目标速度映射到当前时刻,再对映射后的多个点云集合求并集。本发明能使得低线束雷达能达到高线束