
基于车载Lidar点云的行人识别方法.pdf

山柳****魔王

1/8

2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于车载Lidar点云的行人识别方法.pdf
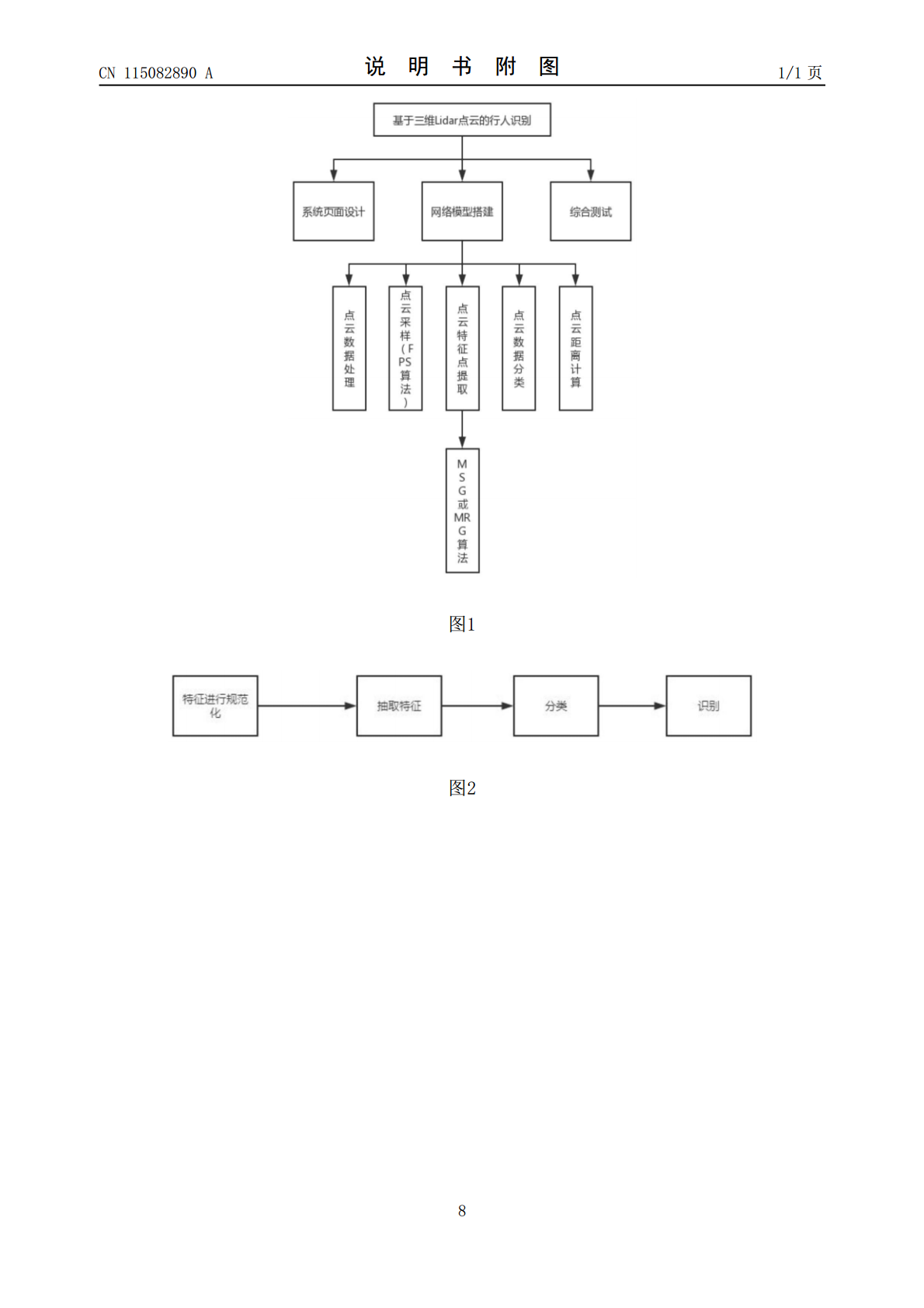
本发明公开了一种基于车载Lidar点云的行人识别方法,它包括如下步骤:S1:采用最远点采样法FPS从稠密的点云中抽取出一些相对较为重要的中心点;S2:在上一层提取出的中心点的某个范围内寻找最近个k近邻点组成patch;S3:将这k个点通过小型pointnet网络进行卷积和pooling得到的特征作为此中心点的特征,再送入下一个分层继续;S4:将识别结果与预训练模型进行对比;S5:通过FPS算法进行点云采样,以采样点为圆心将其邻近点作为局部特征送入PonintNet网络提取特征,最后通过全连接层输出识别结果

基于车载2D LiDAR点云数据的行道树靶标识别方法.pdf
本发明公开了一种基于车载2DLiDAR点云数据的行道树靶标识别方法,包括使用车载2DLiDAR系统获取街道数据,保存为点云文件,对点云文件进行树冠及非树冠类别标注;构建变尺度格网,从变尺度格网中提取三维球域;计算三维球域内的点云特征向量,得到点云特征向量集;SVM算法从点云特征向量集中学习树冠点云分类器;根据树冠点云分类器对点云帧进行在线识别,得到喷雾处方图。本发明采用数据冗余度小、易于在线处理的车载2DLiDAR获取城市街道数据,为对靶施药提供精确喷雾依据。建立保留数据精度、提高邻域检索效率、满足

基于Lidar点云的货车载货体积测量应用研究.docx
基于Lidar点云的货车载货体积测量应用研究摘要本文介绍了一种基于激光雷达(Lidar)点云的货车载货体积测量应用研究方法。该方法基于Lidar传感器对货物进行高精度的3D扫描,建立点云数据模型,并借助计算机处理技术进行数据分析和提取,从而实现对货物体积的精确量测。本文叙述了该方法的原理、实现步骤以及技术优势,并通过实验验证了该方法的测量准确性和实用性。研究表明,该方法可以满足实际应用的要求,具有广泛的应用前景。关键词:激光雷达;点云;货车;载货体积;测量引言货车运输是现代物流业中极为重要的一环,而对货物

基于车载LiDAR点云联合特征的道路边界提取研究.docx
基于车载LiDAR点云联合特征的道路边界提取研究基于车载LiDAR点云联合特征的道路边界提取研究摘要:在自动驾驶技术的研究和应用中,准确、稳定地提取道路边界是至关重要的。本文提出了一种基于车载LiDAR点云联合特征提取道路边界的方法。该方法利用车载LiDAR传感器获取的点云数据,并结合其他传感器获得的信号信息,借助卷积神经网络(CNN)和图像处理算法实现道路边界的准确提取。实验结果表明,该方法在道路边界提取方面取得了较好的效果。关键词:车载LiDAR,点云数据,道路边界,卷积神经网络,图像处理算法1.引言

基于流和八叉树的车载LiDAR点云数据处理.docx
基于流和八叉树的车载LiDAR点云数据处理基于流和八叉树的车载LiDAR点云数据处理摘要:随着自动驾驶技术的不断发展,车载激光雷达(LiDAR)成为无人驾驶系统中重要的感知模块。然而,车载LiDAR根据点云数据进行实时的目标检测和跟踪是一项挑战性的任务。本论文提出了一种基于流和八叉树的车载LiDAR点云数据处理方法,结合光流和八叉树分析,以提高目标检测和跟踪的准确性和效率。关键词:车载LiDAR,点云数据处理,光流,八叉树1.引言自动驾驶技术的发展使车辆能够在没有人工干预的情况下进行驾驶。为了实现安全和可