
一种基于回旋曲线的局部路径规划方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于回旋曲线的局部路径规划方法.docx
一种基于回旋曲线的局部路径规划方法基于回旋曲线的局部路径规划方法摘要:路径规划是自主移动机器人领域的一个重要研究问题。在复杂的环境中,机器人需要能够有效地规划出安全且最优的路径。本论文提出了一种基于回旋曲线的局部路径规划方法,该方法通过引入回旋曲线来生成机器人的局部路径,以避免障碍物,并尽可能减小路径的长度。实验结果表明,该方法能够在复杂环境中实现快速而安全的路径规划。1.引言随着自主移动机器人的发展,路径规划变得越来越重要。机器人要能够在各种不同的环境下安全导航,路径规划就成为一项关键任务。局部路径规划

基于Dubins曲线的局部路径规划方法研究.docx
基于Dubins曲线的局部路径规划方法研究一、前言随着无人驾驶技术的快速发展,越来越多的自动驾驶车辆开始投入实际使用。而无人驾驶车辆在行驶过程中,需要通过路径规划算法来选择行驶路径。本文将介绍一种基于Dubins曲线的局部路径规划方法,旨在提高无人驾驶车辆的行驶安全性和行驶效率。二、Dubins曲线介绍Dubins曲线(Dubinspath)是由美国数学家、工程师和飞行员LeonardDubins于1957年提出的一种连续性的、最短路径的曲线,可以用于解决航空、导航、机器人和无人驾驶等领域的问题。Dubi
一种基于改进EM算法的局部路径规划方法、介质及设备.pdf
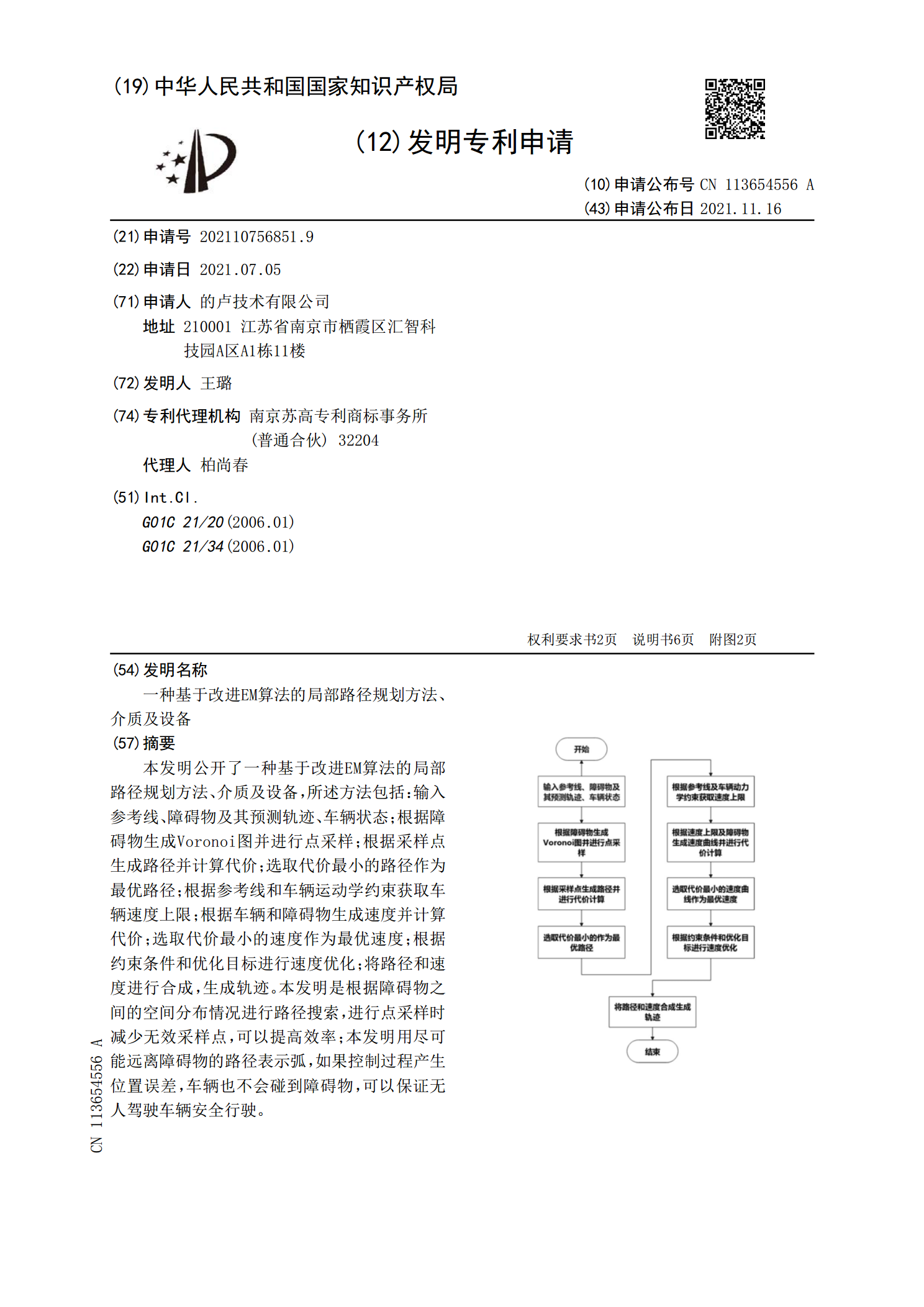
本发明公开了一种基于改进EM算法的局部路径规划方法、介质及设备,所述方法包括:输入参考线、障碍物及其预测轨迹、车辆状态;根据障碍物生成Voronoi图并进行点采样;根据采样点生成路径并计算代价;选取代价最小的路径作为最优路径;根据参考线和车辆运动学约束获取车辆速度上限;根据车辆和障碍物生成速度并计算代价;选取代价最小的速度作为最优速度;根据约束条件和优化目标进行速度优化;将路径和速度进行合成,生成轨迹。本发明是根据障碍物之间的空间分布情况进行路径搜索,进行点采样时减少无效采样点,可以提高效率;本发明用尽可

一种基于多算力融合的局部路径规划方法与系统.pdf
本发明公开了一种基于多算力融合的局部路径规划方法与系统,属于智能车辆的局部导航领域。根据智能车辆传感器提取的信息,建立包含障碍物信息的地图,构建人工势场,初始化路径规划任务,计算当前车辆所在位置在人工势力场中所收到的斥力,将车辆当前位置到目标点的距离作为调节因子,加入到斥力函数中,并进行分段调节。设计采样时间距离阈值,基于单位采样时间距离阈值判断是否陷入局部最优情况,若是,建立二维栅格地图。若否,继续返回设计的人工势场法进行局部路径规划,再利用改进的人工势场法对多个中间目标点逐一局部规划。

基于Dubins曲线的车辆转向路径规划方法.pdf
本发明涉及一种基于Dubins曲线的车辆转向路径规划方法,包括:S1、获取车辆即将转向时的起始点坐标和终止点坐标,获取转弯半径并计算理论前轮转角和理论方向盘转角;S2、基于Dubins曲线规划最短转弯路径,将最短转弯路径显示给驾驶员;S3、当驾驶员控制车辆按照最短转弯路径转向时,判断实际方向盘转角与理论方向盘转角是否存在偏差,如果存在偏差,发出指示提醒驾驶员调整方向,直到实际方向盘转角与理论方向盘转角保持一致。本发明方法避免了因为驾驶员的判断不够准确而多次制动、加速、倒车来调整车辆姿态,提高了车辆发动机的