
一种基于多算力融合的局部路径规划方法与系统.pdf

曾琪****是我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于多算力融合的局部路径规划方法与系统.pdf
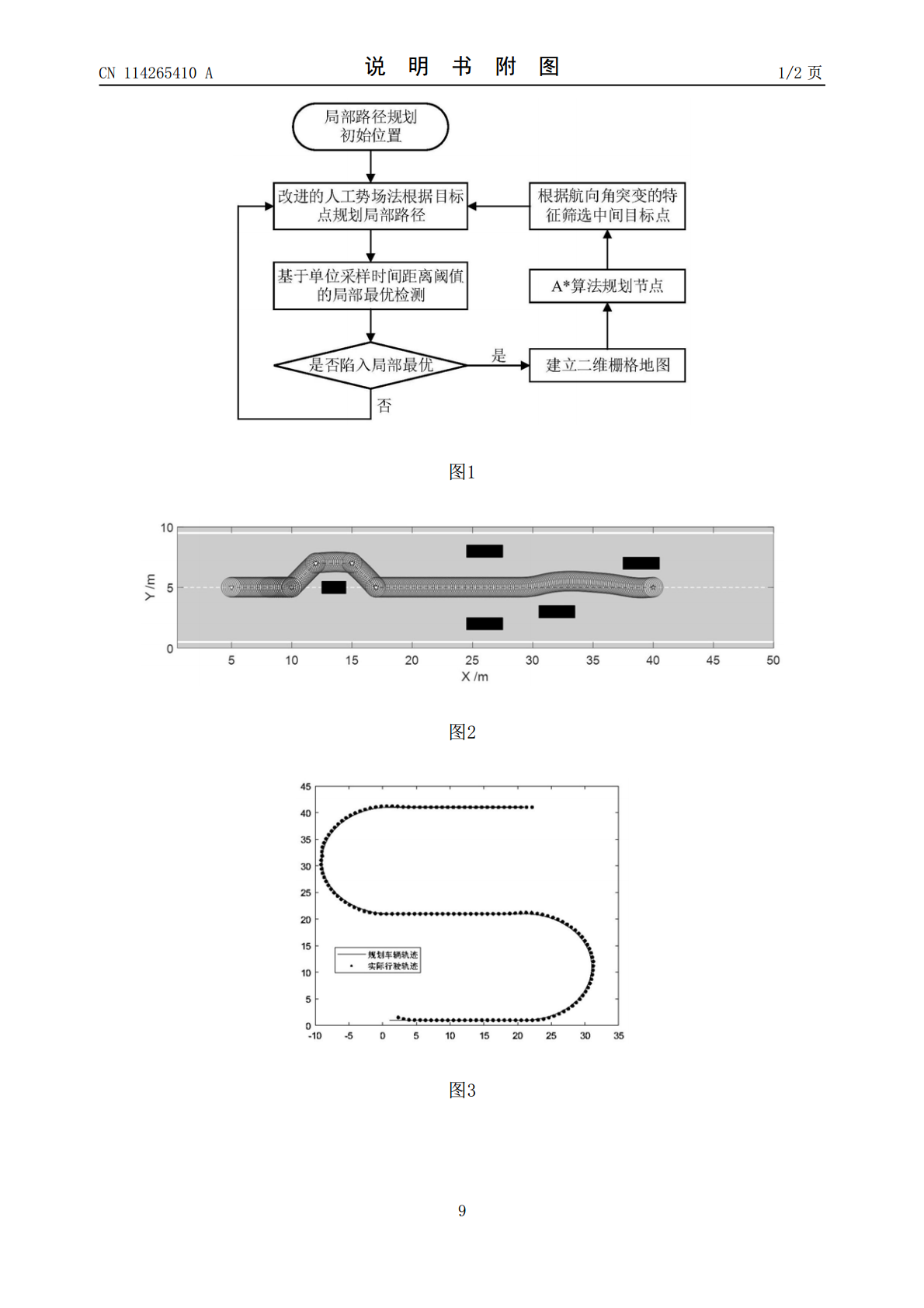
本发明公开了一种基于多算力融合的局部路径规划方法与系统,属于智能车辆的局部导航领域。根据智能车辆传感器提取的信息,建立包含障碍物信息的地图,构建人工势场,初始化路径规划任务,计算当前车辆所在位置在人工势力场中所收到的斥力,将车辆当前位置到目标点的距离作为调节因子,加入到斥力函数中,并进行分段调节。设计采样时间距离阈值,基于单位采样时间距离阈值判断是否陷入局部最优情况,若是,建立二维栅格地图。若否,继续返回设计的人工势场法进行局部路径规划,再利用改进的人工势场法对多个中间目标点逐一局部规划。
一种基于搜索的多智能体路径规划方法及系统.pdf
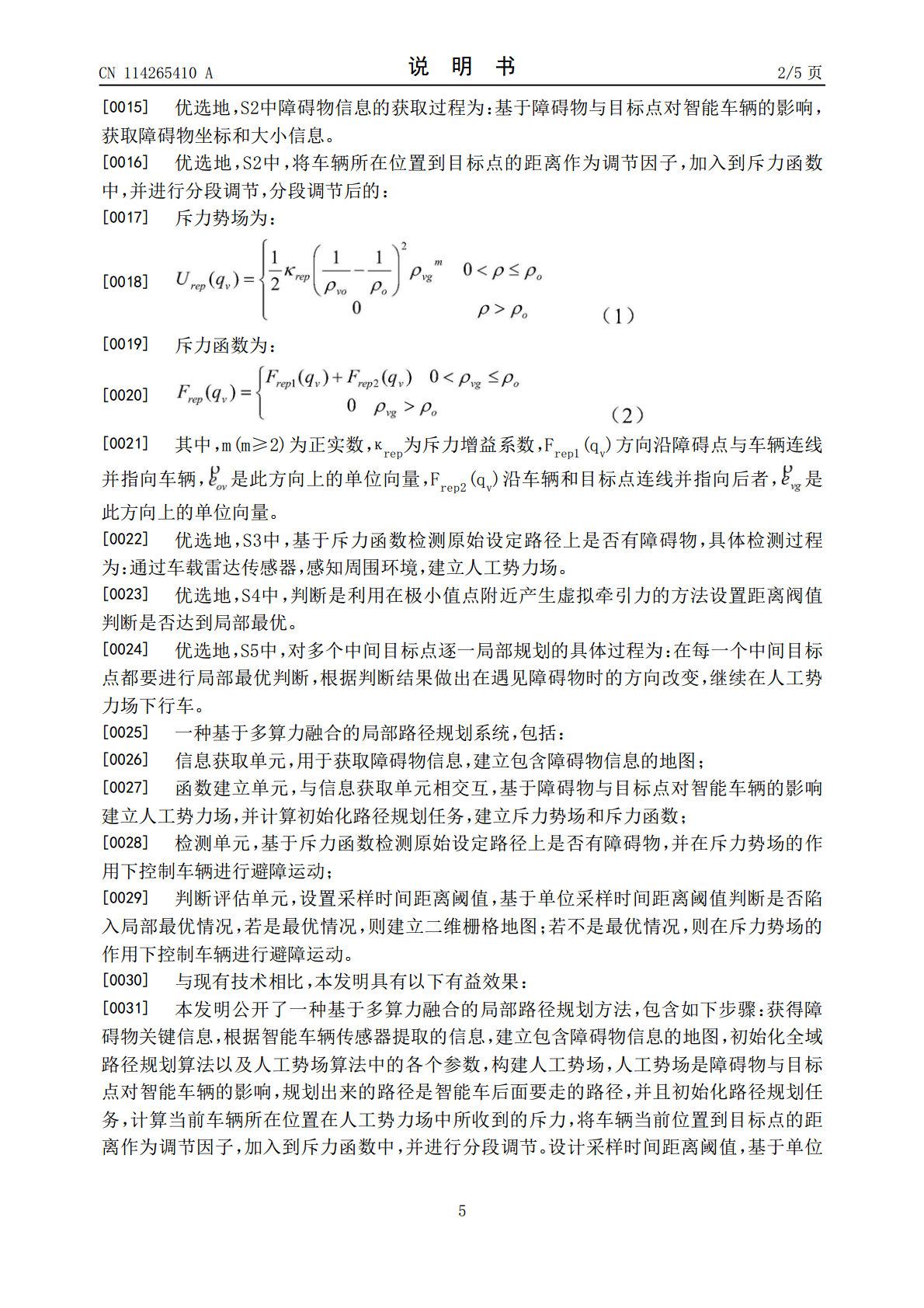
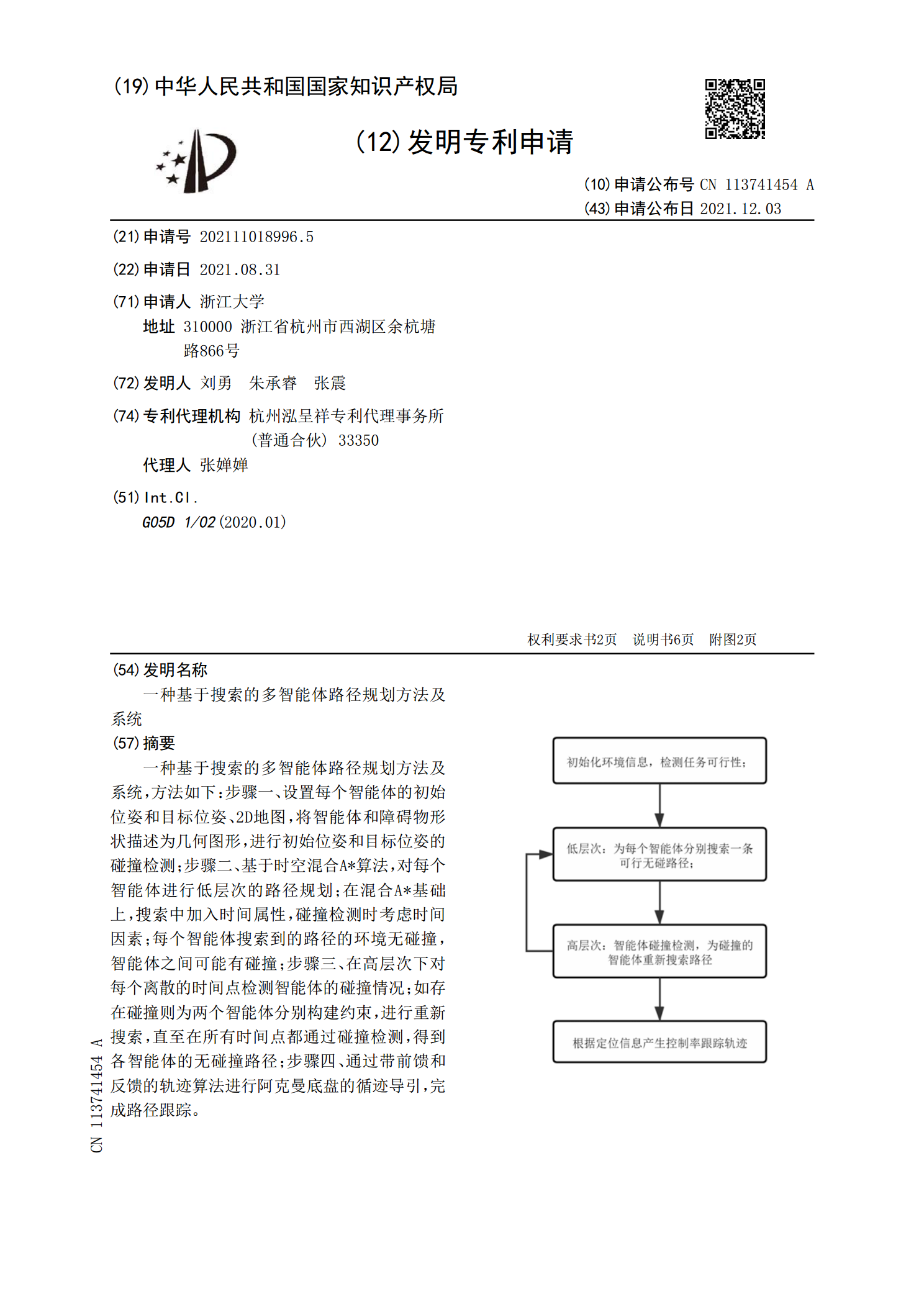
一种基于搜索的多智能体路径规划方法及系统,方法如下:步骤一、设置每个智能体的初始位姿和目标位姿、2D地图,将智能体和障碍物形状描述为几何图形,进行初始位姿和目标位姿的碰撞检测;步骤二、基于时空混合A*算法,对每个智能体进行低层次的路径规划;在混合A*基础上,搜索中加入时间属性,碰撞检测时考虑时间因素;每个智能体搜索到的路径的环境无碰撞,智能体之间可能有碰撞;步骤三、在高层次下对每个离散的时间点检测智能体的碰撞情况;如存在碰撞则为两个智能体分别构建约束,进行重新搜索,直至在所有时间点都通过碰撞检测,得到各智

一种基于回旋曲线的局部路径规划方法.docx
一种基于回旋曲线的局部路径规划方法基于回旋曲线的局部路径规划方法摘要:路径规划是自主移动机器人领域的一个重要研究问题。在复杂的环境中,机器人需要能够有效地规划出安全且最优的路径。本论文提出了一种基于回旋曲线的局部路径规划方法,该方法通过引入回旋曲线来生成机器人的局部路径,以避免障碍物,并尽可能减小路径的长度。实验结果表明,该方法能够在复杂环境中实现快速而安全的路径规划。1.引言随着自主移动机器人的发展,路径规划变得越来越重要。机器人要能够在各种不同的环境下安全导航,路径规划就成为一项关键任务。局部路径规划

基于Dubins曲线的局部路径规划方法研究.docx
基于Dubins曲线的局部路径规划方法研究一、前言随着无人驾驶技术的快速发展,越来越多的自动驾驶车辆开始投入实际使用。而无人驾驶车辆在行驶过程中,需要通过路径规划算法来选择行驶路径。本文将介绍一种基于Dubins曲线的局部路径规划方法,旨在提高无人驾驶车辆的行驶安全性和行驶效率。二、Dubins曲线介绍Dubins曲线(Dubinspath)是由美国数学家、工程师和飞行员LeonardDubins于1957年提出的一种连续性的、最短路径的曲线,可以用于解决航空、导航、机器人和无人驾驶等领域的问题。Dubi
2023113236327一种基于算力网络的算力服务能力模型构建方法和系统.pdf
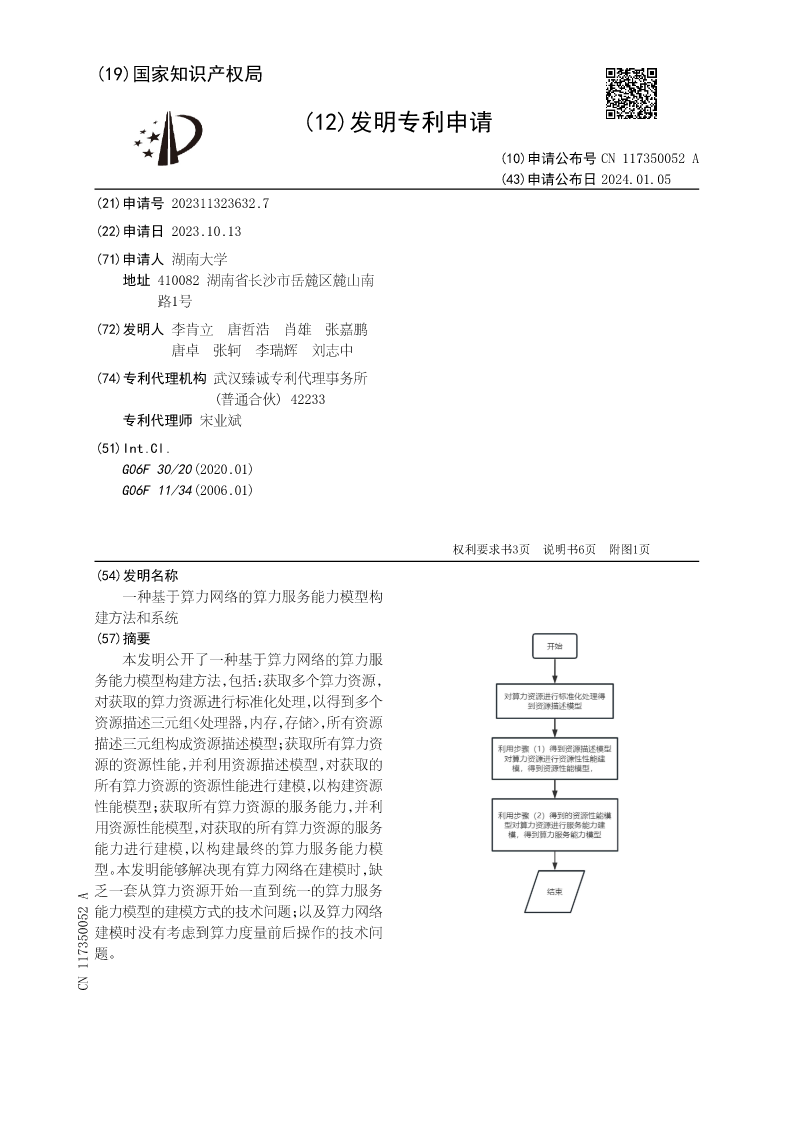
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN117350052A(43)申请公布日2024.01.05(21)申请号202311323632.7(22)申请日2023.10.13(71)申请人湖南大学地址410082湖南省长沙市岳麓区麓山南路1号(72)发明人李肯立唐哲浩肖雄张嘉鹏唐卓张轲李瑞辉刘志中(74)专利代理机构武汉臻诚专利代理事务所(普通合伙)42233专利代理师宋业斌(51)Int.Cl.G06F30/20(2020.01)G06F11/34(2006.01)权利要求书3页