
一种基于曲线查找算法的AGV弯道路径规划方法.pdf

景山****魔王


1/6
2/6
3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于曲线查找算法的AGV弯道路径规划方法.pdf
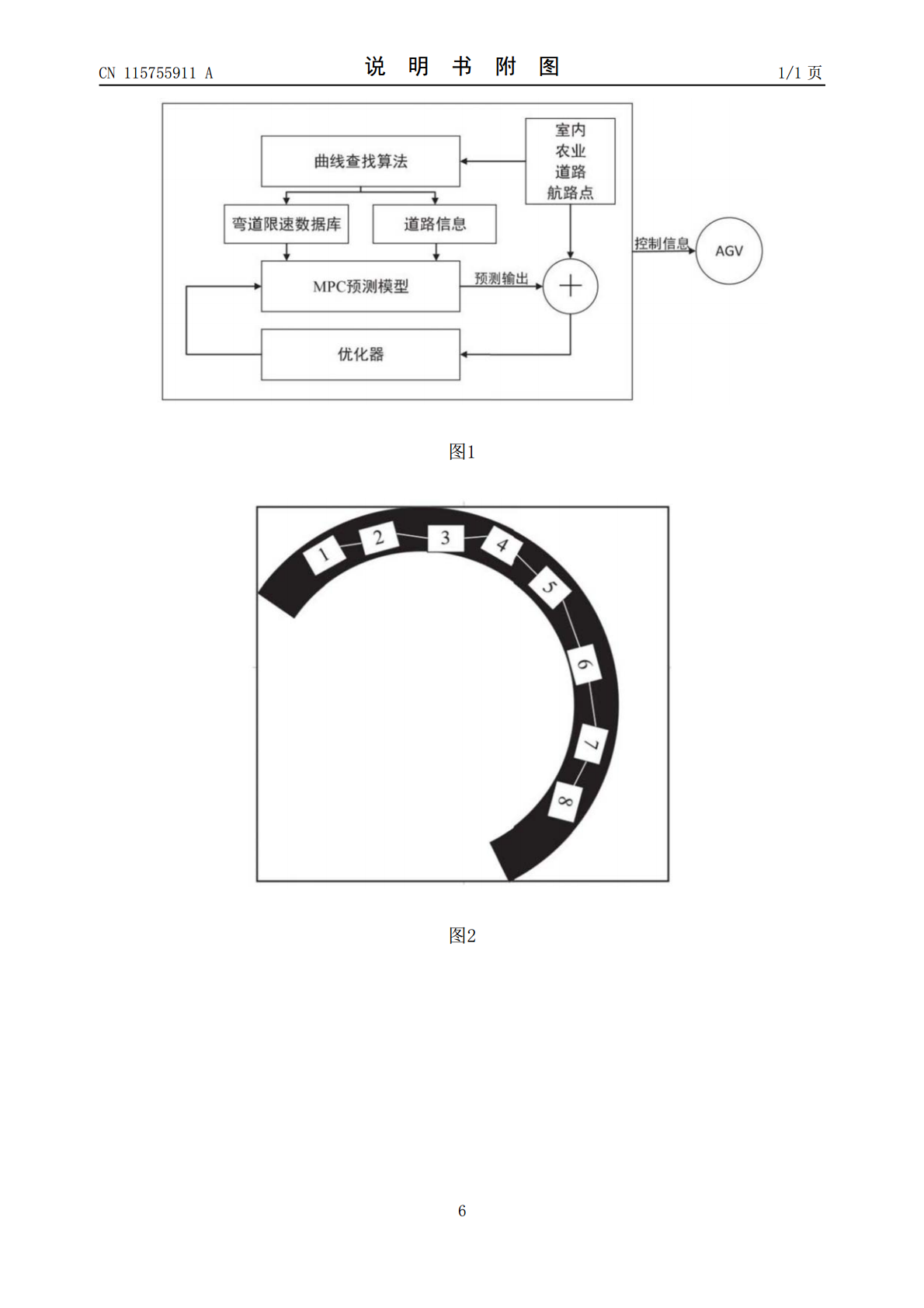
本发明提出一种基于曲线查找算法的AGV路径规划方法,该路径规划方法使用一种曲线查找算法可在混合环境中对AGV进行弯道路径规划操作。从室内、农业、道路航路点检索水平弯曲的道路信息,该路径描绘为一组由直线连接的航路点。计算航路点的多个曲线半径,并计算出平均曲线半径;得到曲线半径值、平均曲线半径后,构建弯道限速数据库,然后将其与弯道速度限制一起输入到曲线查找算法MPC预测模型中,用来预测AGV的未来动作控制直至其控制结果达到预测范围值;当车辆接近弯道时,预测模型会降低车辆的速度。与现有技术相比,本发明使用通过曲

一种基于最短路径深度优化算法的AGV路径规划方法.pdf
本发明涉及一种基于最短路径深度优化算法的AGV路径规划方法,包括:PC机调度系统接收任务请求并将请求信息发送至每台AGV车载监控管理系统;AGV车载监控管理系统将执行任务AGV的位置信息和任务请求的位置信息传递至路径优化系统;路径优化系统将最优路径的信息反馈至PC机调度系统中;AGV完成任务后,将任务完成信息反馈至PC机调度系统。本发明重新梳理AGV路径规划系统的详细优化步骤,去除传统AGV的过度复杂的流程,在保留关键流程节点的基础之上,重新规划AGV系统各个模块之间的协调工作关系。
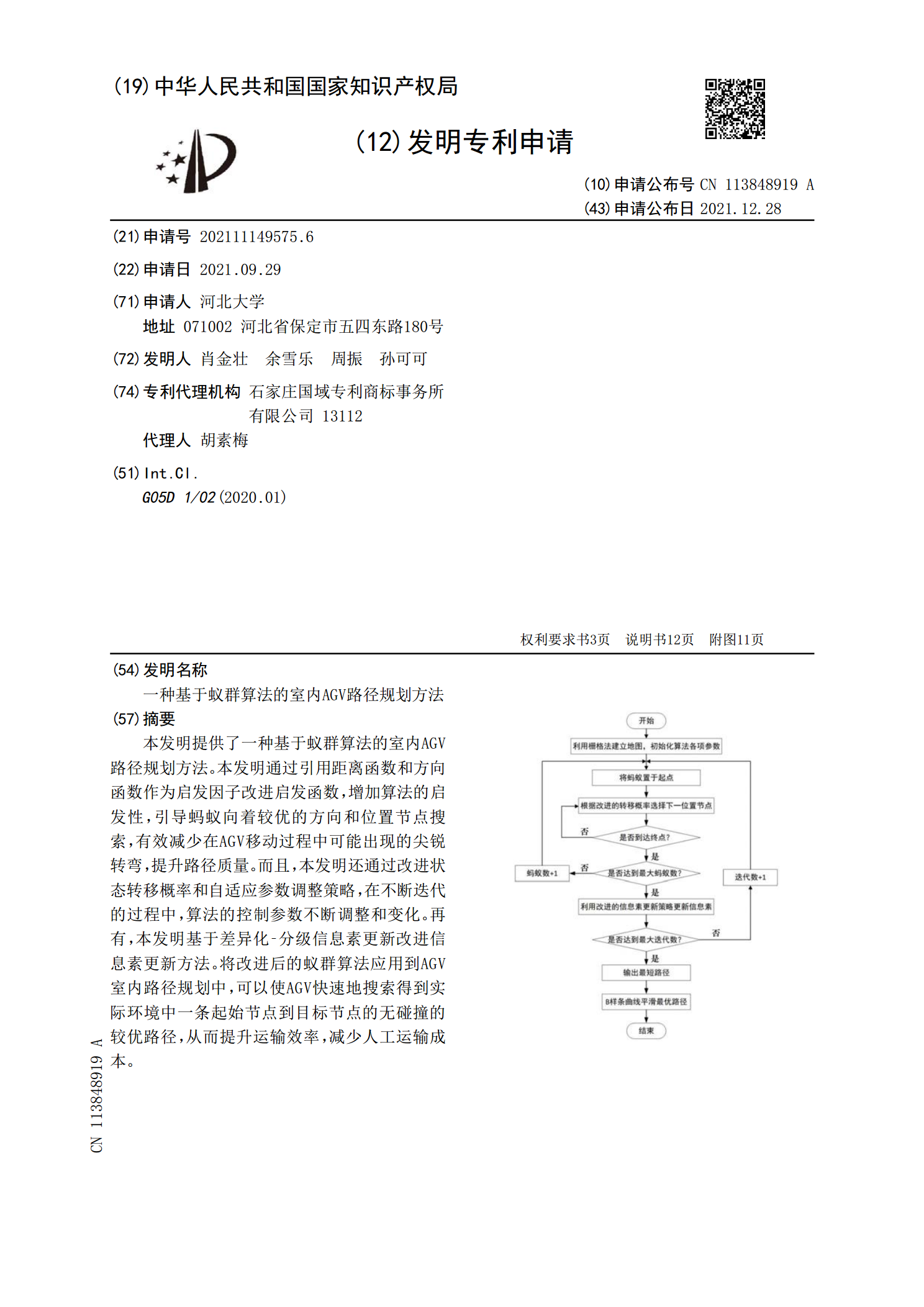
一种基于蚁群算法的室内AGV路径规划方法.pdf
本发明提供了一种基于蚁群算法的室内AGV路径规划方法。本发明通过引用距离函数和方向函数作为启发因子改进启发函数,增加算法的启发性,引导蚂蚁向着较优的方向和位置节点搜索,有效减少在AGV移动过程中可能出现的尖锐转弯,提升路径质量。而且,本发明还通过改进状态转移概率和自适应参数调整策略,在不断迭代的过程中,算法的控制参数不断调整和变化。再有,本发明基于差异化‑分级信息素更新改进信息素更新方法。将改进后的蚁群算法应用到AGV室内路径规划中,可以使AGV快速地搜索得到实际环境中一条起始节点到目标节点的无碰撞的较优

基于Memetic算法的电子AGV路径规划.docx
基于Memetic算法的电子AGV路径规划标题:基于Memetic算法的电子AGV路径规划摘要:电子自动引导车(AGV)在物流、制造和仓储领域的应用越来越广泛,路径规划是AGV系统的核心问题。本论文提出一种基于Memetic算法的电子AGV路径规划方法,旨在提高路径规划的效率和准确性。首先,介绍了AGV路径规划的背景和意义。然后,对Memetic算法的原理和特点进行了详细介绍。接着,提出了基于Memetic算法的AGV路径规划模型,并分析了模型的优势和局限性。最后,通过数值实验对该方法进行了验证,结果表明

基于改进Dijkstra算法的AGV路径规划研究.docx
基于改进Dijkstra算法的AGV路径规划研究摘要AGV(自动导引车)是近年来在物流行业中越来越普及的一种物流设备,它通过自动化技术,实现对物流运输过程的全程控制。路径规划是AGV系统中的核心环节,其决定了AGV系统的运行效率。本文基于改进Dijkstra算法的思想,研究了AGV路径规划的优化方法,并通过实验验证了算法的有效性。关键词:AGV;路径规划;改进Dijkstra算法;优化方法。1.引言近年来,随着物流行业的快速发展,AGV的普及率也越来越高,成为了物流行业中不可或缺的一部分。在AGV中,路径