
一种基于改进EM算法的局部路径规划方法、介质及设备.pdf

一只****签网

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进EM算法的局部路径规划方法、介质及设备.pdf
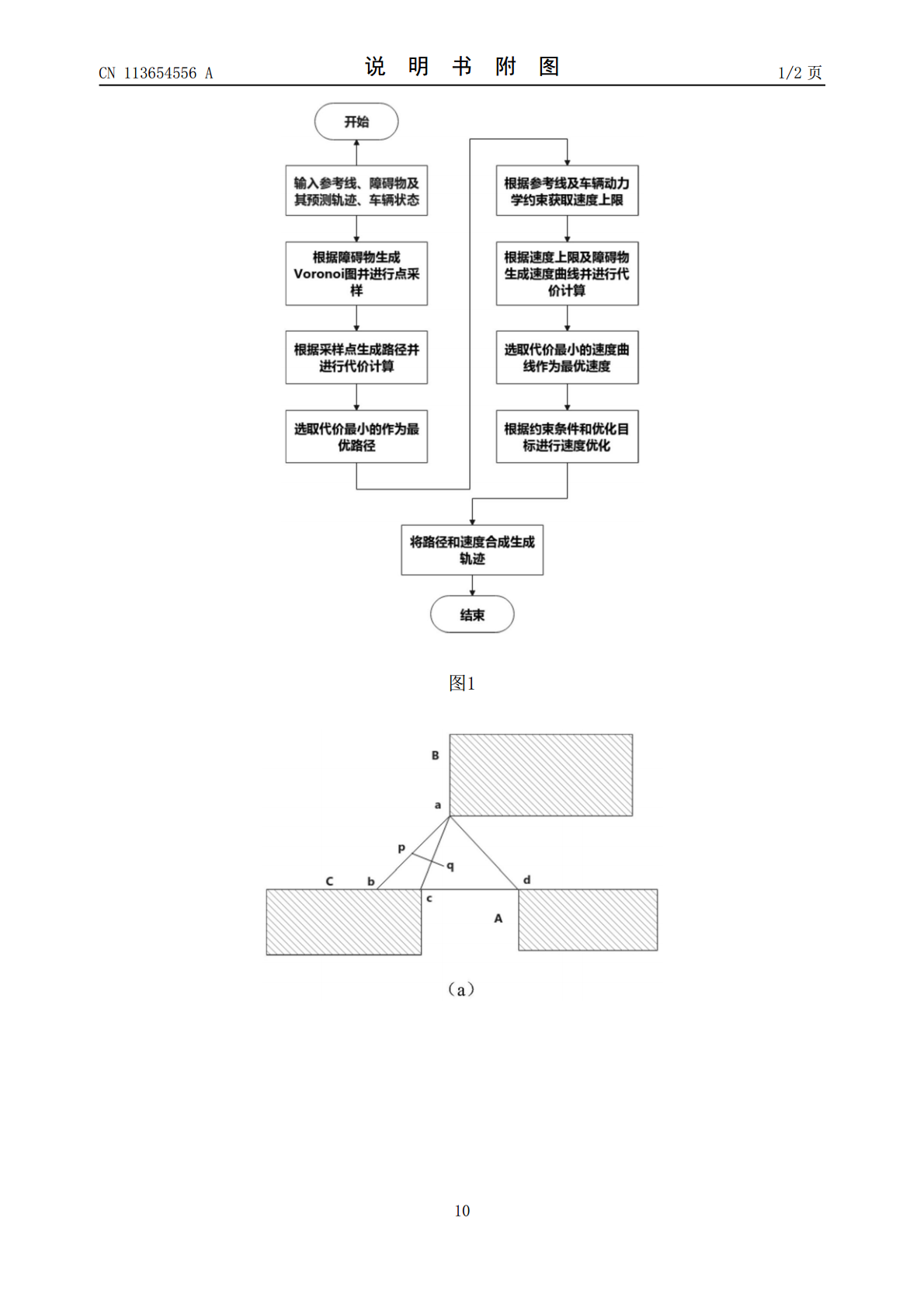
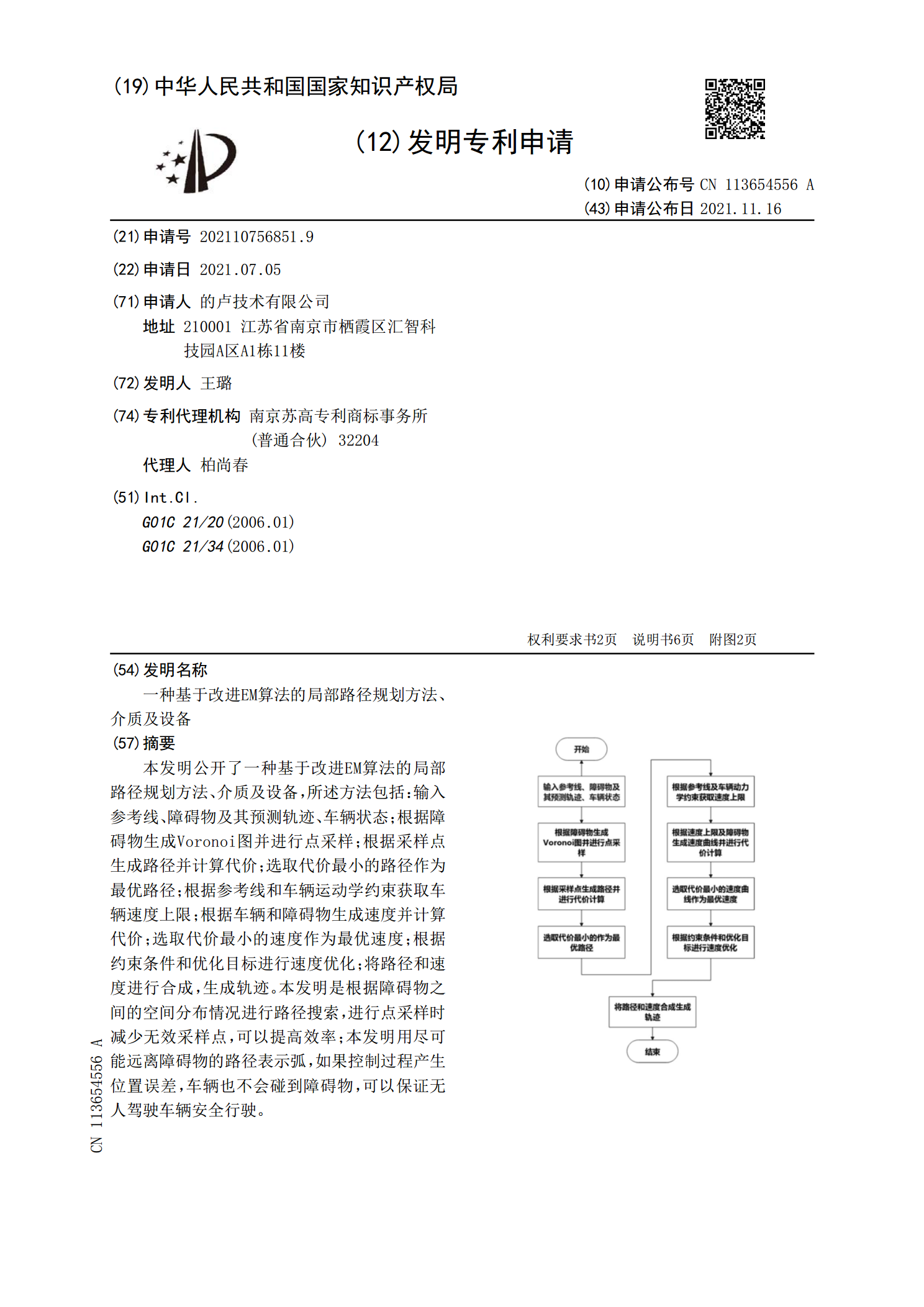
本发明公开了一种基于改进EM算法的局部路径规划方法、介质及设备,所述方法包括:输入参考线、障碍物及其预测轨迹、车辆状态;根据障碍物生成Voronoi图并进行点采样;根据采样点生成路径并计算代价;选取代价最小的路径作为最优路径;根据参考线和车辆运动学约束获取车辆速度上限;根据车辆和障碍物生成速度并计算代价;选取代价最小的速度作为最优速度;根据约束条件和优化目标进行速度优化;将路径和速度进行合成,生成轨迹。本发明是根据障碍物之间的空间分布情况进行路径搜索,进行点采样时减少无效采样点,可以提高效率;本发明用尽可

基于APF的AGV局部路径规划改进算法研究.docx
基于APF的AGV局部路径规划改进算法研究基于APF的AGV局部路径规划改进算法研究摘要:随着自动化技术的迅猛发展,自动导引车(AGV)逐渐应用于工业生产和物流行业。AGV的局部路径规划是其中的重要组成部分,决定了AGV的运动轨迹和路径选择。本文针对传统的基于人工势场法(APF)的AGV局部路径规划算法,在优化逼近和避障方面进行了改进,提出了一种改进的路径规划算法。关键词:自动导引车(AGV)、局部路径规划、人工势场法(APF)、避障、优化逼近1.引言自动导引车(AGV)是一种能够自主运行的物流设备,广泛
一种基于改进WOA算法的农机路径规划方法.pdf
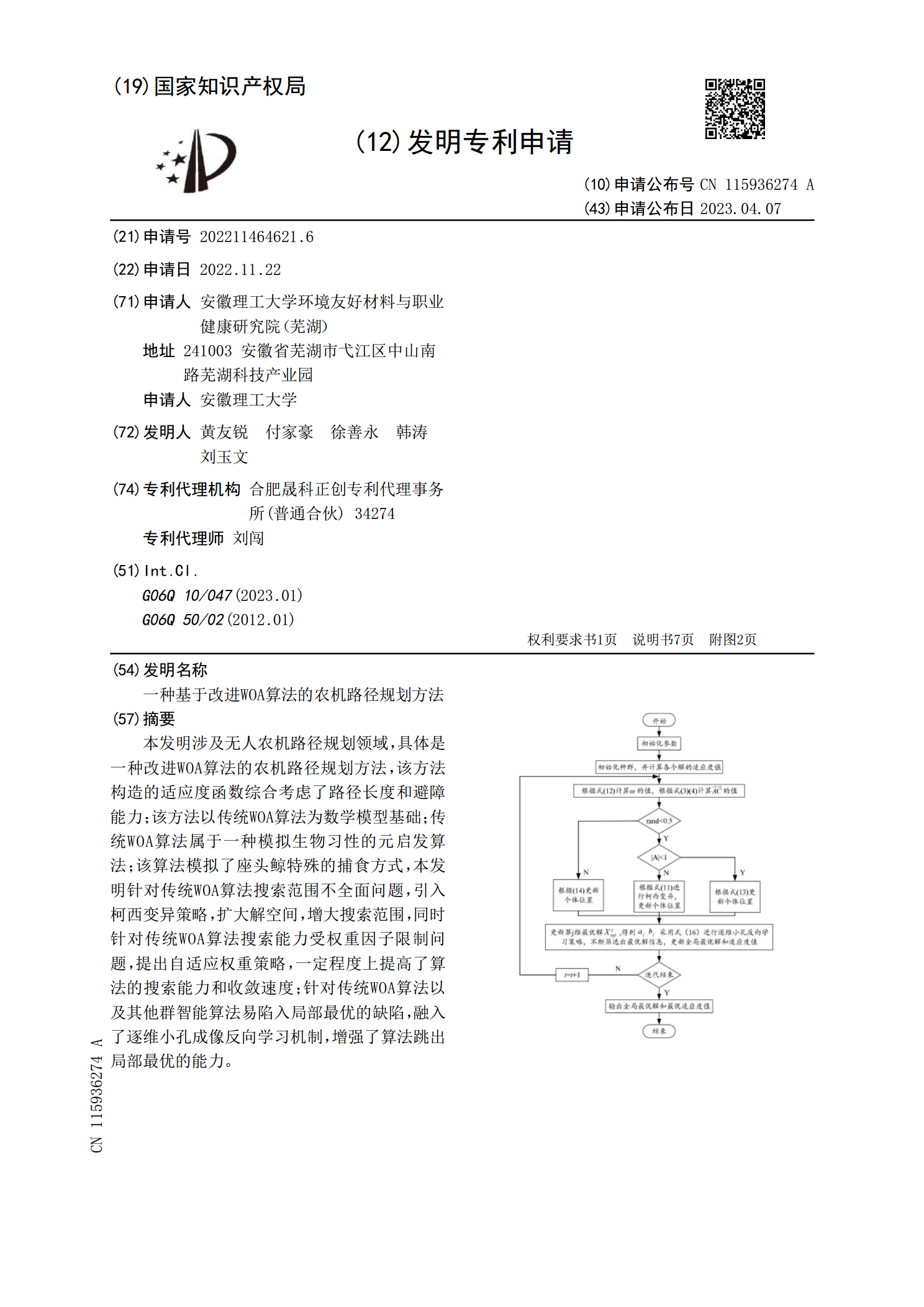
本发明涉及无人农机路径规划领域,具体是一种改进WOA算法的农机路径规划方法,该方法构造的适应度函数综合考虑了路径长度和避障能力;该方法以传统WOA算法为数学模型基础;传统WOA算法属于一种模拟生物习性的元启发算法;该算法模拟了座头鲸特殊的捕食方式,本发明针对传统WOA算法搜索范围不全面问题,引入柯西变异策略,扩大解空间,增大搜索范围,同时针对传统WOA算法搜索能力受权重因子限制问题,提出自适应权重策略,一定程度上提高了算法的搜索能力和收敛速度;针对传统WOA算法以及其他群智能算法易陷入局部最优的缺陷,融入
一种基于改进蚁群算法的路径规划方法.pdf
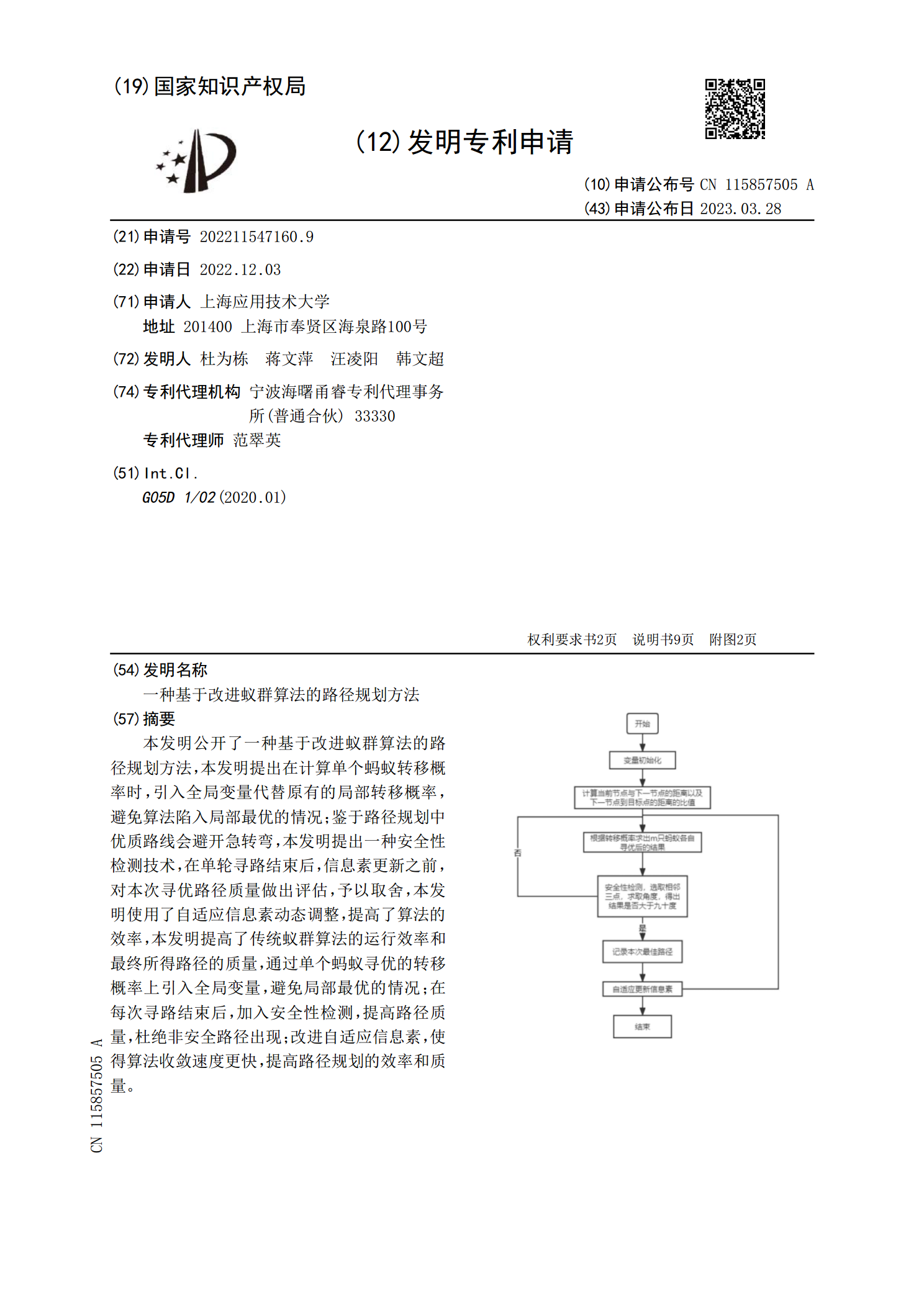
本发明公开了一种基于改进蚁群算法的路径规划方法,本发明提出在计算单个蚂蚁转移概率时,引入全局变量代替原有的局部转移概率,避免算法陷入局部最优的情况;鉴于路径规划中优质路线会避开急转弯,本发明提出一种安全性检测技术,在单轮寻路结束后,信息素更新之前,对本次寻优路径质量做出评估,予以取舍,本发明使用了自适应信息素动态调整,提高了算法的效率,本发明提高了传统蚁群算法的运行效率和最终所得路径的质量,通过单个蚂蚁寻优的转移概率上引入全局变量,避免局部最优的情况;在每次寻路结束后,加入安全性检测,提高路径质量,杜绝非
一种基于改进蚁群算法的路径规划方法.pdf
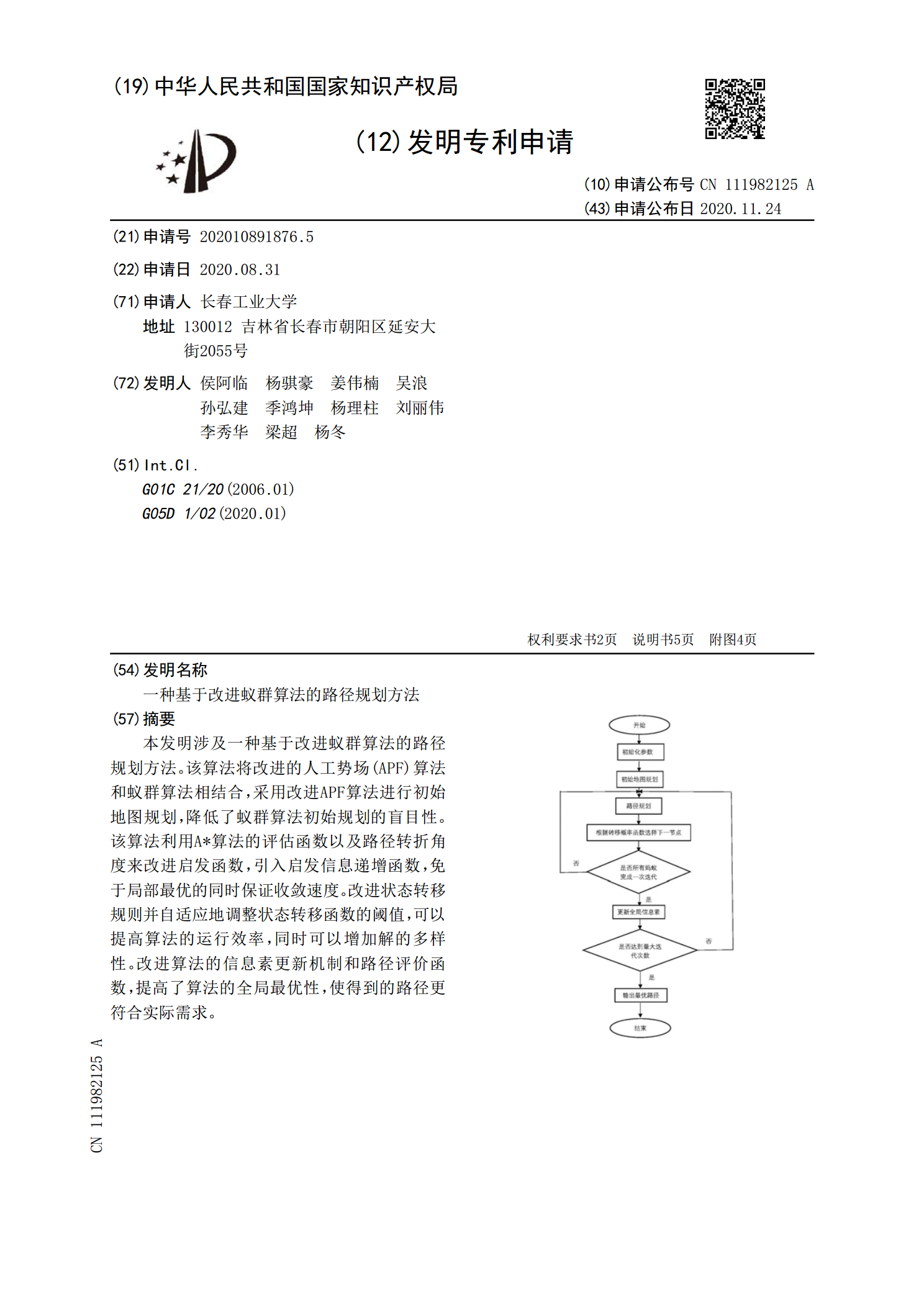
本发明涉及一种基于改进蚁群算法的路径规划方法。该算法将改进的人工势场(APF)算法和蚁群算法相结合,采用改进APF算法进行初始地图规划,降低了蚁群算法初始规划的盲目性。该算法利用A*算法的评估函数以及路径转折角度来改进启发函数,引入启发信息递增函数,免于局部最优的同时保证收敛速度。改进状态转移规则并自适应地调整状态转移函数的阈值,可以提高算法的运行效率,同时可以增加解的多样性。改进算法的信息素更新机制和路径评价函数,提高了算法的全局最优性,使得到的路径更符合实际需求。