
轮毂电机驱动车辆线控差动转向的研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮毂电机驱动车辆线控差动转向的研究.docx
轮毂电机驱动车辆线控差动转向的研究论文题目:轮毂电机驱动车辆线控差动转向的研究摘要:差动转向是指通过分配驱动轮的不同转速实现转向动作。传统的车辆转向方式主要依赖于转向轮的角度调节,但是这种方式存在一定的局限性。随着轮毂电机技术的发展,利用电机驱动车辆的差动转向方式成为了一种新的研究方向。本论文以轮毂电机驱动车辆线控差动转向为研究对象,对其原理、算法及实验结果进行分析和探讨。1.引言1.1研究背景1.2研究意义2.轮毂电机驱动车辆的差动转向原理2.1轮毂电机概述2.2差动转向原理2.3差动转向控制算法3.实
一种多轴轮毂电机驱动车辆后轮线控转向驱动装置及其转向方法.pdf
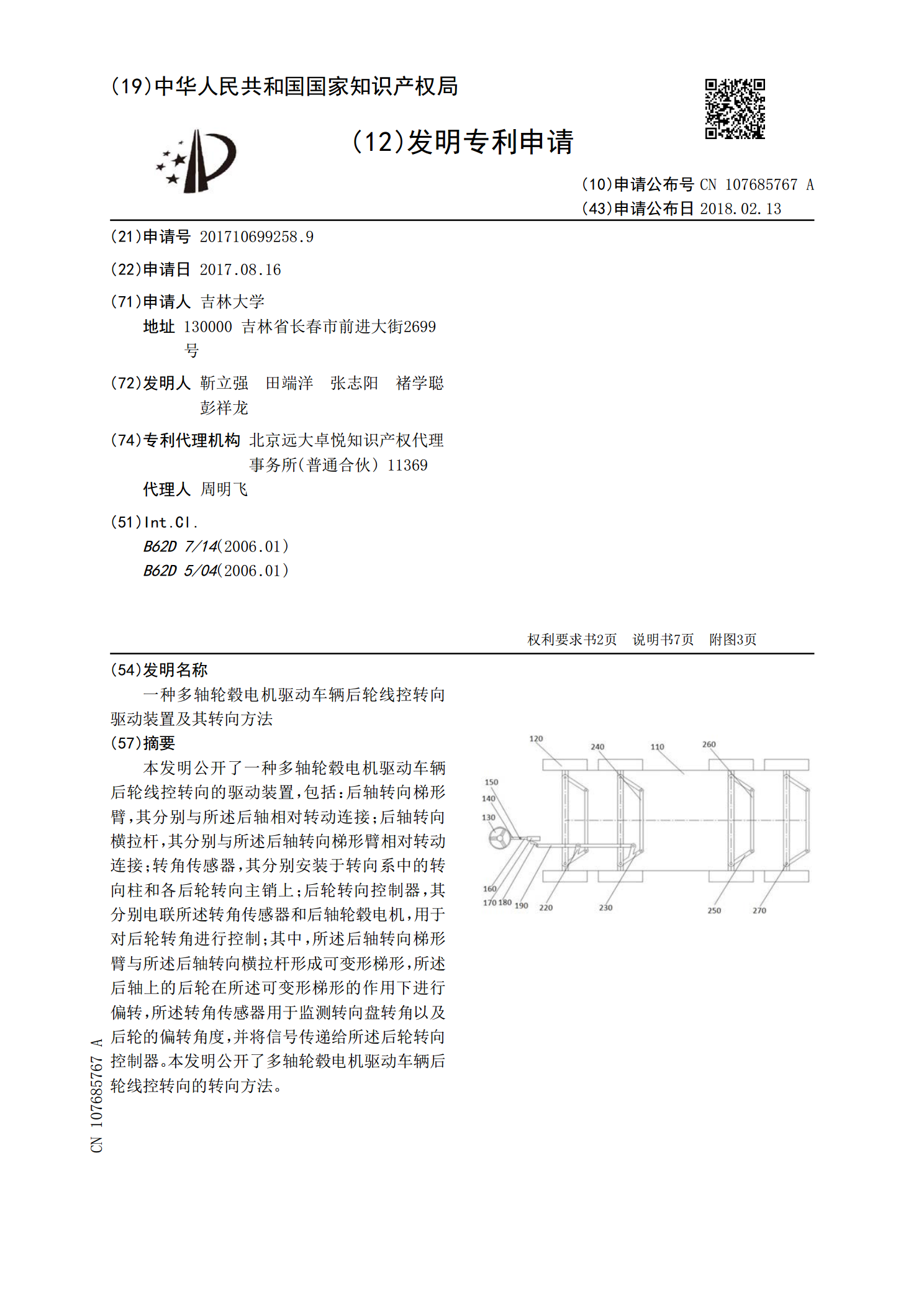
本发明公开了一种多轴轮毂电机驱动车辆后轮线控转向的驱动装置,包括:后轴转向梯形臂,其分别与所述后轴相对转动连接;后轴转向横拉杆,其分别与所述后轴转向梯形臂相对转动连接;转角传感器,其分别安装于转向系中的转向柱和各后轮转向主销上;后轮转向控制器,其分别电联所述转角传感器和后轴轮毂电机,用于对后轮转角进行控制;其中,所述后轴转向梯形臂与所述后轴转向横拉杆形成可变形梯形,所述后轴上的后轮在所述可变形梯形的作用下进行偏转,所述转角传感器用于监测转向盘转角以及后轮的偏转角度,并将信号传递给所述后轮转向控制器。本发明
用于轮式独立驱动车辆的线控差动转向系统及其控制方法.pdf
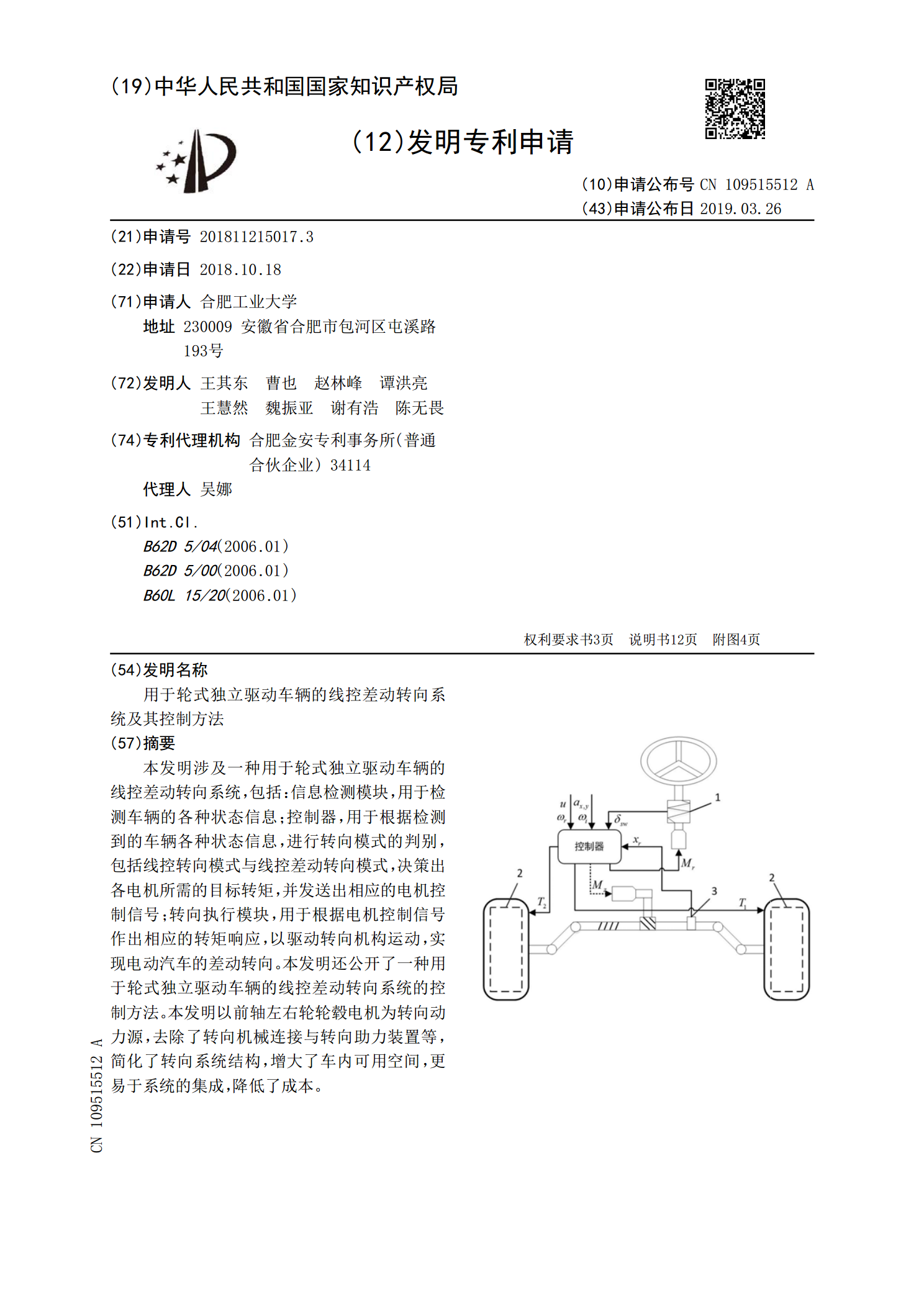
本发明涉及一种用于轮式独立驱动车辆的线控差动转向系统,包括:信息检测模块,用于检测车辆的各种状态信息;控制器,用于根据检测到的车辆各种状态信息,进行转向模式的判别,包括线控转向模式与线控差动转向模式,决策出各电机所需的目标转矩,并发送出相应的电机控制信号;转向执行模块,用于根据电机控制信号作出相应的转矩响应,以驱动转向机构运动,实现电动汽车的差动转向。本发明还公开了一种用于轮式独立驱动车辆的线控差动转向系统的控制方法。本发明以前轴左右轮轮毂电机为转向动力源,去除了转向机械连接与转向助力装置等,简化了转向系
用于轮毂驱动车辆的转向系统及轮毂驱动车辆.pdf
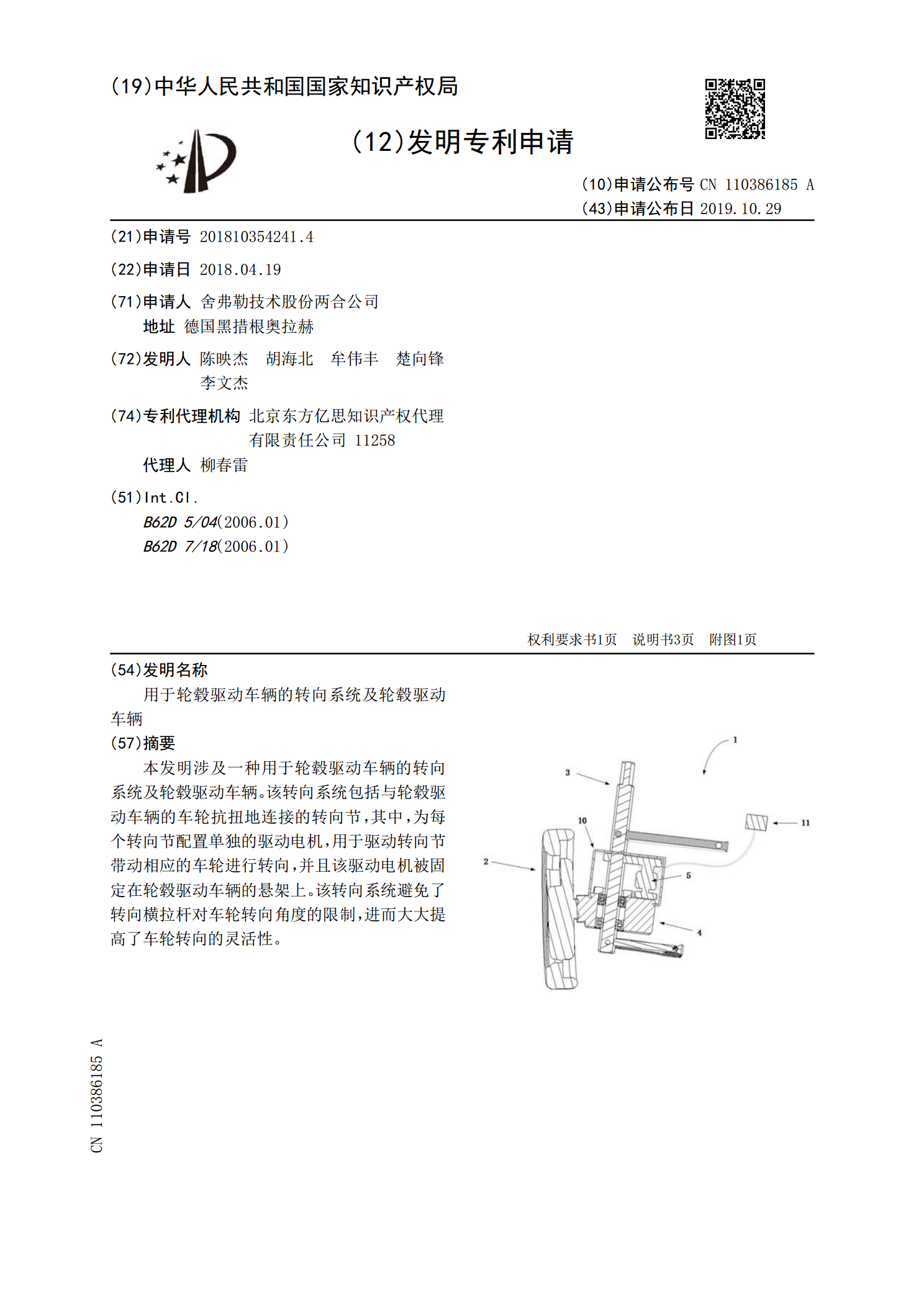
本发明涉及一种用于轮毂驱动车辆的转向系统及轮毂驱动车辆。该转向系统包括与轮毂驱动车辆的车轮抗扭地连接的转向节,其中,为每个转向节配置单独的驱动电机,用于驱动转向节带动相应的车轮进行转向,并且该驱动电机被固定在轮毂驱动车辆的悬架上。该转向系统避免了转向横拉杆对车轮转向角度的限制,进而大大提高了车轮转向的灵活性。
轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法.pdf
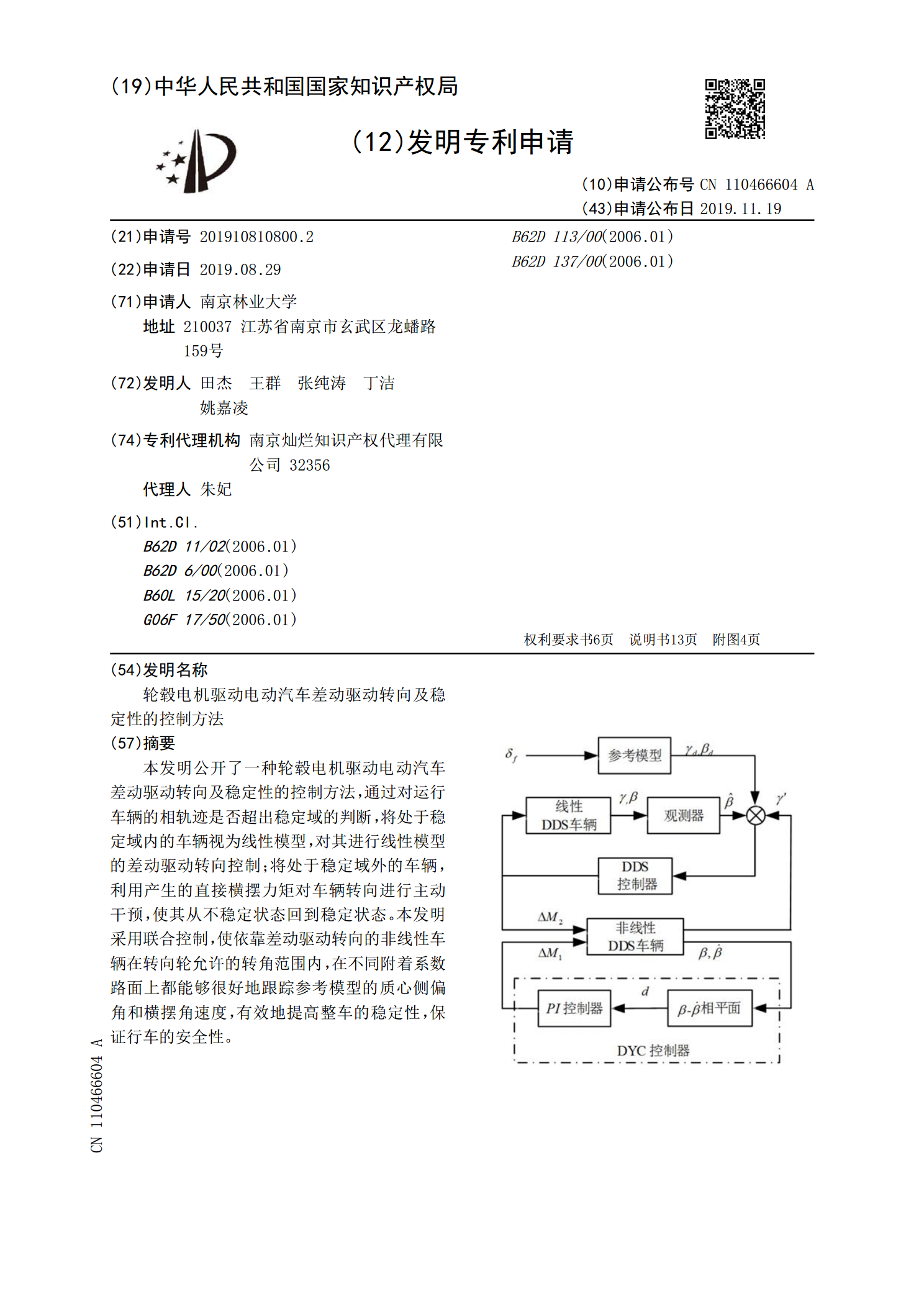
本发明公开了一种轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法,通过对运行车辆的相轨迹是否超出稳定域的判断,将处于稳定域内的车辆视为线性模型,对其进行线性模型的差动驱动转向控制;将处于稳定域外的车辆,利用产生的直接横摆力矩对车辆转向进行主动干预,使其从不稳定状态回到稳定状态。本发明采用联合控制,使依靠差动驱动转向的非线性车辆在转向轮允许的转角范围内,在不同附着系数路面上都能够很好地跟踪参考模型的质心侧偏角和横摆角速度,有效地提高整车的稳定性,保证行车的安全性。