
用于轮式独立驱动车辆的线控差动转向系统及其控制方法.pdf

一吃****成益

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于轮式独立驱动车辆的线控差动转向系统及其控制方法.pdf
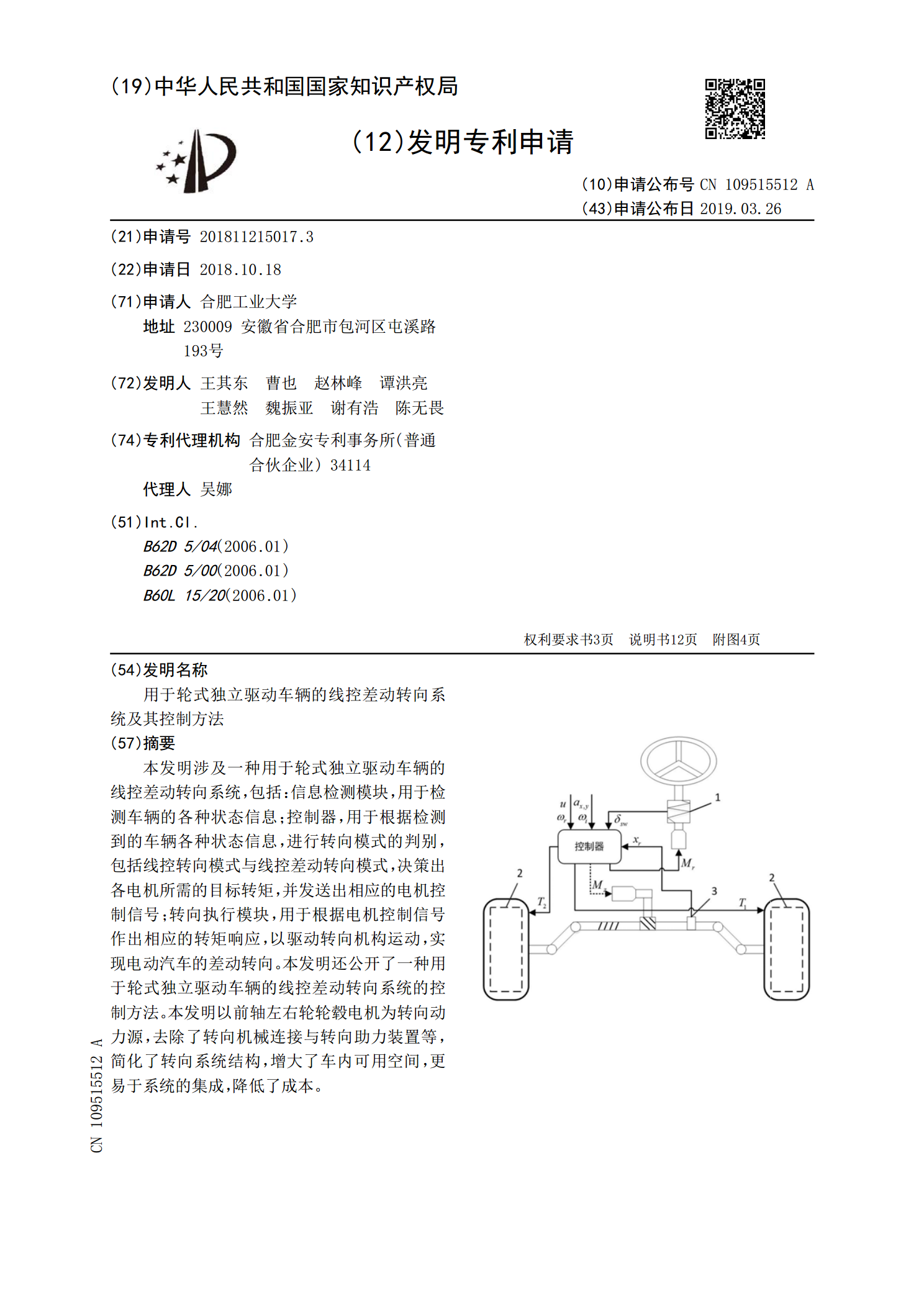
本发明涉及一种用于轮式独立驱动车辆的线控差动转向系统,包括:信息检测模块,用于检测车辆的各种状态信息;控制器,用于根据检测到的车辆各种状态信息,进行转向模式的判别,包括线控转向模式与线控差动转向模式,决策出各电机所需的目标转矩,并发送出相应的电机控制信号;转向执行模块,用于根据电机控制信号作出相应的转矩响应,以驱动转向机构运动,实现电动汽车的差动转向。本发明还公开了一种用于轮式独立驱动车辆的线控差动转向系统的控制方法。本发明以前轴左右轮轮毂电机为转向动力源,去除了转向机械连接与转向助力装置等,简化了转向系

单轴独立驱动铰接转向车辆差动协同转向系统及其控制方法.pdf
本发明公开了单轴独立驱动铰接转向车辆差动协同转向系统,通过与铰接转向车辆原有的液压转向系统相互配合,能有效的提高铰接转向车辆的转向灵活性,降低转向能耗。本发明还公开了单轴独立驱动铰接转向车辆差动协同转向系统的控制方法,根据方向盘角速度采用比例控制器计算出合适的差动转矩施加到驱动轴左右两侧驱动轮上,使一侧驱动轮转矩增加的同时另一侧驱动轮转矩减小,从而形成一个直接横摆力矩,与液压转向系统协同作用实现车辆转向。从而达到减少转向时间,降低液压转向系统能耗的目的。
用于四轮独立电驱动车辆线控转向系统传动比的设计方法.pdf
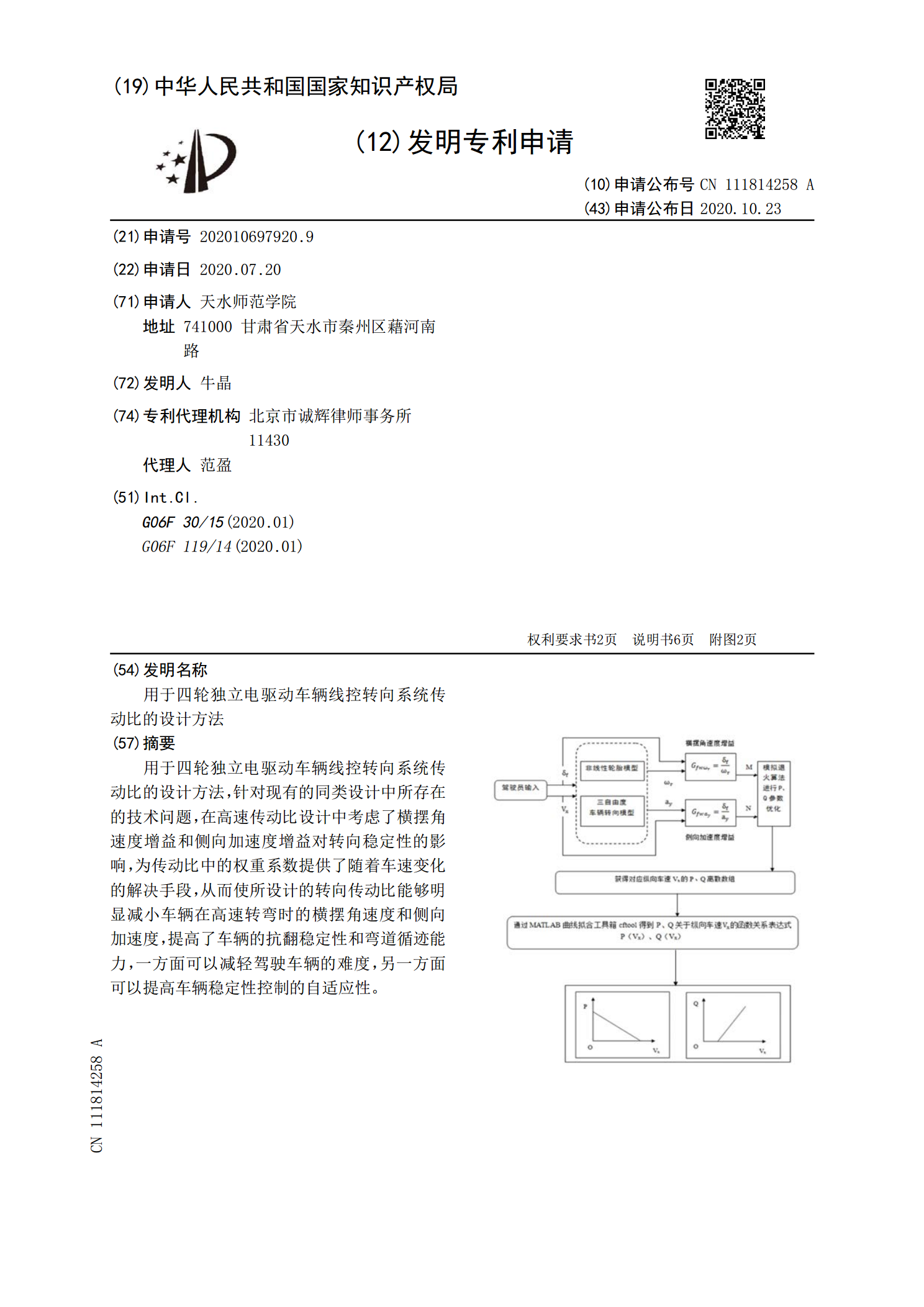
用于四轮独立电驱动车辆线控转向系统传动比的设计方法,针对现有的同类设计中所存在的技术问题,在高速传动比设计中考虑了横摆角速度增益和侧向加速度增益对转向稳定性的影响,为传动比中的权重系数提供了随着车速变化的解决手段,从而使所设计的转向传动比能够明显减小车辆在高速转弯时的横摆角速度和侧向加速度,提高了车辆的抗翻稳定性和弯道循迹能力,一方面可以减轻驾驶车辆的难度,另一方面可以提高车辆稳定性控制的自适应性。
车辆及其线控转向系统前轮驱动控制方法、装置.pdf
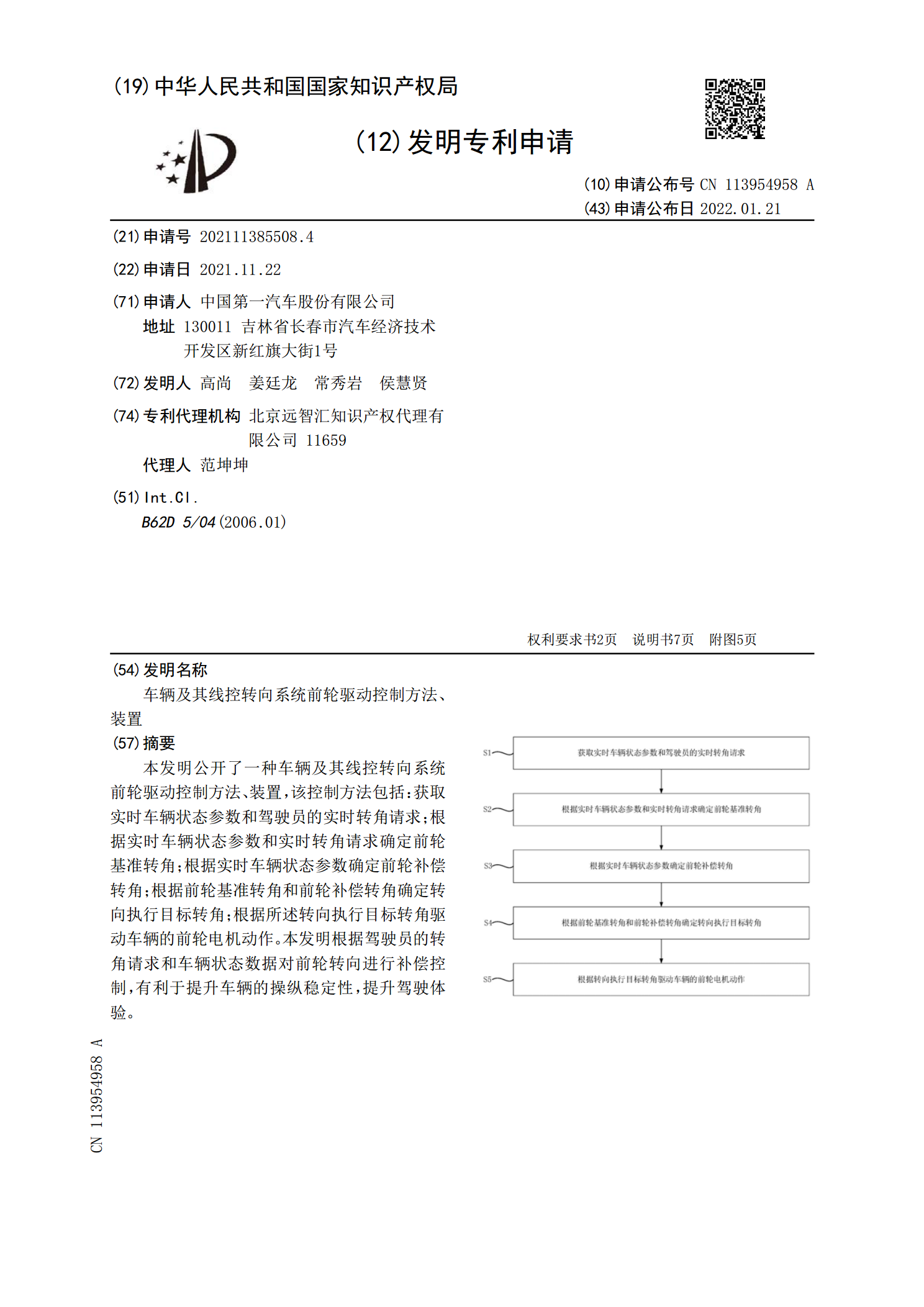
本发明公开了一种车辆及其线控转向系统前轮驱动控制方法、装置,该控制方法包括:获取实时车辆状态参数和驾驶员的实时转角请求;根据实时车辆状态参数和实时转角请求确定前轮基准转角;根据实时车辆状态参数确定前轮补偿转角;根据前轮基准转角和前轮补偿转角确定转向执行目标转角;根据所述转向执行目标转角驱动车辆的前轮电机动作。本发明根据驾驶员的转角请求和车辆状态数据对前轮转向进行补偿控制,有利于提升车辆的操纵稳定性,提升驾驶体验。

轮毂电机驱动车辆线控差动转向的研究.docx
轮毂电机驱动车辆线控差动转向的研究论文题目:轮毂电机驱动车辆线控差动转向的研究摘要:差动转向是指通过分配驱动轮的不同转速实现转向动作。传统的车辆转向方式主要依赖于转向轮的角度调节,但是这种方式存在一定的局限性。随着轮毂电机技术的发展,利用电机驱动车辆的差动转向方式成为了一种新的研究方向。本论文以轮毂电机驱动车辆线控差动转向为研究对象,对其原理、算法及实验结果进行分析和探讨。1.引言1.1研究背景1.2研究意义2.轮毂电机驱动车辆的差动转向原理2.1轮毂电机概述2.2差动转向原理2.3差动转向控制算法3.实