
电液伺服系统的一种新的补偿方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电液伺服系统的一种新的补偿方法.docx
电液伺服系统的一种新的补偿方法论文题目:基于前馈控制的电液伺服系统新的补偿方法摘要:电液伺服系统是现代机械控制系统中广泛应用的一种系统结构。然而,由于其动态响应特性受到外部扰动和内部参数变化的影响,系统的性能和稳定性常常受到限制。为了提高系统的性能和稳定性,目前已经提出了多种补偿方法。本文针对电液伺服系统,提出了一种基于前馈控制的新的补偿方法。通过将前馈控制技术与传统的PID控制相结合,实现系统对扰动和参数变化的有效补偿。该方法在不改变系统原有结构的情况下,能够显著提高电液伺服系统的性能和稳定性。1.引言

间隙非线性对电液位置伺服系统的影响及其补偿方法研究.docx
间隙非线性对电液位置伺服系统的影响及其补偿方法研究隙间非线性是传统电液位置伺服系统中的一个经典问题,其产生主要是由于伺服阀在运动时所产生的摩擦、弹性变形和导管液体的压缩等因素所造成的。这些因素的综合作用使得伺服阀的实际运动情况与理论预期有所不同,造成了电液位置伺服系统控制精度的降低和系统的稳定性变差,从而制约了整个系统的性能。间隙非线性对于电液位置伺服系统的影响主要表现在以下几个方面:一、位置误差增大。由于伺服阀的间隙非线性作用,使得伺服阀的实际运动情况与理论预期有所偏差,导致系统输出的位置偏离理论值,这

基于模糊PID信号补偿的电液伺服系统容错控制方法研究.pptx
汇报人:目录PARTONE模糊PID控制原理模糊PID补偿算法模糊PID补偿的优势模糊PID补偿的局限性PARTTWO电液伺服系统的基本原理容错控制的概念和重要性电液伺服系统容错控制方法分类现有容错控制方法的优缺点PARTTHREE设计思路和原则具体设计步骤和方法与传统方法的比较实验验证和结果分析PARTFOUR在工业自动化领域的应用前景在机器人和航空航天领域的应用前景未来的研究方向和挑战对相关领域的影响和贡献THANKYOU
一种电液伺服系统.pdf
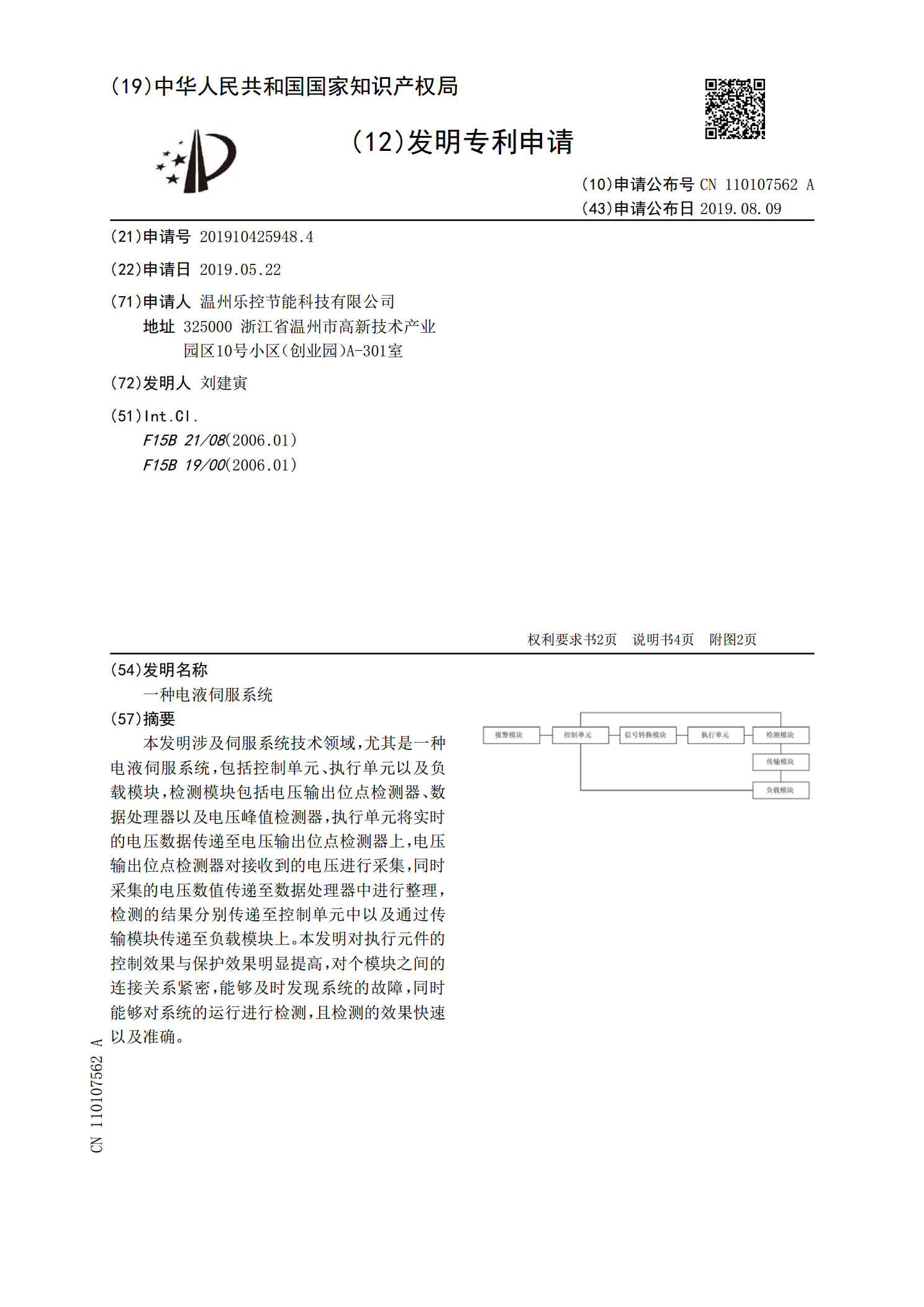
本发明涉及伺服系统技术领域,尤其是一种电液伺服系统,包括控制单元、执行单元以及负载模块,检测模块包括电压输出位点检测器、数据处理器以及电压峰值检测器,执行单元将实时的电压数据传递至电压输出位点检测器上,电压输出位点检测器对接收到的电压进行采集,同时采集的电压数值传递至数据处理器中进行整理,检测的结果分别传递至控制单元中以及通过传输模块传递至负载模块上。本发明对执行元件的控制效果与保护效果明显提高,对个模块之间的连接关系紧密,能够及时发现系统的故障,同时能够对系统的运行进行检测,且检测的效果快速以及准确。

一种电液伺服系统.pdf
本发明为一种电液伺服系统,包括PLC控制单元、伺服驱动器、伺服电机、齿轮泵、传感器,PLC控制单元通过传递信号至所述伺服驱动器,伺服驱动器控制伺服电机运转,伺服电机带动所述齿轮泵工作,传感器将所述齿轮泵的动态输出传递至伺服驱动器进行动态调节。本发明的有益效果是:大大的提高了整个系统的节能性、精密性、高效性和环保性。