
弧焊机器人焊缝轨迹检测及自动寻位系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

弧焊机器人焊缝轨迹检测及自动寻位系统.docx
弧焊机器人焊缝轨迹检测及自动寻位系统标题:弧焊机器人焊缝轨迹检测及自动寻位系统摘要:随着现代制造业的发展,弧焊机器人在焊接过程中扮演着越来越重要的角色。然而,由于焊缝的尺寸和形状不同,机器人在焊接过程中存在缺陷和误差。为此,本文提出了一种弧焊机器人焊缝轨迹检测及自动寻位系统,旨在提高机器人在焊接过程中的准确性和效率。该系统利用视觉检测技术识别焊缝,并通过自动寻位系统实现焊枪和焊缝的对准。实验结果表明,该系统能够有效地检测焊缝轨迹并实现自动寻位,为弧焊机器人的应用提供了新的解决方案。关键词:弧焊机器人,焊缝

一种基于机器视觉的焊缝轨迹自主寻位装置、系统及方法.pdf
本发明涉及一种基于机器视觉的焊缝轨迹自主寻位装置、系统及方法,其中一种基于机器视觉的焊缝轨迹自主寻位装置包括伸缩机构和焊缝寻位器,所述焊缝寻位器与焊接机器人的激光焊接头通过所述伸缩机构连接。本发明的所述焊缝寻位器通过所述伸缩机构相对于所述激光焊接头的坐标系,可在Z轴方向移动;同时所述焊缝寻位器内的测距传感器相对于所述激光焊接头的坐标系,可在X轴和Y轴方向移动,使所述测距传感器可以扫描采集所述激光焊接头的三维轮廓数据,解决了测距传感器扫描激光束在T形接头焊缝周围多重反射形成盲区问题,具备焊缝轨迹测量及焊缝轨
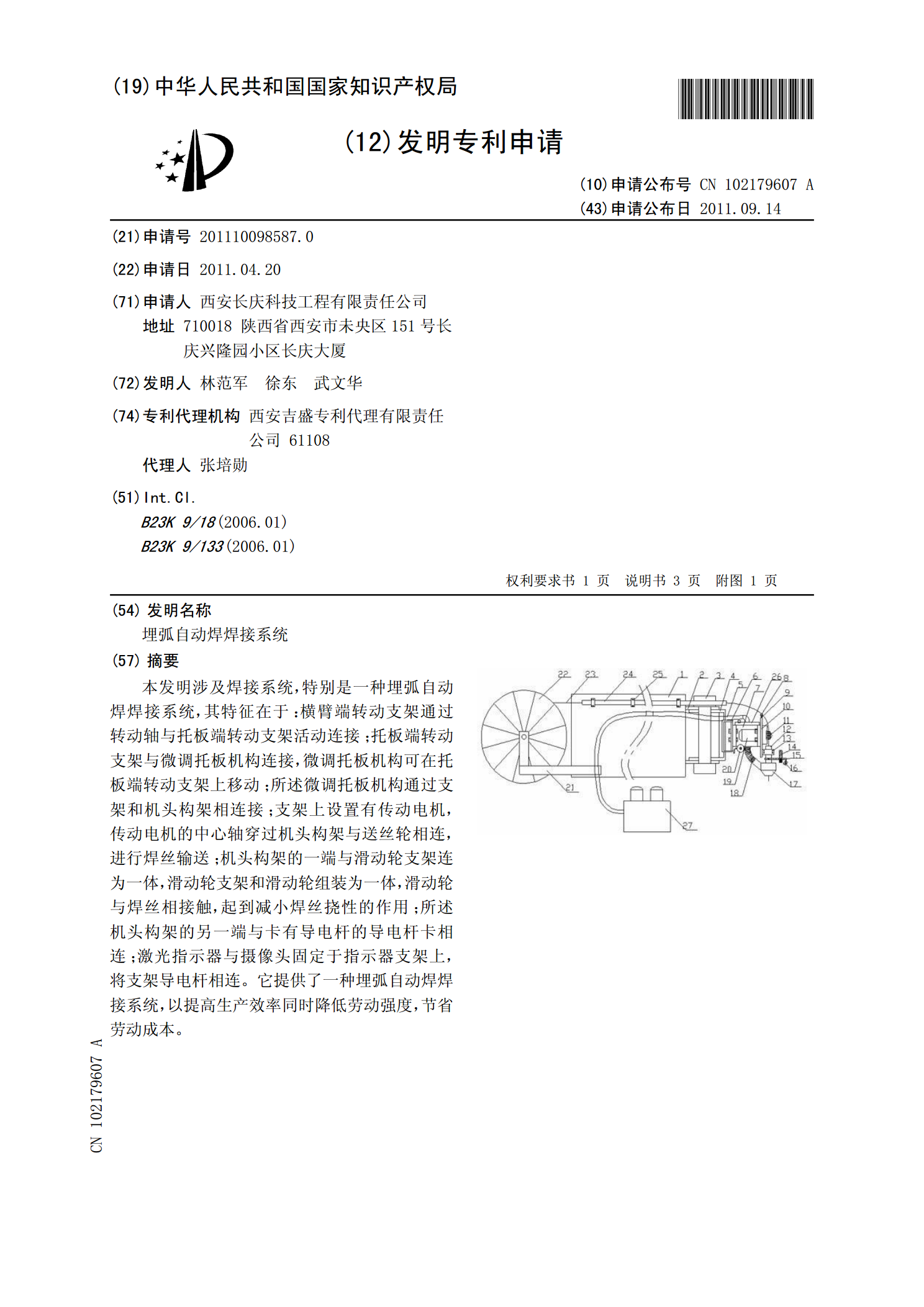
埋弧自动焊焊接系统.pdf
本发明涉及焊接系统,特别是一种埋弧自动焊焊接系统,其特征在于:横臂端转动支架通过转动轴与托板端转动支架活动连接;托板端转动支架与微调托板机构连接,微调托板机构可在托板端转动支架上移动;所述微调托板机构通过支架和机头构架相连接;支架上设置有传动电机,传动电机的中心轴穿过机头构架与送丝轮相连,进行焊丝输送;机头构架的一端与滑动轮支架连为一体,滑动轮支架和滑动轮组装为一体,滑动轮与焊丝相接触,起到减小焊丝挠性的作用;所述机头构架的另一端与卡有导电杆的导电杆卡相连;激光指示器与摄像头固定于指示器支架上,将支架导电

埋弧焊钢管焊缝DR检测机理及应用.docx
埋弧焊钢管焊缝DR检测机理及应用摘要随着我国工业的快速发展,钢管的使用率也越来越高。而钢管不可避免地需要进行连接焊接,因此焊缝质量的检测显得至关重要。埋弧焊是一种常见的钢管连接焊接方法,而DR检测技术可以在不破坏钢管的情况下对焊缝进行精确的质量检测。本文对埋弧焊钢管焊缝DR检测的机理和应用进行了详细的介绍和探讨,以期对相关领域的研究和应用产生一定的启发和帮助。关键词:埋弧焊;钢管焊缝;DR检测;机理;应用一、引言钢管是现代建筑、工程和其他领域中都得到广泛应用的一种重要材料。不同的项目需要不同规格的钢管,有
机器人弧焊系统示教程序纠偏式激光焊缝跟踪技术研究.pdf
机器人弧焊系统示教程序纠偏式激光焊缝跟踪技术研究钱金法;周斌;周英华;殷荣幸【期刊名称】《科技创新导报》【年(卷),期】2015(000)031【摘要】Weldingseamtrackingsystemcaneffectivelyimprovetheweldingqualityofrobot.Thestructureoflaserweldingseamtrackingsystemofarcweldingrobotincludeslasersensor,computer,robotcontroller,ro