
一种基于机器视觉的焊缝轨迹自主寻位装置、系统及方法.pdf

书生****22


1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于机器视觉的焊缝轨迹自主寻位装置、系统及方法.pdf
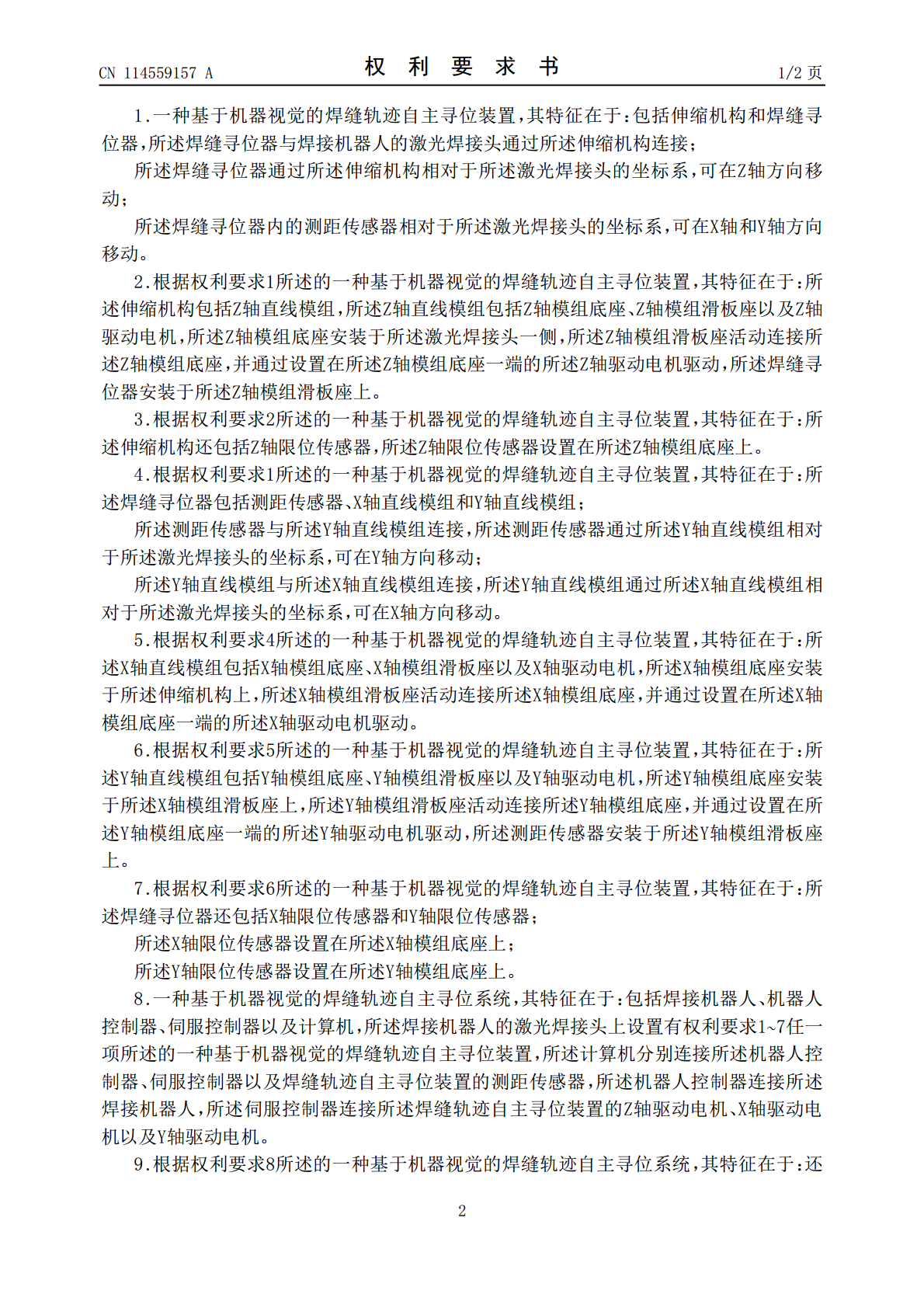
本发明涉及一种基于机器视觉的焊缝轨迹自主寻位装置、系统及方法,其中一种基于机器视觉的焊缝轨迹自主寻位装置包括伸缩机构和焊缝寻位器,所述焊缝寻位器与焊接机器人的激光焊接头通过所述伸缩机构连接。本发明的所述焊缝寻位器通过所述伸缩机构相对于所述激光焊接头的坐标系,可在Z轴方向移动;同时所述焊缝寻位器内的测距传感器相对于所述激光焊接头的坐标系,可在X轴和Y轴方向移动,使所述测距传感器可以扫描采集所述激光焊接头的三维轮廓数据,解决了测距传感器扫描激光束在T形接头焊缝周围多重反射形成盲区问题,具备焊缝轨迹测量及焊缝轨

弧焊机器人焊缝轨迹检测及自动寻位系统.docx
弧焊机器人焊缝轨迹检测及自动寻位系统标题:弧焊机器人焊缝轨迹检测及自动寻位系统摘要:随着现代制造业的发展,弧焊机器人在焊接过程中扮演着越来越重要的角色。然而,由于焊缝的尺寸和形状不同,机器人在焊接过程中存在缺陷和误差。为此,本文提出了一种弧焊机器人焊缝轨迹检测及自动寻位系统,旨在提高机器人在焊接过程中的准确性和效率。该系统利用视觉检测技术识别焊缝,并通过自动寻位系统实现焊枪和焊缝的对准。实验结果表明,该系统能够有效地检测焊缝轨迹并实现自动寻位,为弧焊机器人的应用提供了新的解决方案。关键词:弧焊机器人,焊缝
一种基于机器视觉的焊缝打磨装置及其系统.pdf
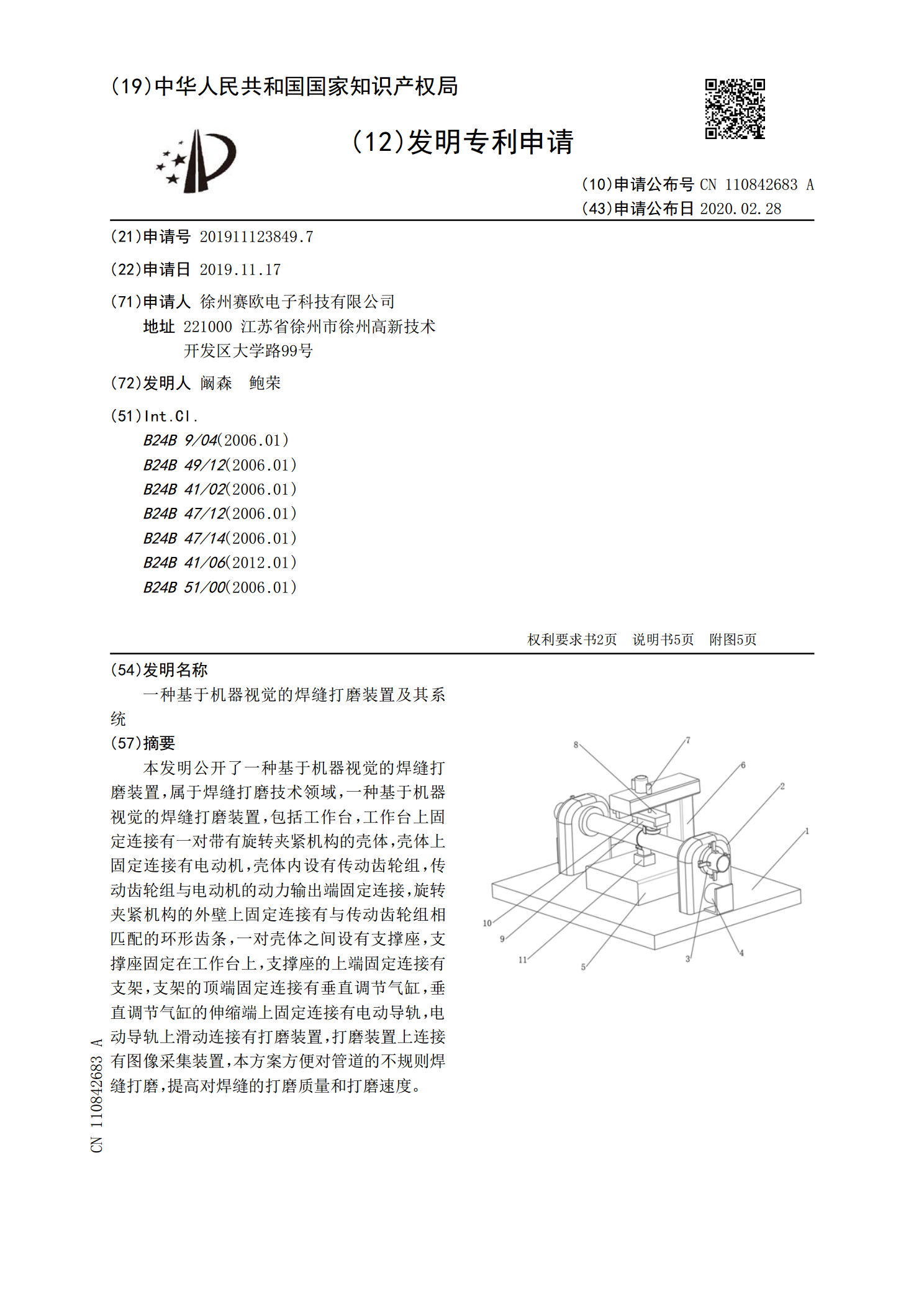
本发明公开了一种基于机器视觉的焊缝打磨装置,属于焊缝打磨技术领域,一种基于机器视觉的焊缝打磨装置,包括工作台,工作台上固定连接有一对带有旋转夹紧机构的壳体,壳体上固定连接有电动机,壳体内设有传动齿轮组,传动齿轮组与电动机的动力输出端固定连接,旋转夹紧机构的外壁上固定连接有与传动齿轮组相匹配的环形齿条,一对壳体之间设有支撑座,支撑座固定在工作台上,支撑座的上端固定连接有支架,支架的顶端固定连接有垂直调节气缸,垂直调节气缸的伸缩端上固定连接有电动导轨,电动导轨上滑动连接有打磨装置,打磨装置上连接有图像采集装置

基于机器视觉的焊缝识别及轨迹规划的任务书.docx
基于机器视觉的焊缝识别及轨迹规划的任务书任务名称:基于机器视觉的焊缝识别及轨迹规划任务类型:研究型任务任务目的:焊接是制造业中常见的生产工艺。在焊接过程中,焊缝的质量和位置对焊接质量有着决定性的影响。传统的焊接方式通常需要人工对焊缝进行认知和判断,效率低下且存在误判的风险。因此,基于机器视觉的焊缝识别和轨迹规划技术能够提高焊接质量和生产效率,具有重要的应用价值。本研究的目的即为探究机器视觉技术在焊接过程中的应用,实现对焊缝的自动识别和轨迹规划。任务内容:1.焊缝图像采集与预处理。采集焊缝图像,利用数字图像

基于双目视觉的机器人焊缝轨迹检测的研究.docx
基于双目视觉的机器人焊缝轨迹检测的研究基于双目视觉的机器人焊缝轨迹检测的研究摘要:随着机器人技术的发展,机器人焊接在工业生产中发挥着重要作用。然而,机器人焊缝轨迹检测在焊接过程中面临着诸多困难。本文基于双目视觉,在机器人焊接中实现焊缝轨迹的精确检测。首先,介绍了焊接中的问题和挑战。然后,详细阐述了双目视觉技术在焊缝轨迹检测中的应用。最后,通过实验证明了双目视觉在机器人焊接中的有效性和可行性。1.研究背景机器人焊接已成为现代制造业中不可或缺的一部分。然而,在焊接过程中,由于焊接过程中的扭曲、变形和误差等因素