
一种仿尺蠖式输电线路巡检机器人越障运动分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种仿尺蠖式输电线路巡检机器人越障运动分析.docx
一种仿尺蠖式输电线路巡检机器人越障运动分析一种仿尺蠖式输电线路巡检机器人越障运动分析摘要:随着电力行业的快速发展,输电线路的巡检工作变得越来越重要。为了提高巡检效率和减少人力成本,机器人技术被广泛应用于输电线路巡检。本文提出了一种基于仿尺蠖式的输电线路巡检机器人,通过对机器人的越障运动进行分析,优化机器人的设计和控制算法,以实现高效而安全的输电线路巡检。1.引言输电线路巡检是确保电网正常运行的一项重要工作。传统的输电线路巡检依赖于人工操作,存在巡检效率低、安全风险高等问题。而机器人技术的应用可以提高巡检效
一种架空输电线路巡检机器人越障装置及越障方法.pdf
本发明涉及一种架空输电线路巡检机器人越障装置及越障方法,其中越障装置包括巡检机器人机体、摆动机架、复位装置和驱动臂,所述摆动支架为两个,分别安装在巡检机器人机体两端,摆动支架可绕巡检机器人机体轴线运动,每个所述摆动机架的不同侧错位安装复位装置,每个复位装置连接有驱动臂,驱动臂可相对摆动机架转动。本发明的越障装置在越障过程中行走轮无需通过脱线实现跨越障碍物,可直接从障碍物上面或侧面越过,避免脱线而导致越障失败,巡检效率高,机器人运行平稳且可靠性高。
一种高压输电线路越障巡检车.pdf
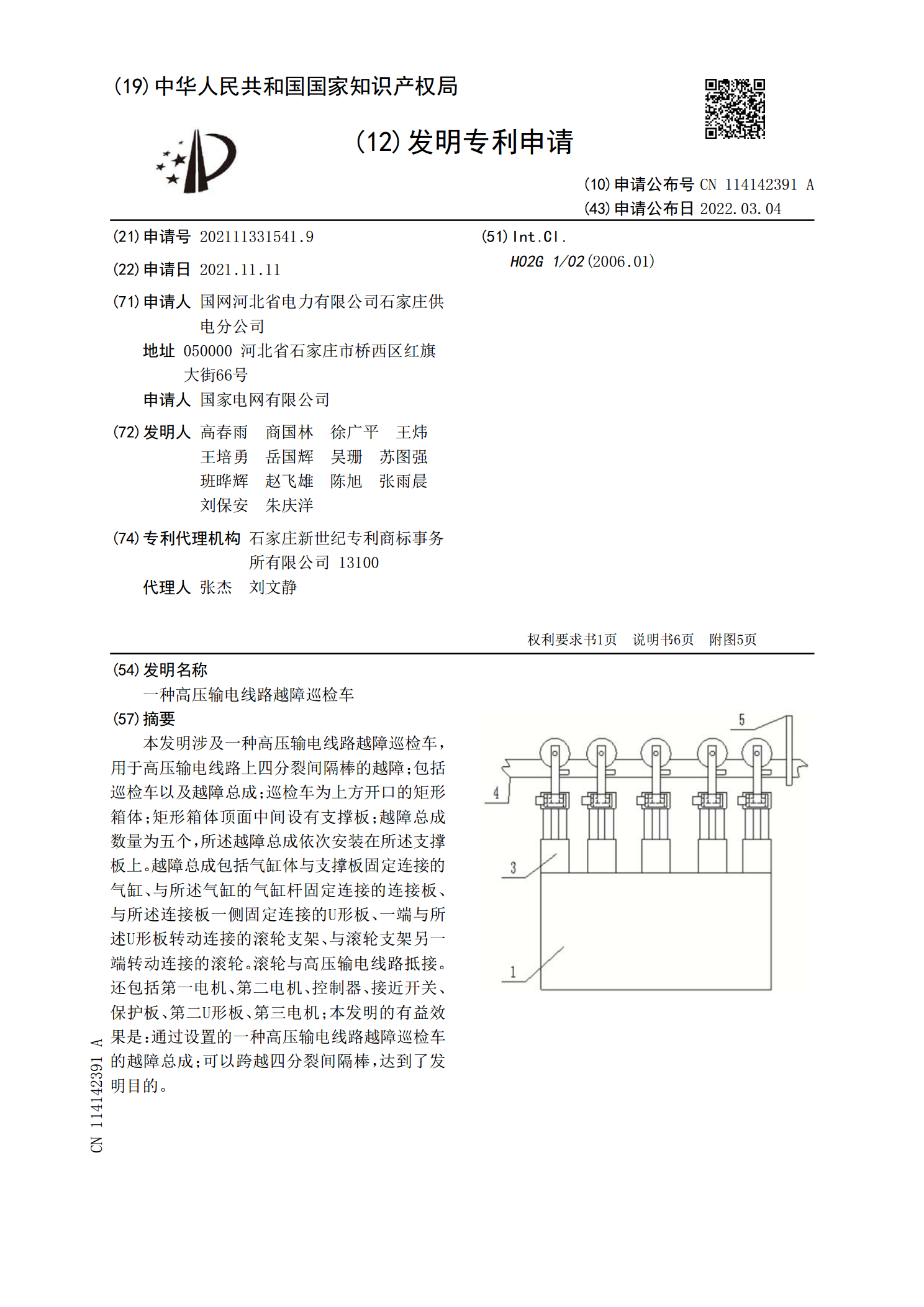
本发明涉及一种高压输电线路越障巡检车,用于高压输电线路上四分裂间隔棒的越障;包括巡检车以及越障总成;巡检车为上方开口的矩形箱体;矩形箱体顶面中间设有支撑板;越障总成数量为五个,所述越障总成依次安装在所述支撑板上。越障总成包括气缸体与支撑板固定连接的气缸、与所述气缸的气缸杆固定连接的连接板、与所述连接板一侧固定连接的U形板、一端与所述U形板转动连接的滚轮支架、与滚轮支架另一端转动连接的滚轮。滚轮与高压输电线路抵接。还包括第一电机、第二电机、控制器、接近开关、保护板、第二U形板、第三电机;本发明的有益效果是:
一种架空输电线路轮式巡检机器人用杆塔越障桥.pdf
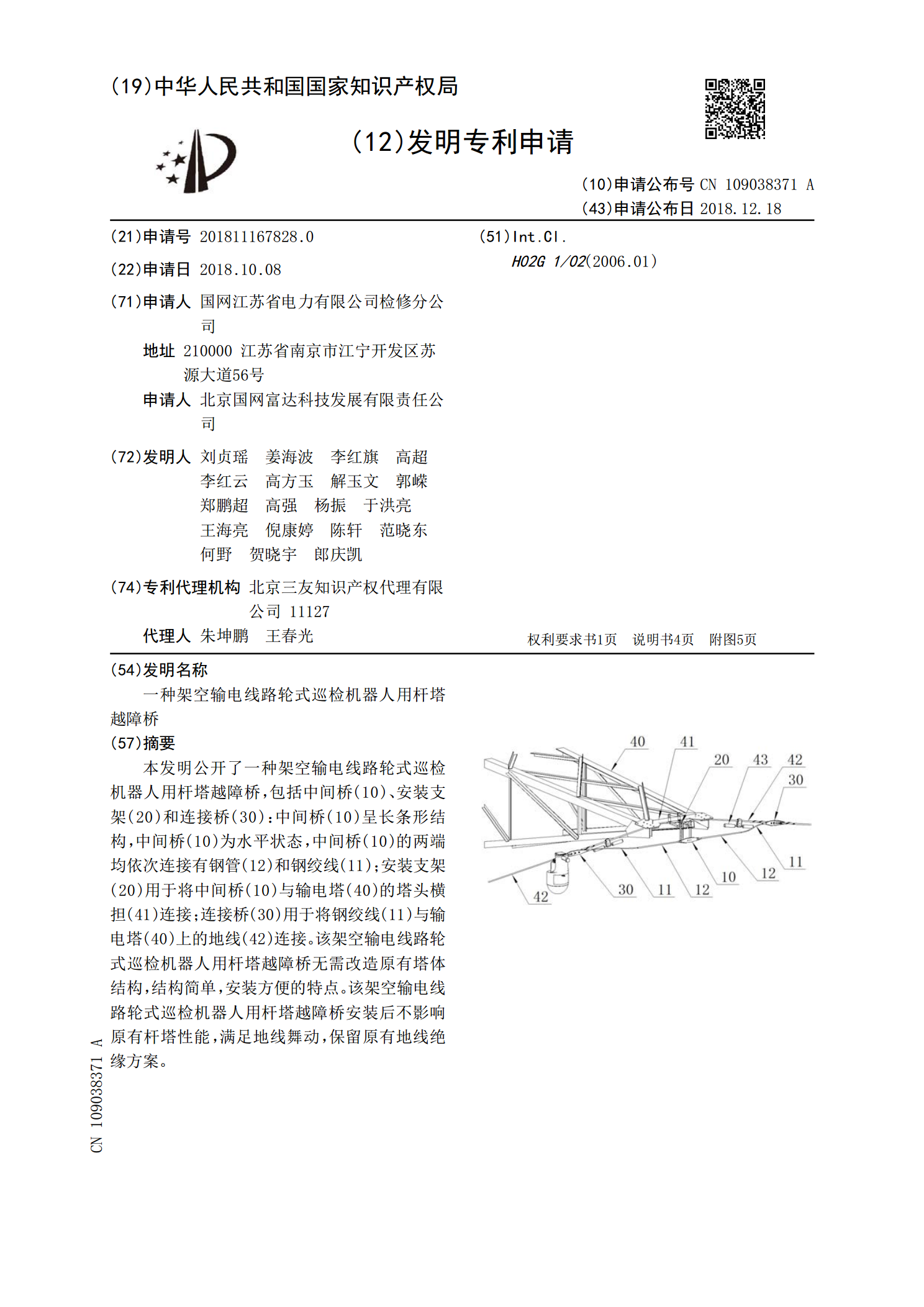
本发明公开了一种架空输电线路轮式巡检机器人用杆塔越障桥,包括中间桥(10)、安装支架(20)和连接桥(30):中间桥(10)呈长条形结构,中间桥(10)为水平状态,中间桥(10)的两端均依次连接有钢管(12)和钢绞线(11);安装支架(20)用于将中间桥(10)与输电塔(40)的塔头横担(41)连接;连接桥(30)用于将钢绞线(11)与输电塔(40)上的地线(42)连接。该架空输电线路轮式巡检机器人用杆塔越障桥无需改造原有塔体结构,结构简单,安装方便的特点。该架空输电线路轮式巡检机器人用杆塔越障桥安装后不
一种双输电线巡检越障机器人.pdf
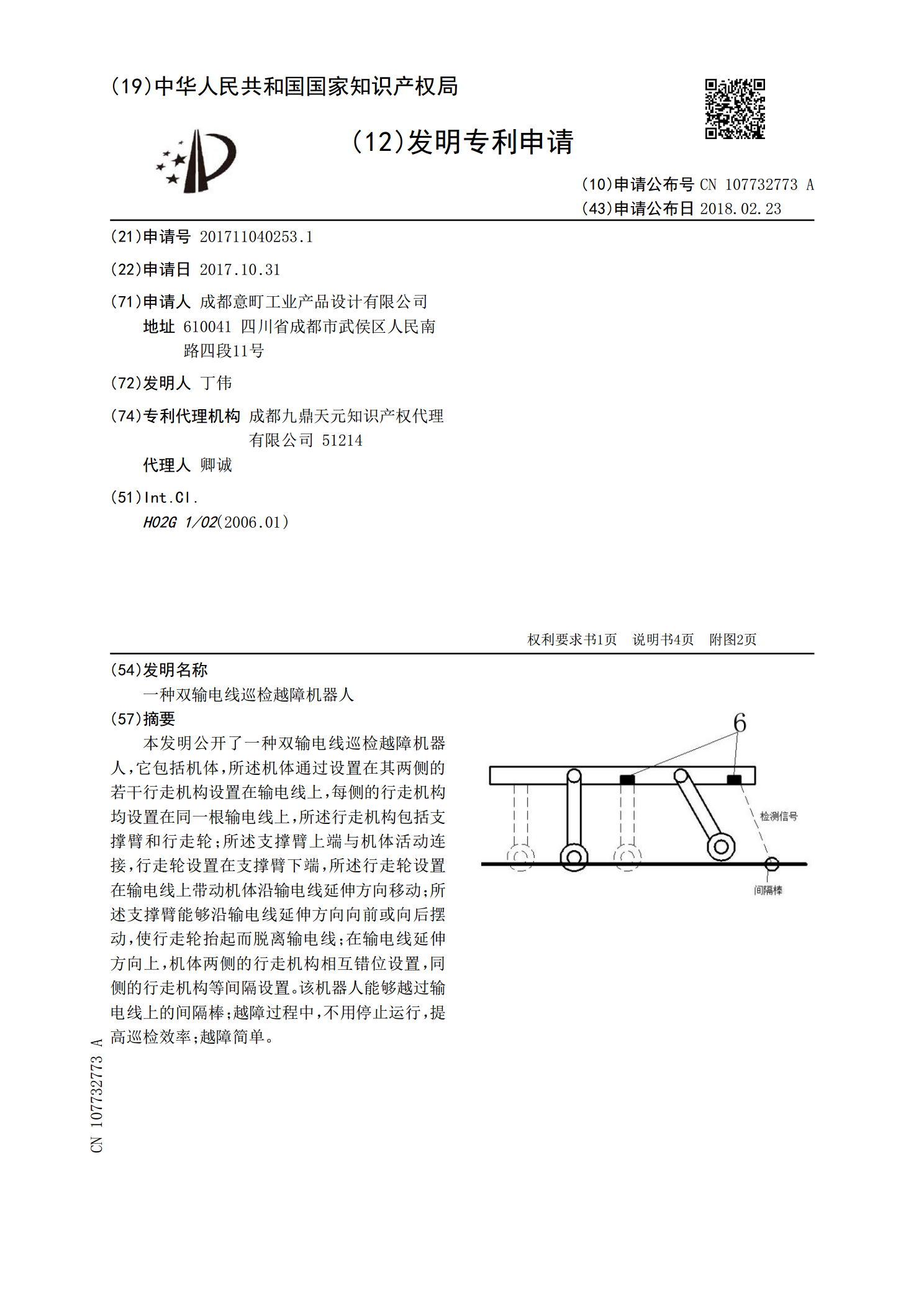
本发明公开了一种双输电线巡检越障机器人,它包括机体,所述机体通过设置在其两侧的若干行走机构设置在输电线上,每侧的行走机构均设置在同一根输电线上,所述行走机构包括支撑臂和行走轮;所述支撑臂上端与机体活动连接,行走轮设置在支撑臂下端,所述行走轮设置在输电线上带动机体沿输电线延伸方向移动;所述支撑臂能够沿输电线延伸方向向前或向后摆动,使行走轮抬起而脱离输电线;在输电线延伸方向上,机体两侧的行走机构相互错位设置,同侧的行走机构等间隔设置。该机器人能够越过输电线上的间隔棒;越障过程中,不用停止运行,提高巡检效率;越