
一种全景相机系统的标定方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种全景相机系统的标定方法研究.docx
一种全景相机系统的标定方法研究一种全景相机系统的标定方法研究摘要:全景相机系统已经在许多领域得到广泛应用,例如虚拟现实、无人机航拍和安防监控等。为了提高全景相机的图像质量和准确度,需要对全景相机系统进行精确的标定。本论文研究了一种全景相机系统的标定方法,该方法能够准确地估计相机的内外参数,并且可以适用于各种不同的全景相机系统。实验结果表明,该方法能够有效地提高全景相机系统的图像质量和准确度。关键词:全景相机,标定方法,内外参数,图像质量,准确度1.引言全景相机系统是一种能够拍摄全景图像的相机系统,它能够捕

深空探测全景相机几何标定方法的研究.docx
深空探测全景相机几何标定方法的研究深空探测全景相机是一种用于拍摄太空中物体的高精度相机。这种相机在太阳系探测、星际探测和天文学研究中都有广泛的应用。然而,由于在太空中环境复杂,全景相机本身的精度也受到挑战。因此,标定全景相机的几何参数,如内参和外参,是确保太空探测任务成功的一个重要环节。本文将介绍几种全景相机几何标定方法以及它们的优缺点。首先,我们需要了解全景相机的内外参。内参包括相机的焦距、像点偏移、像素尺寸和畸变校正参数等。外参包括相机的位置和朝向。这些参数可以决定相机能够拍摄的视野和成像的精度。因此
一种全景红外相机几何标定方法.pdf
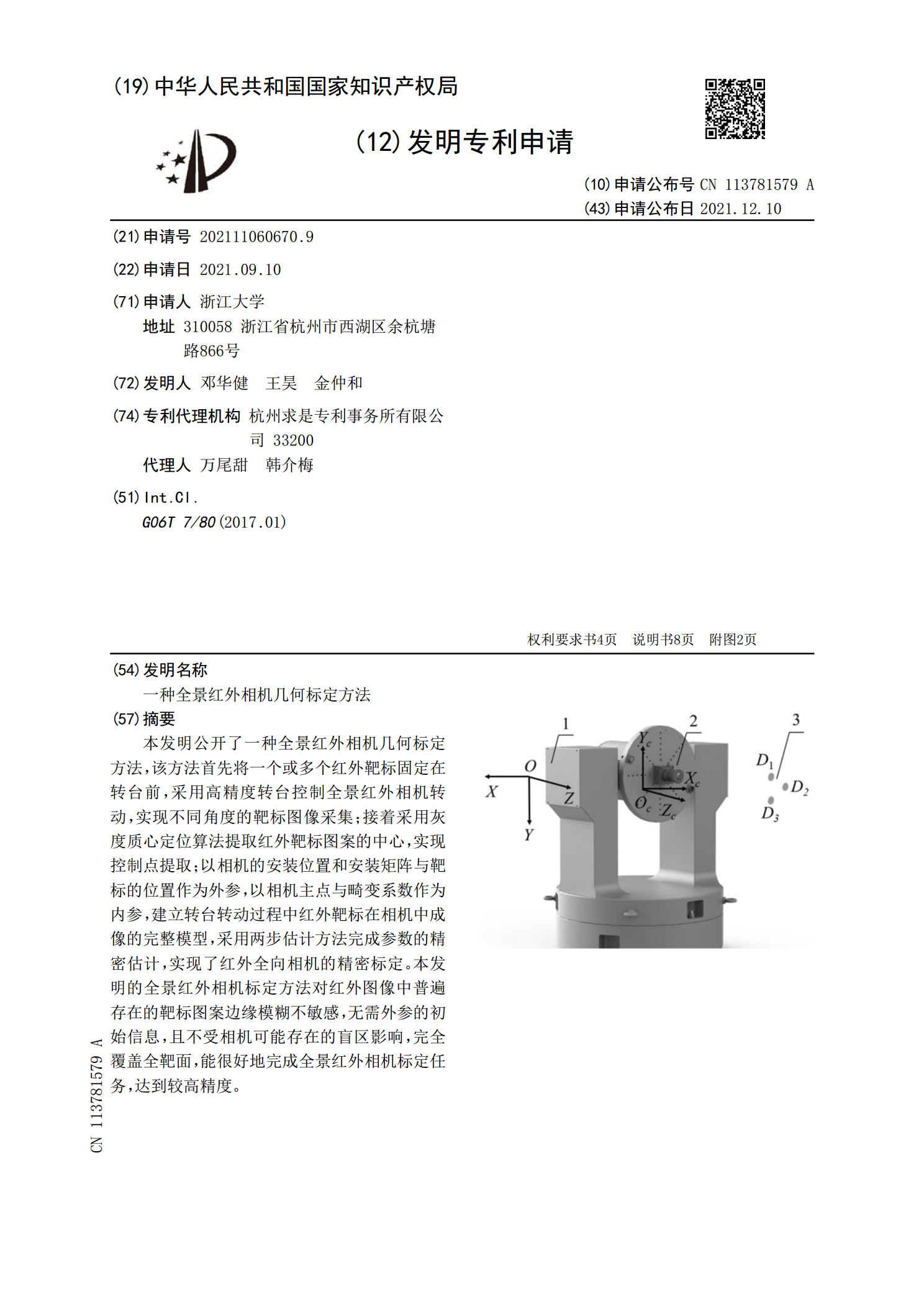
本发明公开了一种全景红外相机几何标定方法,该方法首先将一个或多个红外靶标固定在转台前,采用高精度转台控制全景红外相机转动,实现不同角度的靶标图像采集;接着采用灰度质心定位算法提取红外靶标图案的中心,实现控制点提取;以相机的安装位置和安装矩阵与靶标的位置作为外参,以相机主点与畸变系数作为内参,建立转台转动过程中红外靶标在相机中成像的完整模型,采用两步估计方法完成参数的精密估计,实现了红外全向相机的精密标定。本发明的全景红外相机标定方法对红外图像中普遍存在的靶标图案边缘模糊不敏感,无需外参的初始信息,且不受相

深空探测全景相机几何标定方法的研究的中期报告.docx
深空探测全景相机几何标定方法的研究的中期报告一、研究背景深空探测任务需要获取目标星球表面的全景图像数据,实现数据的准确拼接和精准定位,则需要全景相机,而全景相机在使用过程中需要进行标定,以保证图像质量和定位精度。因此,本研究聚焦于深空探测全景相机几何标定方法的研究。二、研究内容本研究主要关注深空探测全景相机的外部几何标定,研究内容包括:1.建立全景相机的简化模型,并对其相机内外参数进行分析。2.提出采集标定数据的方法,包括标定板、标定角点提取和图像采集。3.对采集到的标定数据进行处理和校正,提取有效特征点

深空探测全景相机几何标定方法的研究的任务书.docx
深空探测全景相机几何标定方法的研究的任务书任务书一、研究背景与意义随着人类对宇宙的探索,先后发射了一系列的探测器到太空中进行深空的探测。其中,在探索图像领域上所用到的全景相机在深空探测中具有着极为重要的地位。全景相机不仅可以捕捉到太阳系以及其他星系中的星体、行星、卫星等天体的图像,而且还可以测量和分析图像中的物理性质和化学性质等信息。因此,全景相机不仅可以协助天文学家进行有关宇宙的理论研究,同时它也是宇宙探测的重要工具之一。然而,在进行相机成像过程中,由于光学系统等因素的存在,全景相机所得到的图像往往会出