
二维标定板、三维标定体、相机系统及相机标定方法、标定支撑架.pdf

依波****bc

1/9

2/9
3/9
4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
二维标定板、三维标定体、相机系统及相机标定方法、标定支撑架.pdf
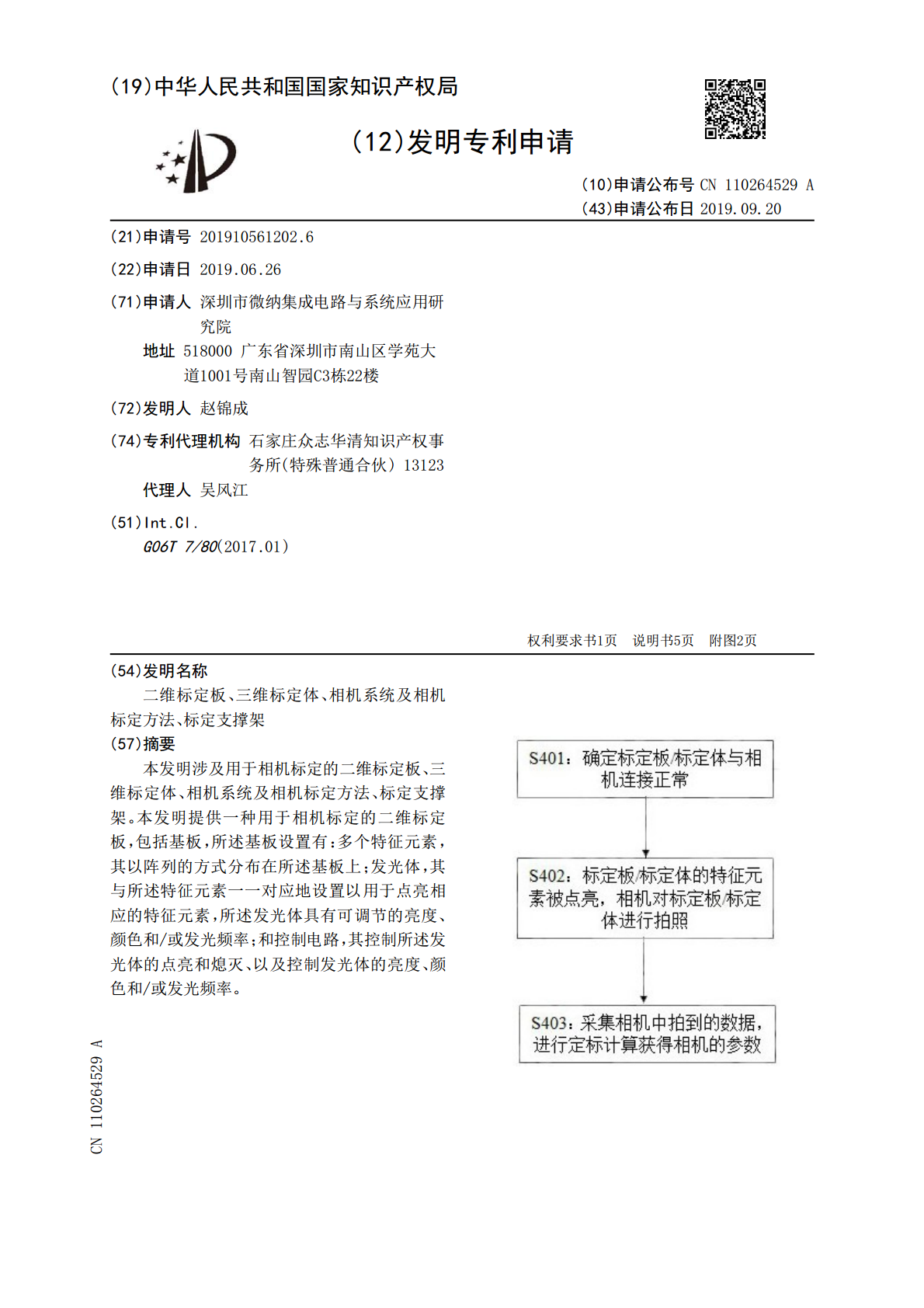
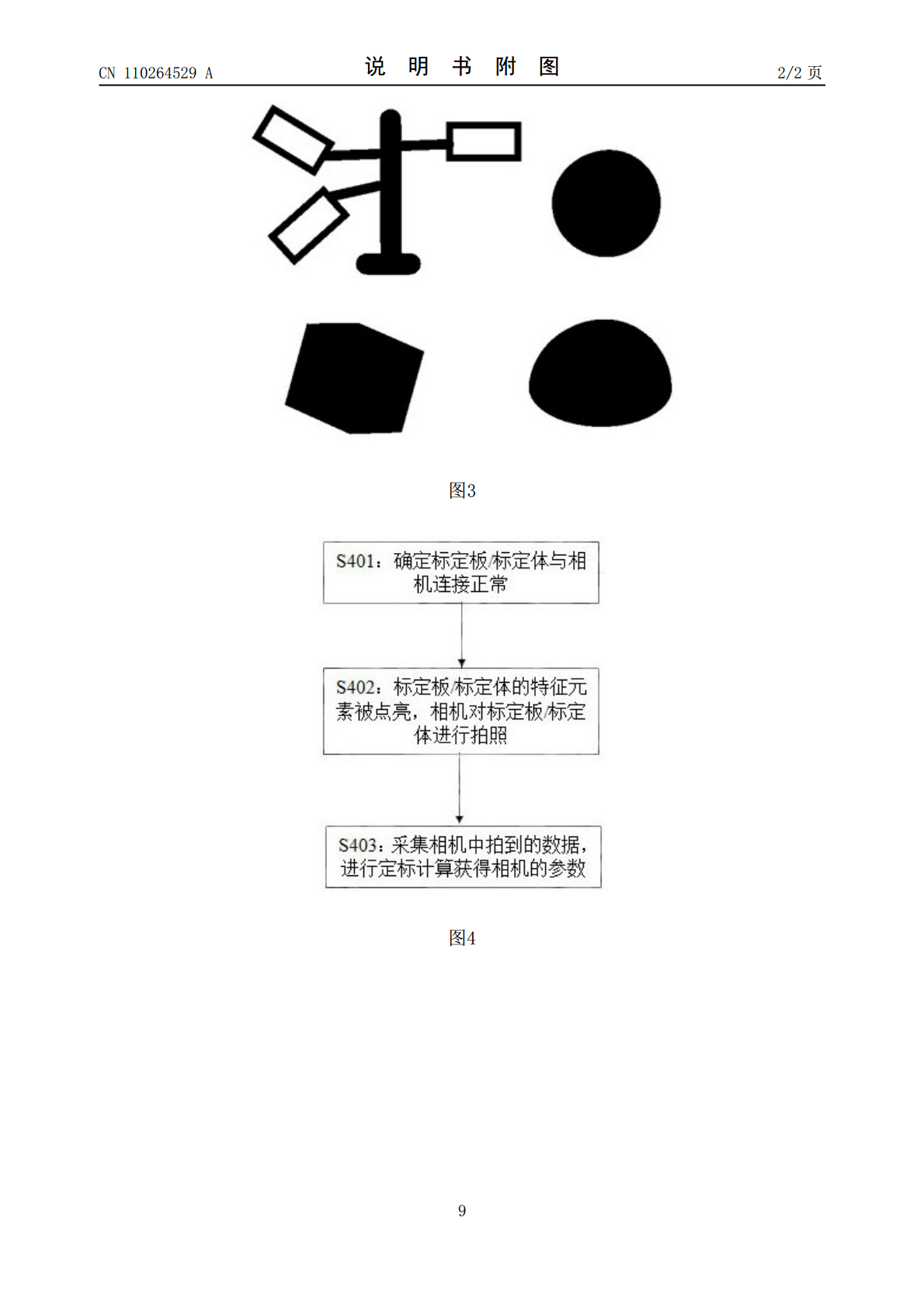
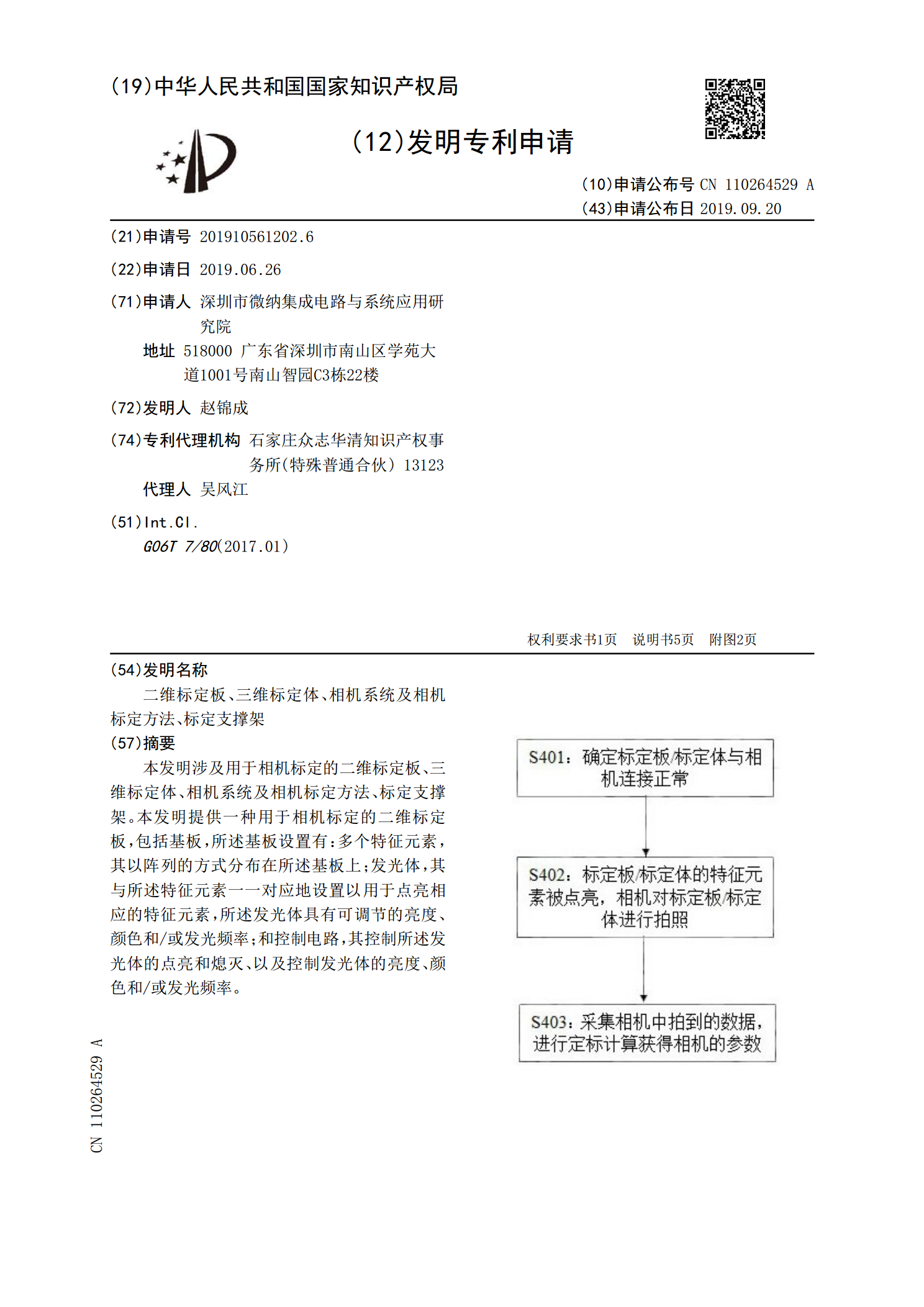
本发明涉及用于相机标定的二维标定板、三维标定体、相机系统及相机标定方法、标定支撑架。本发明提供一种用于相机标定的二维标定板,包括基板,所述基板设置有:多个特征元素,其以阵列的方式分布在所述基板上;发光体,其与所述特征元素一一对应地设置以用于点亮相应的特征元素,所述发光体具有可调节的亮度、颜色和/或发光频率;和控制电路,其控制所述发光体的点亮和熄灭、以及控制发光体的亮度、颜色和/或发光频率。
相机标定板及其使用方法、相机标定的特征点提取方法.pdf
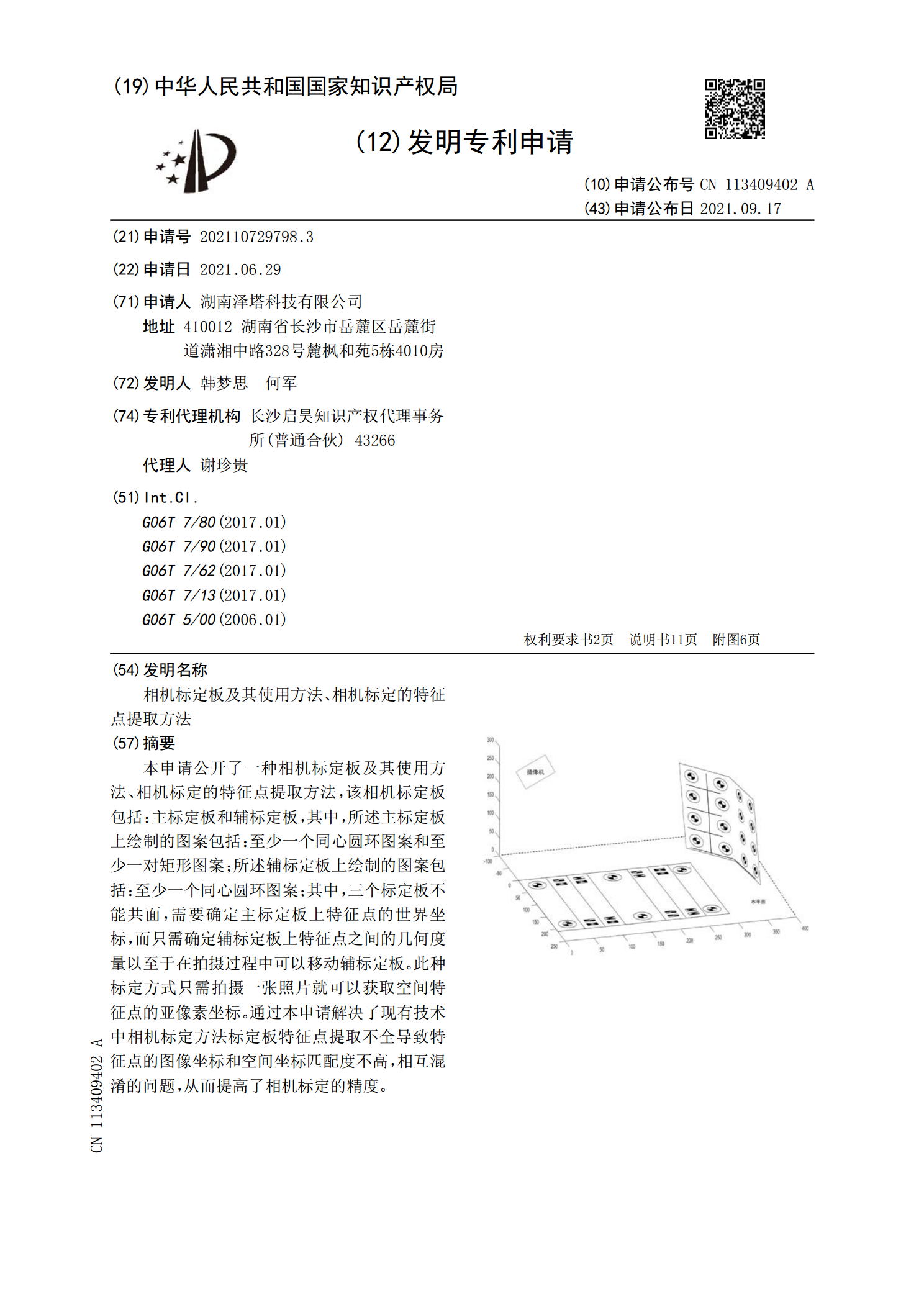
本申请公开了一种相机标定板及其使用方法、相机标定的特征点提取方法,该相机标定板包括:主标定板和辅标定板,其中,所述主标定板上绘制的图案包括:至少一个同心圆环图案和至少一对矩形图案;所述辅标定板上绘制的图案包括:至少一个同心圆环图案;其中,三个标定板不能共面,需要确定主标定板上特征点的世界坐标,而只需确定辅标定板上特征点之间的几何度量以至于在拍摄过程中可以移动辅标定板。此种标定方式只需拍摄一张照片就可以获取空间特征点的亚像素坐标。通过本申请解决了现有技术中相机标定方法标定板特征点提取不全导致特征点的图像坐标
一种TOF相机的标定装置、标定设备和标定方法.pdf
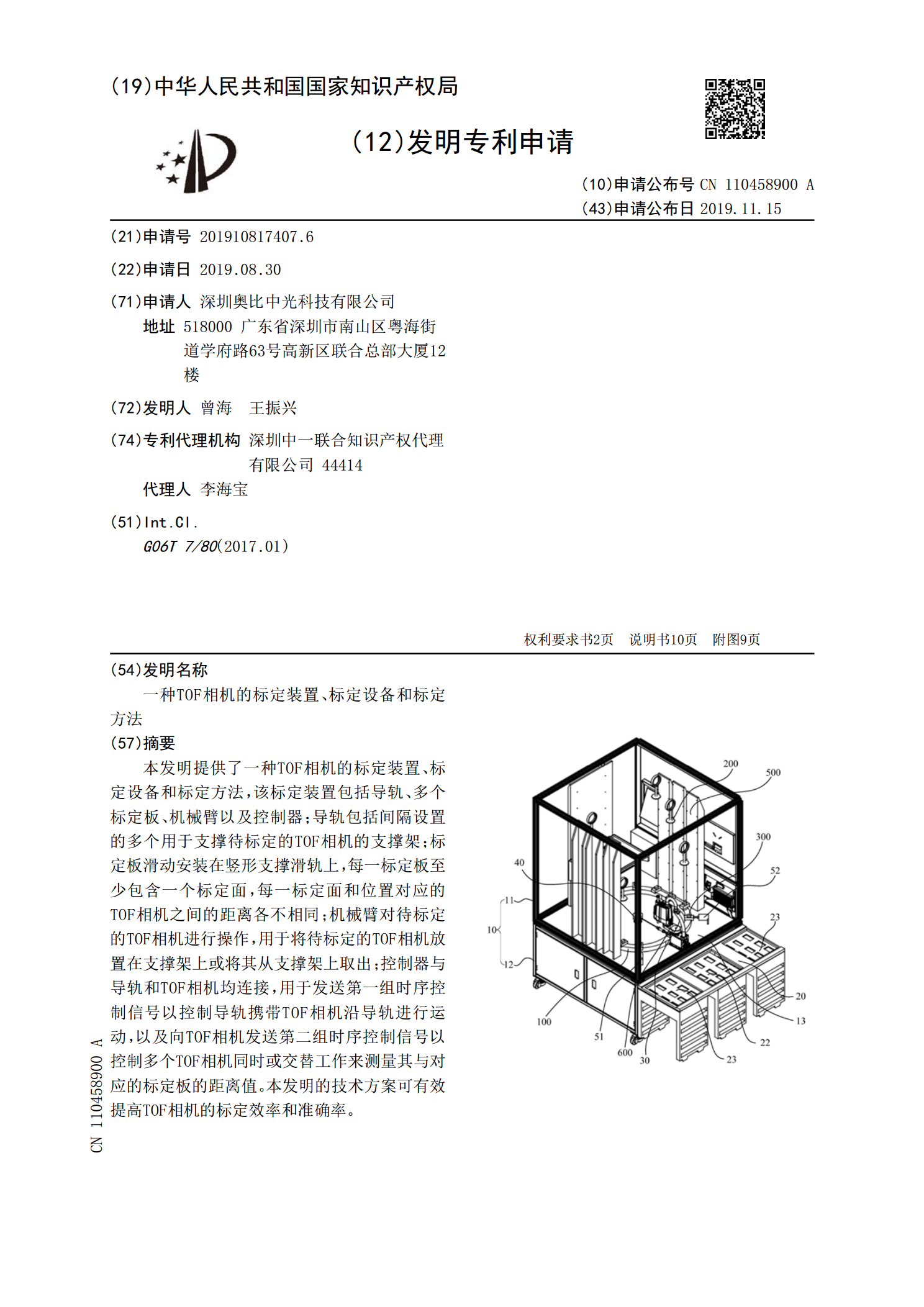
本发明提供了一种TOF相机的标定装置、标定设备和标定方法,该标定装置包括导轨、多个标定板、机械臂以及控制器;导轨包括间隔设置的多个用于支撑待标定的TOF相机的支撑架;标定板滑动安装在竖形支撑滑轨上,每一标定板至少包含一个标定面,每一标定面和位置对应的TOF相机之间的距离各不相同;机械臂对待标定的TOF相机进行操作,用于将待标定的TOF相机放置在支撑架上或将其从支撑架上取出;控制器与导轨和TOF相机均连接,用于发送第一组时序控制信号以控制导轨携带TOF相机沿导轨进行运动,以及向TOF相机发送第二组时序控制信

基于圆形标定板的激光雷达与相机联合标定方法和装置.pdf
本申请公开了基于圆形标定板的激光雷达与相机联合标定方法、装置及存储介质,方法包括:通过激光雷达和相机对圆形标定板进行数据采集,分别获得激光雷达的点云数据和相机数据;对相机数据进行处理,得到特征点在相机坐标系中的位置信息;对点云数据进行处理,通过特征点得到圆形标定板的圆面所在平面的空间方程以及拟合过圆心的垂线方程,并联立垂线方程与平面的空间方程求解,得到激光雷达坐标系中的位置信息;将相机坐标系中的位置信息与激光雷达坐标系中的位置信息作对比,保留符合圆形标定板的半径要求的特征点,从而完成标定。本申请可以有效的

相机标定板、标定数据采集方法、畸变校正方法及装置.pdf
本发明涉及提供了一种相机标定板、标定数据采集方法、畸变校正方法及装置,涉及机器视觉技术领域,包括:采用本文的相机标定数据采集方法来采集棋盘格图像,获取所述棋盘格图像内的所有图像角点的序号及其对应的三维坐标;在所述棋盘格图像中心选取多个角点,并确定所述多个角点对应的所述三维坐标;对所述初始畸变参数进行优化得到优化畸变参数,并根据计算出的所述优化畸变参数进行畸变矫正。本发明只需采集一幅棋盘格图像,通过特殊固定角点完成采集图像角点和三维坐标的一一对应。并获取理想图像角点来计算相机的初始畸变参数,通过优化后得到准