
基于液压驱动的拟人机器人上肢机构设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于液压驱动的拟人机器人上肢机构设计.docx
基于液压驱动的拟人机器人上肢机构设计随着科技的不断发展,人类已经能够构建出很多种类型的机器人,而拟人机器人就是其中的一种。它们模拟人类运动和思维,可以辅助人类完成一些重复性或复杂的工作。而其中的上肢机构,是连接“大脑”和物品,完成拿取、抓取等功能的重要部分。本文就基于液压驱动的拟人机器人上肢机构进行探讨。一、液压驱动的优越性拟人机器人上肢的推动强度很大,而传统的电气驱动方式并不能承受如此巨大的力。而液压驱动方式,可以提供很高的力矩和扭矩,可以满足这种需求。同时,液压驱动还可以实现运动的平滑过渡,避免了电气
一种基于液压驱动的机器人弹跳机构.pdf
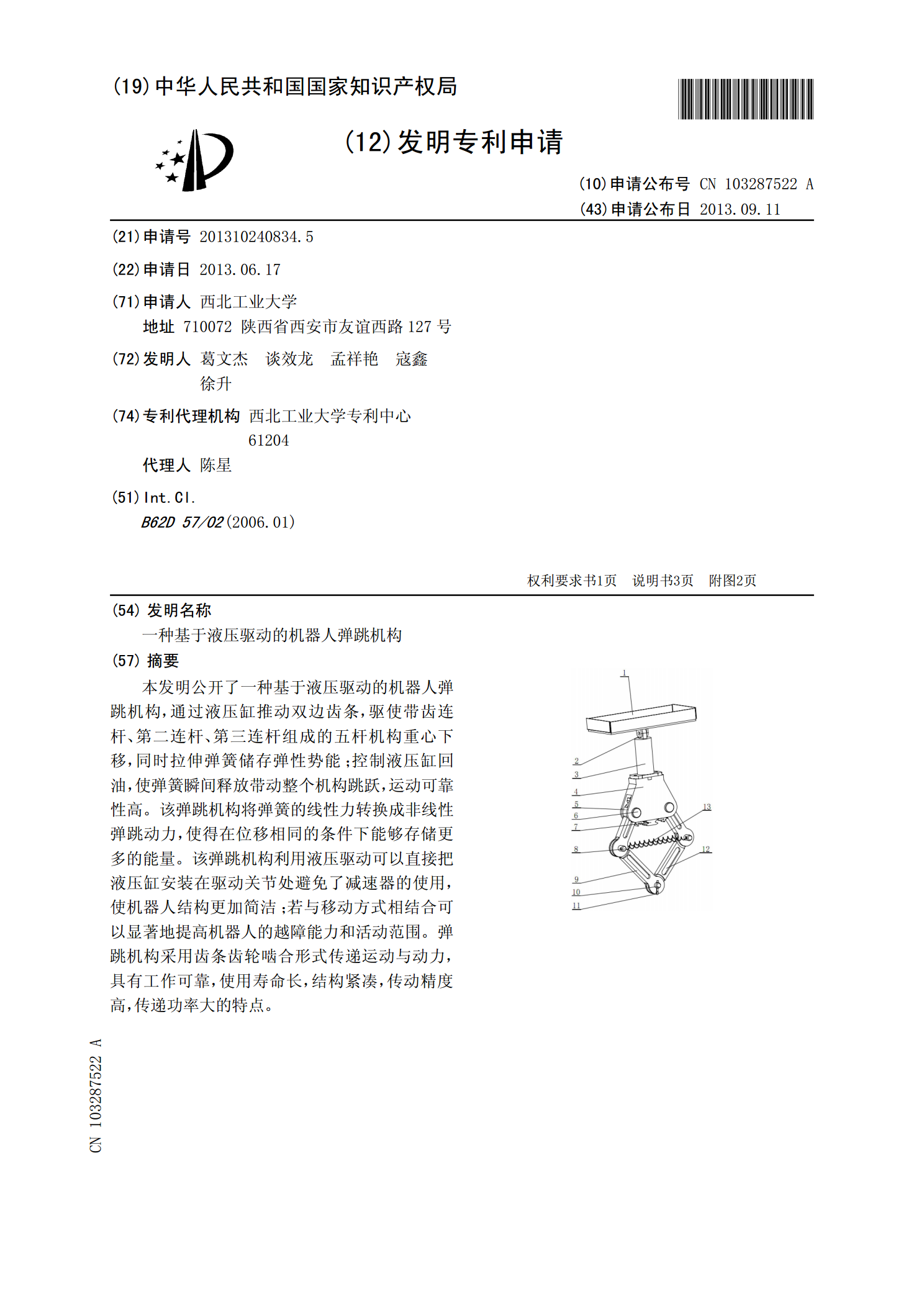
本发明公开了一种基于液压驱动的机器人弹跳机构,通过液压缸推动双边齿条,驱使带齿连杆、第二连杆、第三连杆组成的五杆机构重心下移,同时拉伸弹簧储存弹性势能;控制液压缸回油,使弹簧瞬间释放带动整个机构跳跃,运动可靠性高。该弹跳机构将弹簧的线性力转换成非线性弹跳动力,使得在位移相同的条件下能够存储更多的能量。该弹跳机构利用液压驱动可以直接把液压缸安装在驱动关节处避免了减速器的使用,使机器人结构更加简洁;若与移动方式相结合可以显著地提高机器人的越障能力和活动范围。弹跳机构采用齿条齿轮啮合形式传递运动与动力,具有工作

基于液压驱动的四足步行机器人设计与仿真.docx
基于液压驱动的四足步行机器人设计与仿真摘要:本文基于液压驱动的四足步行机器人进行了设计与仿真研究。首先,介绍了机器人的结构和工作原理;然后,详细讨论了液压系统的设计和参数选择,并进行了相关传感器的选取与配置;接着,使用SolidWorks软件建模,并利用ADAMS软件进行运动仿真;最后,通过仿真实验验证了机器人的步态性能和稳定性,并进行了分析和讨论。研究结果表明,基于液压驱动的四足步行机器人具有良好的运动性能和稳定性,可以用于各种复杂环境下的任务执行。关键词:液压驱动;四足步行机器人;设计;仿真;步态性能
一种基于绳索驱动的上肢康复机器人.pdf
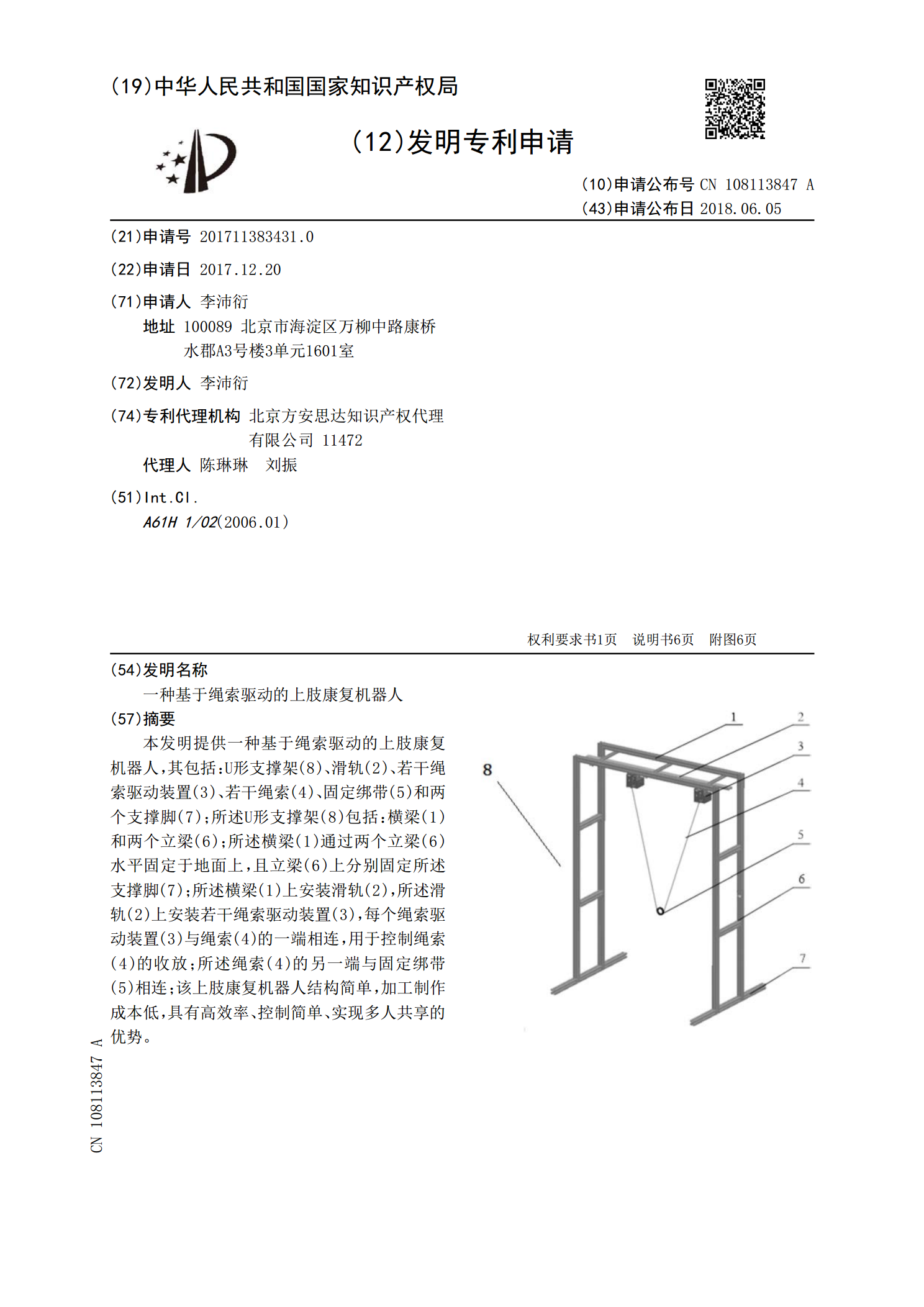
本发明提供一种基于绳索驱动的上肢康复机器人,其包括:U形支撑架(8)、滑轨(2)、若干绳索驱动装置(3)、若干绳索(4)、固定绑带(5)和两个支撑脚(7);所述U形支撑架(8)包括:横梁(1)和两个立梁(6);所述横梁(1)通过两个立梁(6)水平固定于地面上,且立梁(6)上分别固定所述支撑脚(7);所述横梁(1)上安装滑轨(2),所述滑轨(2)上安装若干绳索驱动装置(3),每个绳索驱动装置(3)与绳索(4)的一端相连,用于控制绳索(4)的收放;所述绳索(4)的另一端与固定绑带(5)相连;该上肢康复机器人结

基于并联机构的双重驱动管道机器人设计与研究.pptx
添加副标题目录PART01PART02并联机构的基本概念双重驱动管道机器人的定义与功能并联机构在双重驱动管道机器人中的应用PART03机器人结构设计驱动系统设计控制算法设计实验验证与性能评估PART04优化目标与约束条件优化方法与实现过程实验结果与分析PART05常见问题与挑战解决方案与实践经验未来研究方向与展望PART06研究成果总结对未来研究的建议与展望感谢您的观看