
一种基于液压驱动的机器人弹跳机构.pdf

Ma****57


1/7
2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于液压驱动的机器人弹跳机构.pdf
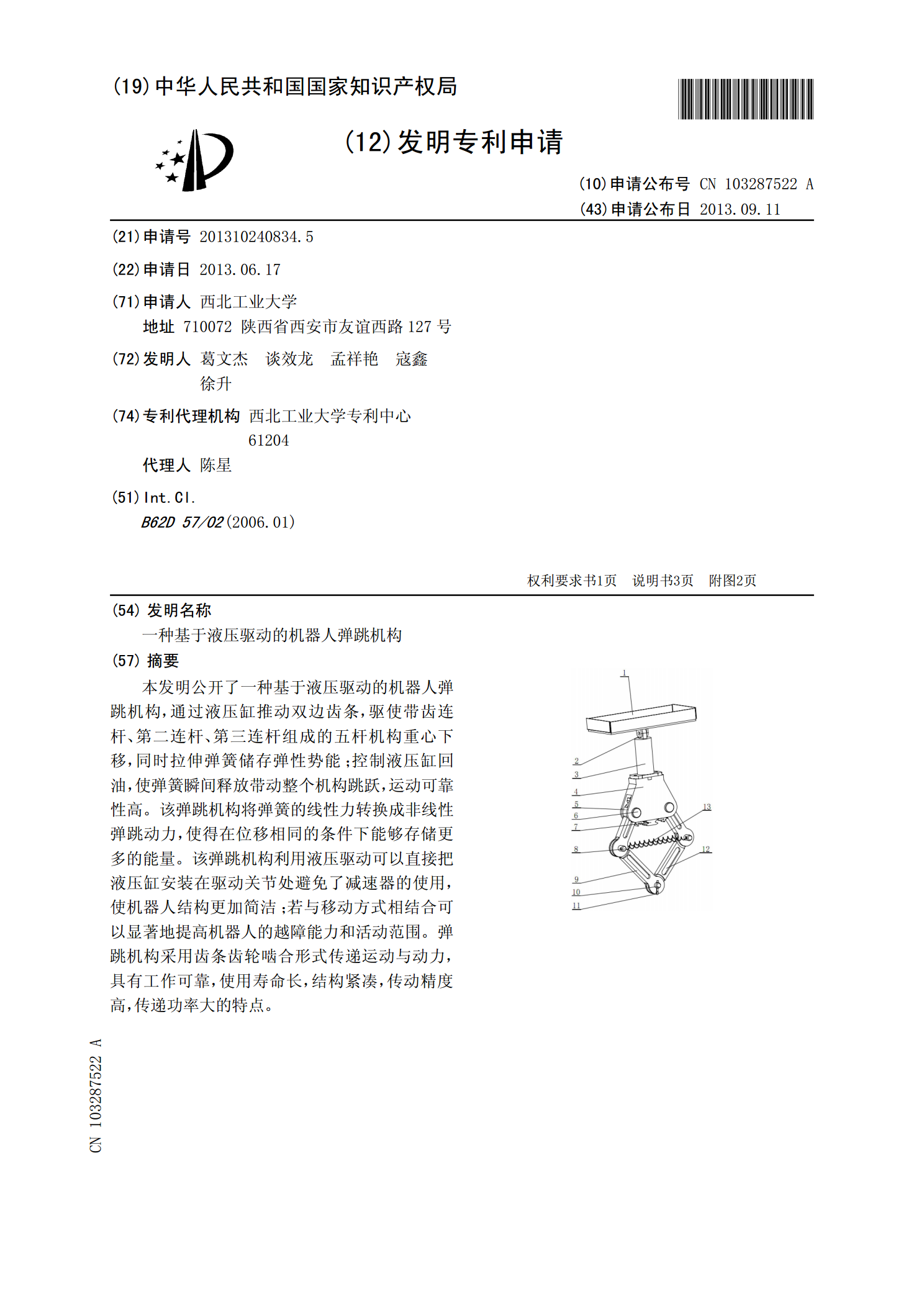
本发明公开了一种基于液压驱动的机器人弹跳机构,通过液压缸推动双边齿条,驱使带齿连杆、第二连杆、第三连杆组成的五杆机构重心下移,同时拉伸弹簧储存弹性势能;控制液压缸回油,使弹簧瞬间释放带动整个机构跳跃,运动可靠性高。该弹跳机构将弹簧的线性力转换成非线性弹跳动力,使得在位移相同的条件下能够存储更多的能量。该弹跳机构利用液压驱动可以直接把液压缸安装在驱动关节处避免了减速器的使用,使机器人结构更加简洁;若与移动方式相结合可以显著地提高机器人的越障能力和活动范围。弹跳机构采用齿条齿轮啮合形式传递运动与动力,具有工作
基于电机驱动的机器人垂直弹跳机构.pdf
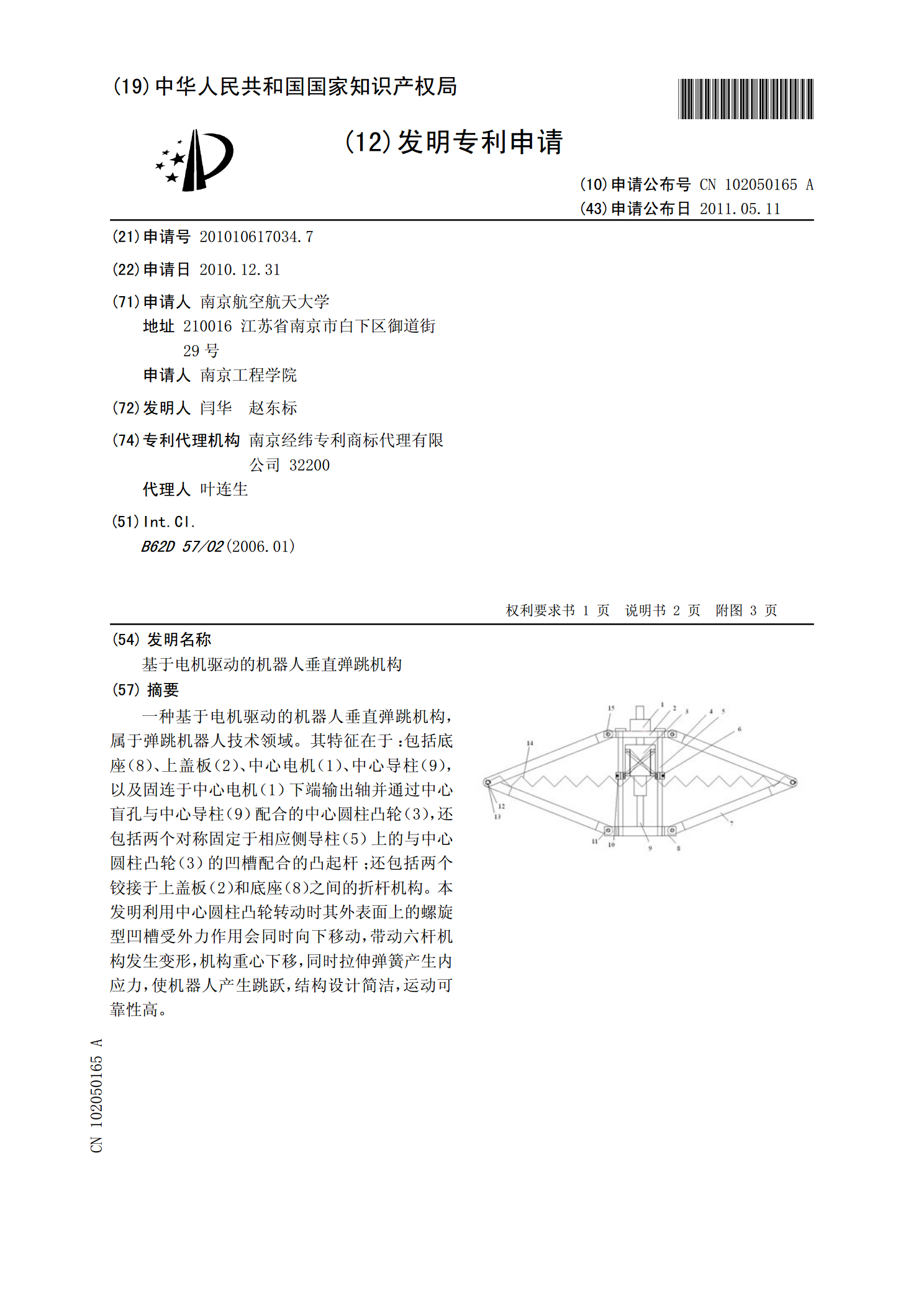
一种基于电机驱动的机器人垂直弹跳机构,属于弹跳机器人技术领域。其特征在于:包括底座(8)、上盖板(2)、中心电机(1)、中心导柱(9),以及固连于中心电机(1)下端输出轴并通过中心盲孔与中心导柱(9)配合的中心圆柱凸轮(3),还包括两个对称固定于相应侧导柱(5)上的与中心圆柱凸轮(3)的凹槽配合的凸起杆;还包括两个铰接于上盖板(2)和底座(8)之间的折杆机构。本发明利用中心圆柱凸轮转动时其外表面上的螺旋型凹槽受外力作用会同时向下移动,带动六杆机构发生变形,机构重心下移,同时拉伸弹簧产生内应力,使机器人产生

基于介电型EAP驱动的机器人垂直弹跳机构.pdf
一种基于介电型EAP驱动的机器人垂直弹跳机构,属于弹跳机器人技术领域。包括底座(13)、上盖板(1)、EAP驱动器组件、中心导柱(14),中心圆柱凸轮(24),中心圆柱凸轮(24)上具有棘轮结构和凹槽结构。棘轮结构与EAP驱动器组件中的棘爪配合。还包括两个对称固定于相应侧导柱(15)上的与中心圆柱凸轮(24)的凹槽配合的凸起杆;还包括两个铰接于上盖板(1)和底座(13)之间的折杆机构。本发明利用介电型EAP驱动器通过棘爪棘轮机构带动中心圆柱凸轮单向旋转,中心圆柱凸轮转动时其外表面上的螺旋型凹槽受外力作用会

一种基于液压驱动的船舵机构.pdf
本发明公开了一种基于液压驱动的船舵机构,包括舵叶、舵杆、限位板、转动杆、环形套、舵杆驱动装置和转动杆驱动装置。舵叶的后部设有多个通孔。舵杆的下端与舵叶的前部固定相连。环形套同时套设于舵叶和转动杆外侧,且由舵叶和转动杆张紧。环形套上具有水平设置的多个条形孔。舵杆驱动装置与舵杆传动相连,用于驱动舵杆旋转。转动杆驱动装置与转动杆传动相连。相比于现有技术,本发明的基于液压驱动的船舵机构既能够提高船只转舵时的效率,又不影响船只沿直线行进的速度。

基于液压驱动的拟人机器人上肢机构设计.docx
基于液压驱动的拟人机器人上肢机构设计随着科技的不断发展,人类已经能够构建出很多种类型的机器人,而拟人机器人就是其中的一种。它们模拟人类运动和思维,可以辅助人类完成一些重复性或复杂的工作。而其中的上肢机构,是连接“大脑”和物品,完成拿取、抓取等功能的重要部分。本文就基于液压驱动的拟人机器人上肢机构进行探讨。一、液压驱动的优越性拟人机器人上肢的推动强度很大,而传统的电气驱动方式并不能承受如此巨大的力。而液压驱动方式,可以提供很高的力矩和扭矩,可以满足这种需求。同时,液压驱动还可以实现运动的平滑过渡,避免了电气