
履带式爬壁机器人磁吸附单元优化设计与实验研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

履带式爬壁机器人磁吸附单元优化设计与实验研究.docx
履带式爬壁机器人磁吸附单元优化设计与实验研究履带式爬壁机器人磁吸附单元优化设计与实验研究摘要:随着现代科技的快速发展,机器人技术在许多领域发挥着重要作用。履带式爬壁机器人作为一种特殊类型的机器人,具有较大的市场潜力和广泛的应用前景。然而,目前履带式爬壁机器人在垂直爬升过程中存在着一些问题,例如对于平滑表面的附着性能不佳,容易掉落。为了解决这些问题,本研究对履带式爬壁机器人的磁吸附单元进行了优化设计并进行了实验研究。关键词:履带式爬壁机器人;磁吸附;优化设计;实验研究第一部分:引言机器人技术的发展给人们的生

新型爬壁机器人磁吸附单元优化设计.docx
新型爬壁机器人磁吸附单元优化设计随着科技的不断进步,机器人技术也在不断发展。传统的机器人只能在平面或低高度进行操作,而无法进行爬墙、攀爬等任务。为解决这一问题,研发了新型爬壁机器人。其中,磁吸附单元是机器人实现爬壁功能的重要组成部分。本文旨在针对该磁吸附单元进行优化设计。第一部分:磁吸附单元的工作原理磁吸附单元是通过电磁吸附作用来实现机器人在墙上的固定。该单元主要由电磁铁、减震垫、排气阀和导向装置等部分组成。在运行时,机器人通过电磁铁产生一定的磁场,使主体吸附在墙上,实现固定。此时,为了避免电机震动引起的
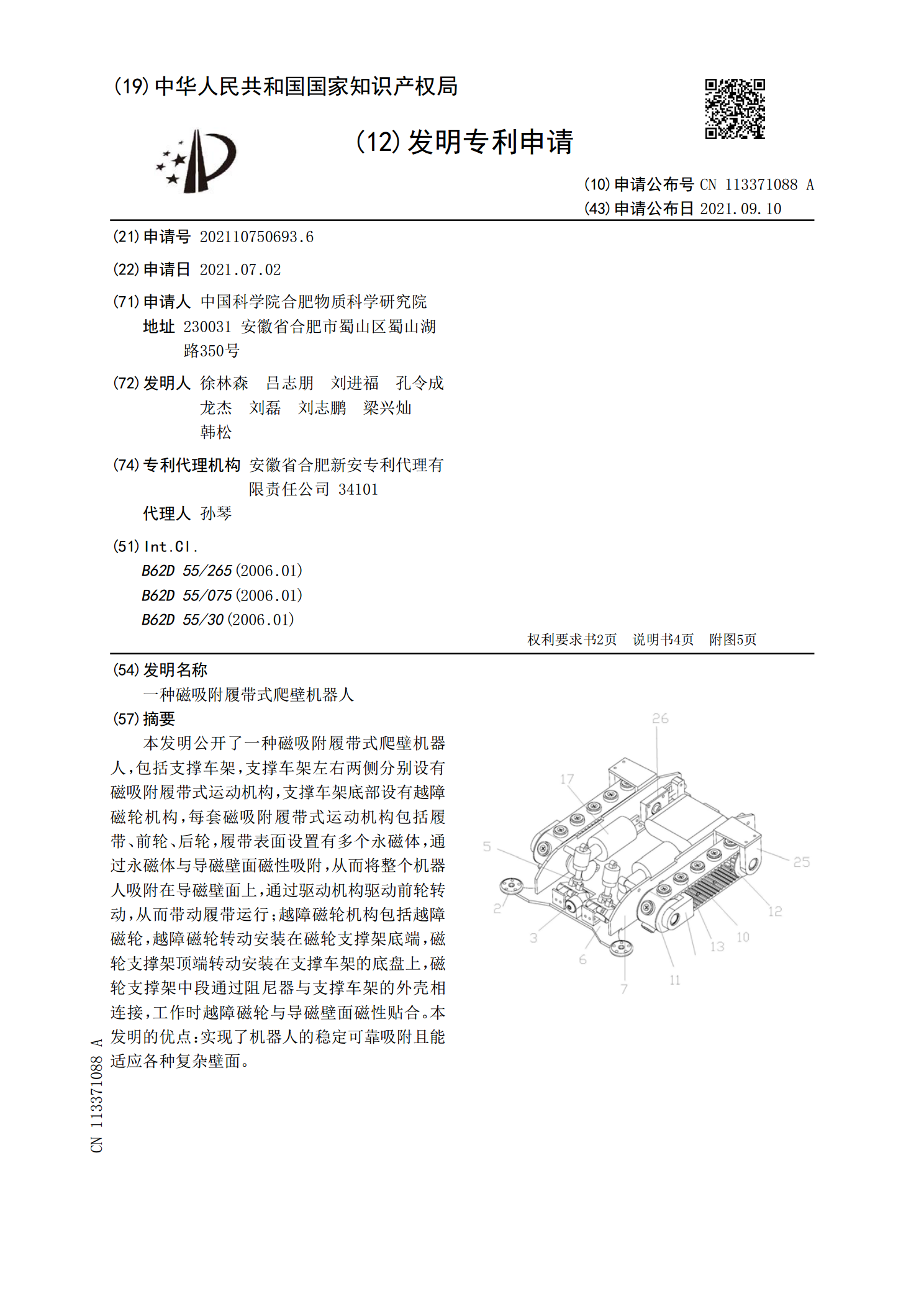
一种磁吸附履带式爬壁机器人.pdf
本发明公开了一种磁吸附履带式爬壁机器人,包括支撑车架,支撑车架左右两侧分别设有磁吸附履带式运动机构,支撑车架底部设有越障磁轮机构,每套磁吸附履带式运动机构包括履带、前轮、后轮,履带表面设置有多个永磁体,通过永磁体与导磁壁面磁性吸附,从而将整个机器人吸附在导磁壁面上,通过驱动机构驱动前轮转动,从而带动履带运行;越障磁轮机构包括越障磁轮,越障磁轮转动安装在磁轮支撑架底端,磁轮支撑架顶端转动安装在支撑车架的底盘上,磁轮支撑架中段通过阻尼器与支撑车架的外壳相连接,工作时越障磁轮与导磁壁面磁性贴合。本发明的优点:实

磁吸附检测爬壁机器人的研究.docx
磁吸附检测爬壁机器人的研究磁吸附检测爬壁机器人的研究摘要:随着工业自动化的发展,机器人在各个领域得到了广泛应用。爬壁机器人作为一种特殊的机器人类型,能够在垂直壁面上进行运动,具有很高的应用潜力。然而,在爬壁过程中,机器人需要保证其精准的定位以及安全的运动,而磁吸附检测技术则是实现这一目标的一种重要方法。本文通过对磁吸附检测爬壁机器人的研究进行综述,包括其工作原理、关键技术和应用前景,并对其存在的问题进行了深入分析和讨论。1.引言近年来,爬壁机器人逐渐成为机器人领域的研究热点之一。它能够在垂直壁面上自由移动
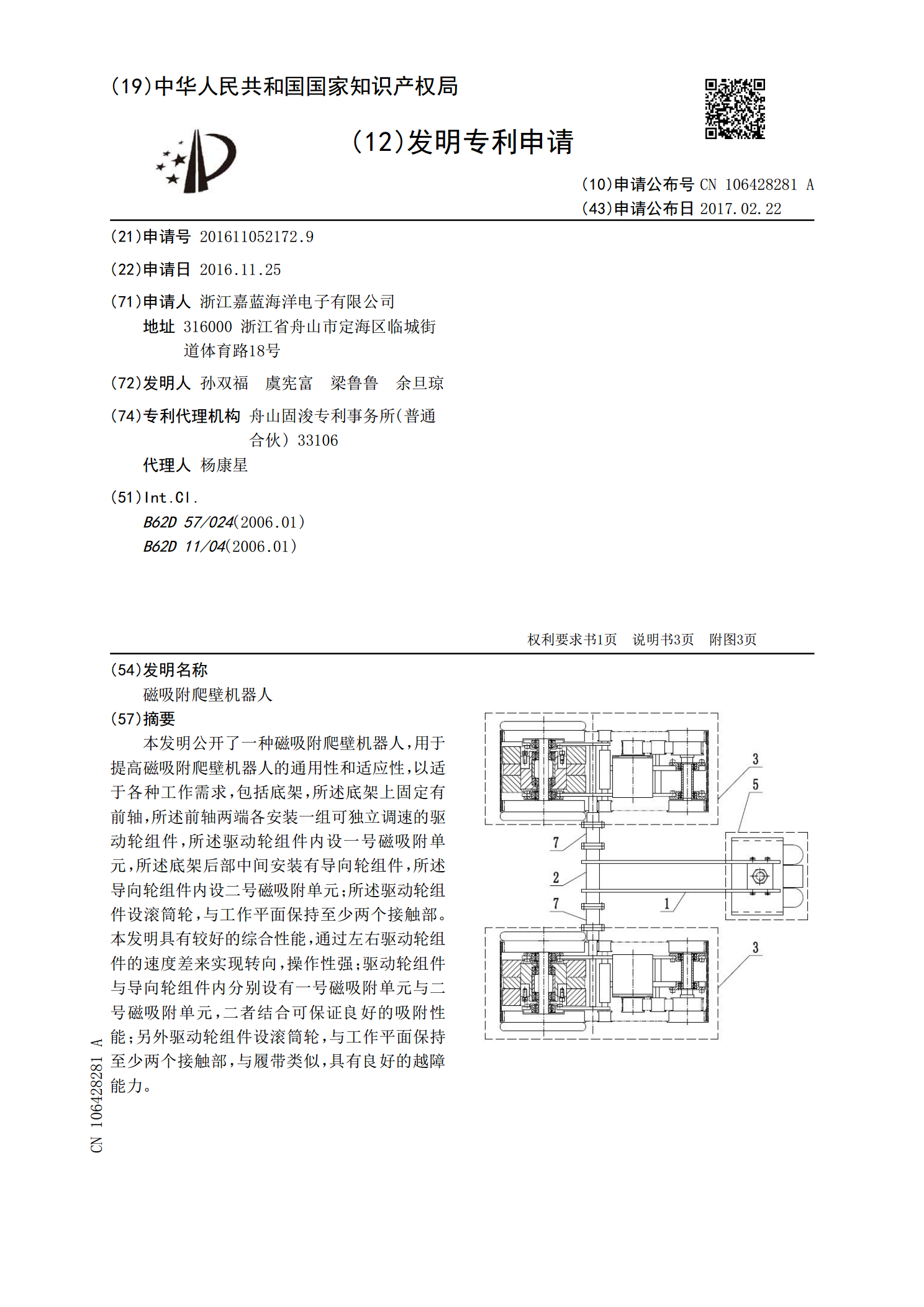
磁吸附爬壁机器人.pdf
本发明公开了一种磁吸附爬壁机器人,用于提高磁吸附爬壁机器人的通用性和适应性,以适于各种工作需求,包括底架,所述底架上固定有前轴,所述前轴两端各安装一组可独立调速的驱动轮组件,所述驱动轮组件内设一号磁吸附单元,所述底架后部中间安装有导向轮组件,所述导向轮组件内设二号磁吸附单元;所述驱动轮组件设滚筒轮,与工作平面保持至少两个接触部。本发明具有较好的综合性能,通过左右驱动轮组件的速度差来实现转向,操作性强;驱动轮组件与导向轮组件内分别设有一号磁吸附单元与二号磁吸附单元,二者结合可保证良好的吸附性能;另外驱动轮组