
基于ROS的家庭陪护机器人自主充电系统研究与设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于ROS的家庭陪护机器人自主充电系统研究与设计.docx
基于ROS的家庭陪护机器人自主充电系统研究与设计基于ROS的家庭陪护机器人自主充电系统研究与设计摘要:随着人口老龄化的加剧,家庭陪护机器人在养老护理中发挥着越来越重要的角色。然而,传统的家庭陪护机器人存在着充电问题,需要人工干预或定期回充电坐标,不利于其长时间的工作。本文针对这一问题,以ROS系统为基础,研究与设计了一种家庭陪护机器人自主充电系统,通过对其充电需求的分析和基于SLAM的定位与导航技术,实现了机器人的自主充电功能。实验结果表明,该系统能够有效解决家庭陪护机器人在充电方面的问题,提高了其工作效

基于ROS的家庭陪护机器人自主充电系统研究与设计的开题报告.docx
基于ROS的家庭陪护机器人自主充电系统研究与设计的开题报告一、研究背景与意义随着老龄化社会的到来,越来越多的家庭开始需要陪护机器人来照顾年迈的父母或祖父母。然而,目前市场上的陪护机器人通常需要人为地将其带到充电座上进行充电,这种方式显然并不智能化、自动化,也给用户带来了不便利,因而有必要研究开发一种基于ROS的自主充电系统。该系统需要具备以下特点:1.可以根据充电电量的情况自主控制充电座的出现与回收;2.能够自主判断充电座与机器人之间的距离并准确停靠;3.结合传感器实现环境探测,避免因为障碍物而无法充电或

基于ROS的家庭陪护机器人自主充电系统研究与设计的任务书.docx
基于ROS的家庭陪护机器人自主充电系统研究与设计的任务书任务书任务书标题:基于ROS的家庭陪护机器人自主充电系统研究与设计任务来源:本科毕业设计任务时间:2021年9月至2022年3月研究背景:近年来,随着人口老龄化的加剧和人们对生活质量的不断追求,家庭陪护机器人逐渐走进人们的生活。制造商们力图将更多的功能和技术加入到家庭陪护机器人的开发中,以满足消费者的需求,如自主导航、视觉识别、语音交互等。然而,在实际使用中,这些机器人面临着许多问题,包括电量不足、难以自主充电等。因此,本项目旨在研究和设计家庭陪护机

基于ROS的家庭服务机器人设计.pptx
基于ROS的家庭服务机器人设计目录机器人总体设计硬件架构软件架构通信协议电源系统ROS与机器人ROS介绍ROS在机器人领域的应用ROS与家庭服务机器人的结合ROS在机器人设计中的优势家庭服务机器人功能实现语音识别与处理图像识别与处理导航与定位家庭自动化控制机器人硬件选型与集成传感器选型执行器选型控制器选型集成测试与验证机器人软件实现与调试软件开发环境搭建算法设计与实现程序调试与优化实时操作系统应用机器人应用场景与未来发展家庭服务机器人应用场景机器人技术发展趋势ROS在机器人领域的发展前景基于ROS的家庭服
一种基于ROS的自主导航机器人.pdf
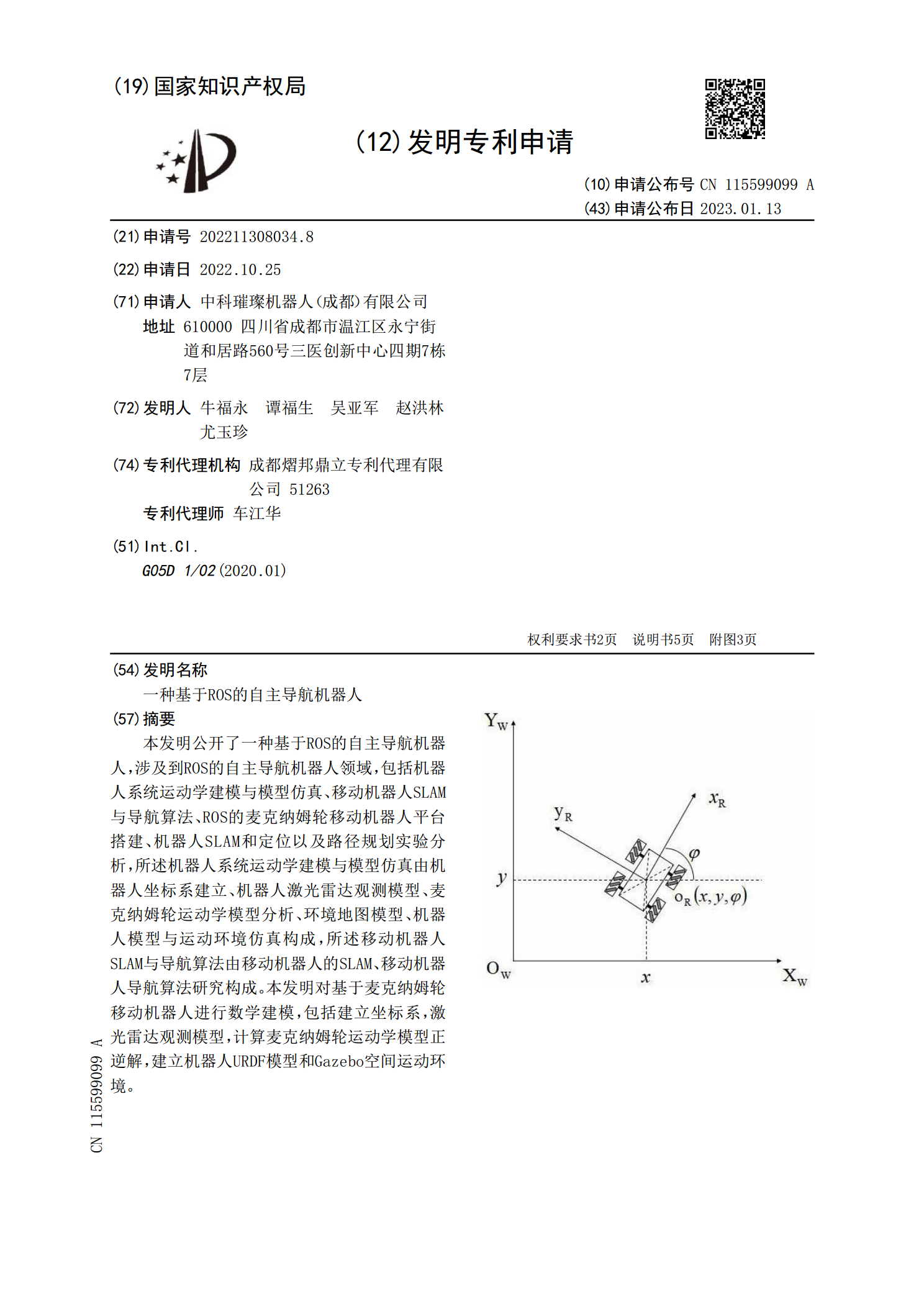
本发明公开了一种基于ROS的自主导航机器人,涉及到ROS的自主导航机器人领域,包括机器人系统运动学建模与模型仿真、移动机器人SLAM与导航算法、ROS的麦克纳姆轮移动机器人平台搭建、机器人SLAM和定位以及路径规划实验分析,所述机器人系统运动学建模与模型仿真由机器人坐标系建立、机器人激光雷达观测模型、麦克纳姆轮运动学模型分析、环境地图模型、机器人模型与运动环境仿真构成,所述移动机器人SLAM与导航算法由移动机器人的SLAM、移动机器人导航算法研究构成。本发明对基于麦克纳姆轮移动机器人进行数学建模,包括建立