
一种基于ROS的自主导航机器人.pdf

一吃****书竹

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于ROS的自主导航机器人.pdf
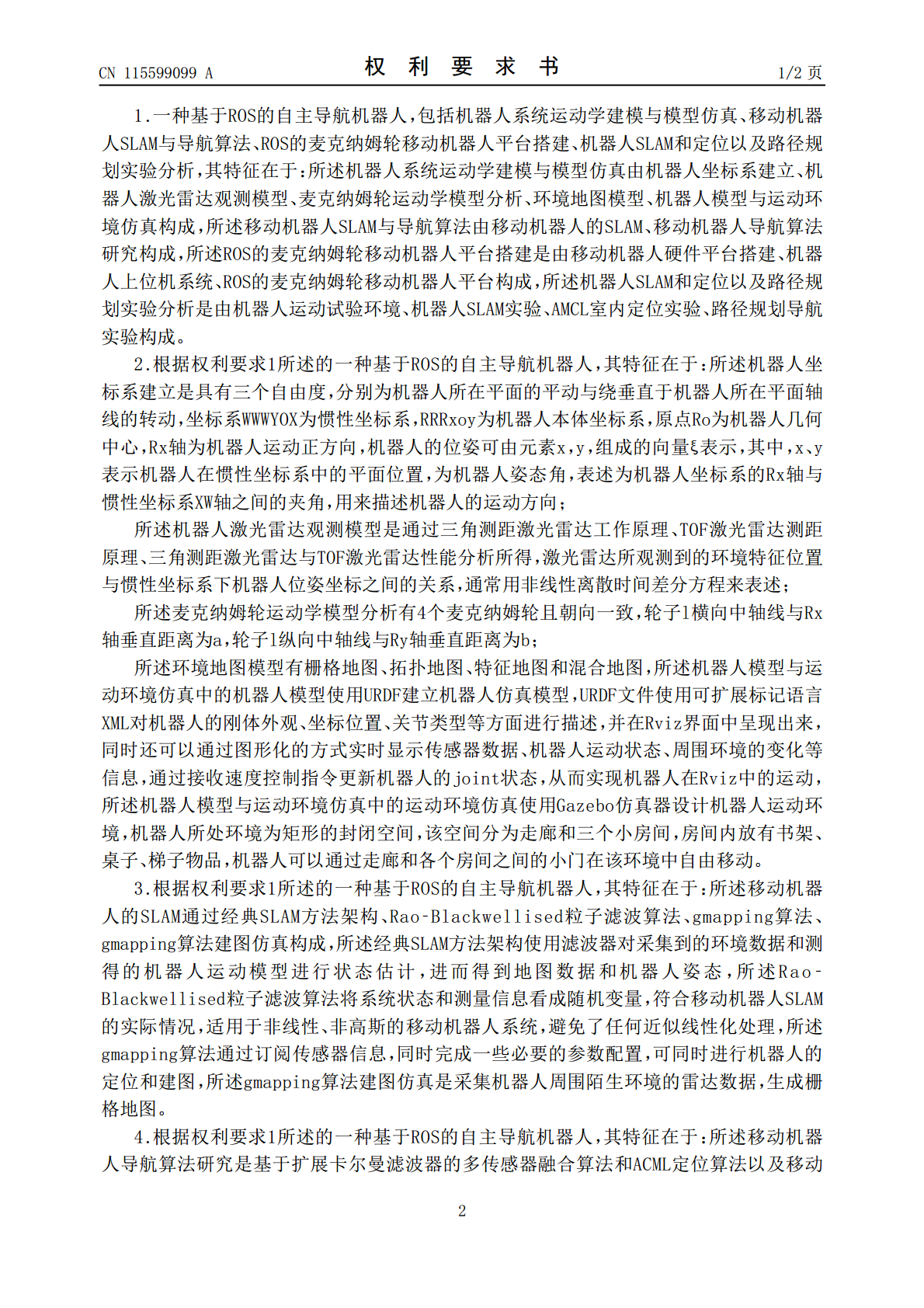
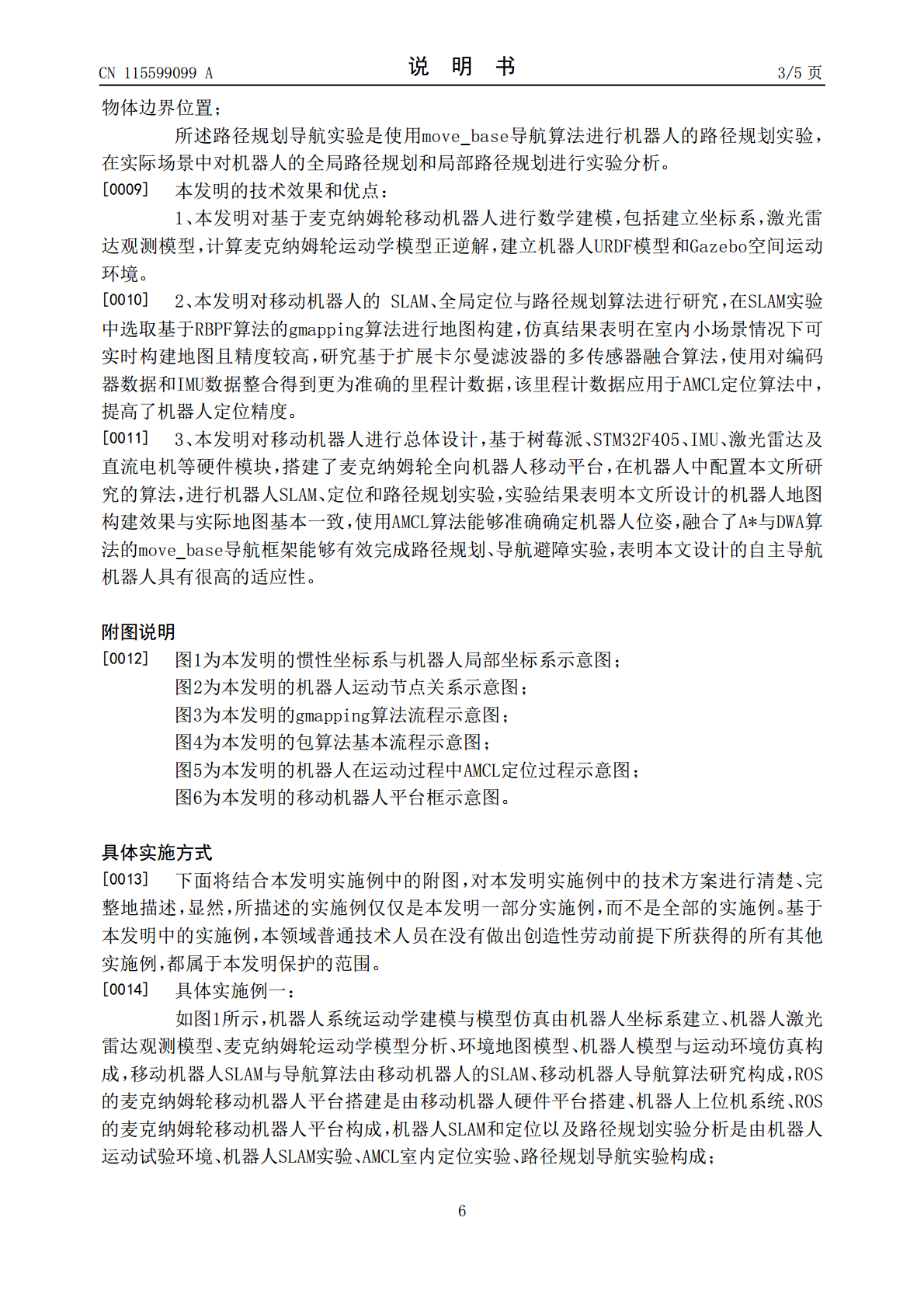
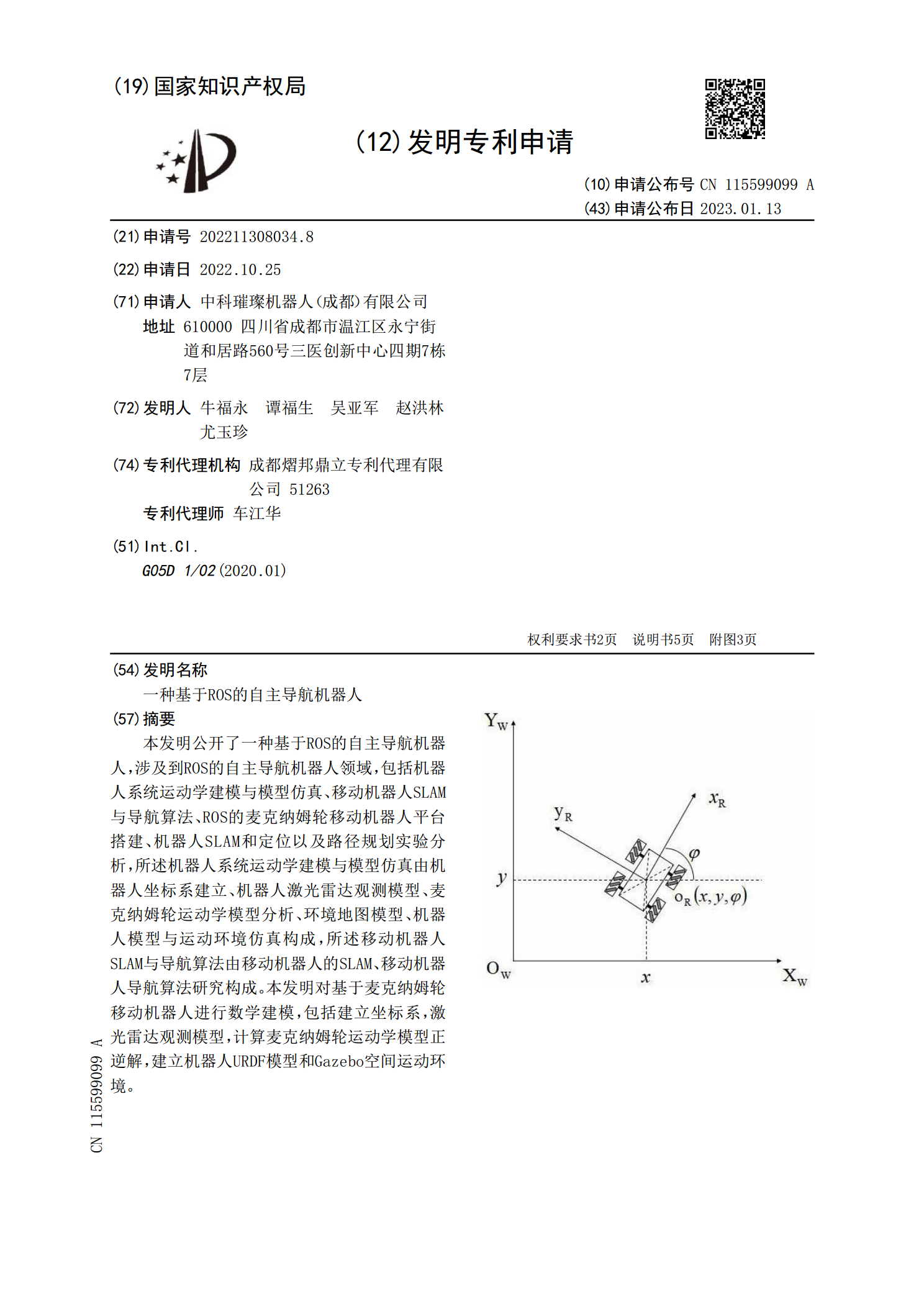
本发明公开了一种基于ROS的自主导航机器人,涉及到ROS的自主导航机器人领域,包括机器人系统运动学建模与模型仿真、移动机器人SLAM与导航算法、ROS的麦克纳姆轮移动机器人平台搭建、机器人SLAM和定位以及路径规划实验分析,所述机器人系统运动学建模与模型仿真由机器人坐标系建立、机器人激光雷达观测模型、麦克纳姆轮运动学模型分析、环境地图模型、机器人模型与运动环境仿真构成,所述移动机器人SLAM与导航算法由移动机器人的SLAM、移动机器人导航算法研究构成。本发明对基于麦克纳姆轮移动机器人进行数学建模,包括建立

基于ROS的竞赛机器人自主定位与导航技术研究.docx
基于ROS的竞赛机器人自主定位与导航技术研究基于ROS的竞赛机器人自主定位与导航技术研究摘要:随着机器人技术的飞速发展,机器人越来越多地应用于各种竞赛中。竞赛机器人的自主定位与导航技术是关键的研究方向。本论文以ROS(机器人操作系统)为基础,研究了竞赛机器人的自主定位与导航技术。通过分析竞赛机器人的需求和现有技术,提出了一种基于ROS的竞赛机器人自主定位与导航系统的设计方案,并对其进行了实验验证。实验结果表明,该系统可以实现竞赛机器人的自主定位与导航,具有较高的精度和稳定性。关键词:ROS、竞赛机器人、自

基于视觉与激光雷达的ROS机器人自主导航研究的开题报告.docx
基于视觉与激光雷达的ROS机器人自主导航研究的开题报告一、选题背景随着机器人技术的不断发展,机器人自主导航技术越来越受到人们的关注。其中,视觉和激光雷达是常见的两种机器人定位和导航技术。视觉可以通过图像识别和处理获取场景信息,激光雷达则可以实现高精度的距离感知。通过对这两个技术的综合利用,可以提高机器人的定位精度和导航能力,实现更加智能化和自主化的机器人控制。因此,基于视觉和激光雷达的ROS机器人自主导航研究具有重要意义。二、研究内容本次研究的主要目标是实现基于视觉和激光雷达的ROS机器人自主导航技术。具

基于ROS的室内导航机器人设计与实现.docx
基于ROS的室内导航机器人设计与实现概述随着科技的不断发展,对智能化服务的需求也越来越大。在其中之一的室内导航中,机器人成为了一个重要的选项。ROS机器人操作系统为机器人导航系统提供了快速、灵活的实现方案,并为机器人的移动提供了很多功能。本论文主要介绍室内导航机器人的设计与实现,并探讨其中的关键技术和问题。设计与实现基于ROS的室内导航机器人主要由以下组件组成:1.机器人本体:包括机器人的底盘、电机、传感器等元器件。2.姿态检测系统:通过检测机器人的姿态实现机器人的定位。3.感知系统:包括激光雷达、RGB

基于视觉与激光雷达的ROS机器人自主导航研究的任务书.docx
基于视觉与激光雷达的ROS机器人自主导航研究的任务书任务书任务名称:基于视觉与激光雷达的ROS机器人自主导航研究任务目的:随着机器人技术的发展,机器人在工业、服务、医疗等领域应用越来越广泛。机器人能够代替人类完成繁琐、危险或者重复性强的工作,在一定程度上能够提高工作效率,降低人力成本。机器人自主导航是机器人技术中的关键技术之一,通过机器人自主导航技术,机器人可以根据环境变化自主地规划路径、避开障碍物,实现自主的工作或服务。本任务旨在基于ROS(RobotOperatingSystem)平台,研究基于视觉与