
基于三轮全向移动平台的运动控制系统研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于三轮全向移动平台的运动控制系统研究.docx
基于三轮全向移动平台的运动控制系统研究摘要近年来,随着全向移动技术的不断成熟,人们对于基于三轮全向移动平台的运动控制系统的研究和应用越来越重视。本文针对这一问题进行了深入的研究,并通过建立数学模型、控制算法设计、仿真验证等多个方面对于这一问题进行了详细的探讨,最终设计出了一套高效稳定的基于三轮全向移动平台的运动控制系统。关键词:三轮全向移动平台,运动控制系统,数学模型,控制算法,仿真验证AbstractInrecentyears,withthecontinuousmaturityofomnidirecti

基于复合控制算法的全向移动平台设计与实现.docx
基于复合控制算法的全向移动平台设计与实现本文将介绍基于复合控制算法的全向移动平台的设计与实现。全向移动平台是一种可以沿多个方向移动的机器人平台,它可以在不同的方向上移动,从而可以实现多种任务,例如物流搬运、自动导航等。在本文中,我们将介绍如何设计一个全向移动平台,并使用复合控制算法控制它的运动。首先,我们需要确定全向移动平台的设计需求,包括平台的尺寸、载重能力、速度等技术指标。在此基础上,我们可以选取合适的机电设备进行组装,同时考虑到平台的稳定性与安全性,应该进行合适的结构设计和软件控制,以保证平台的可靠
全向移动平台.pdf
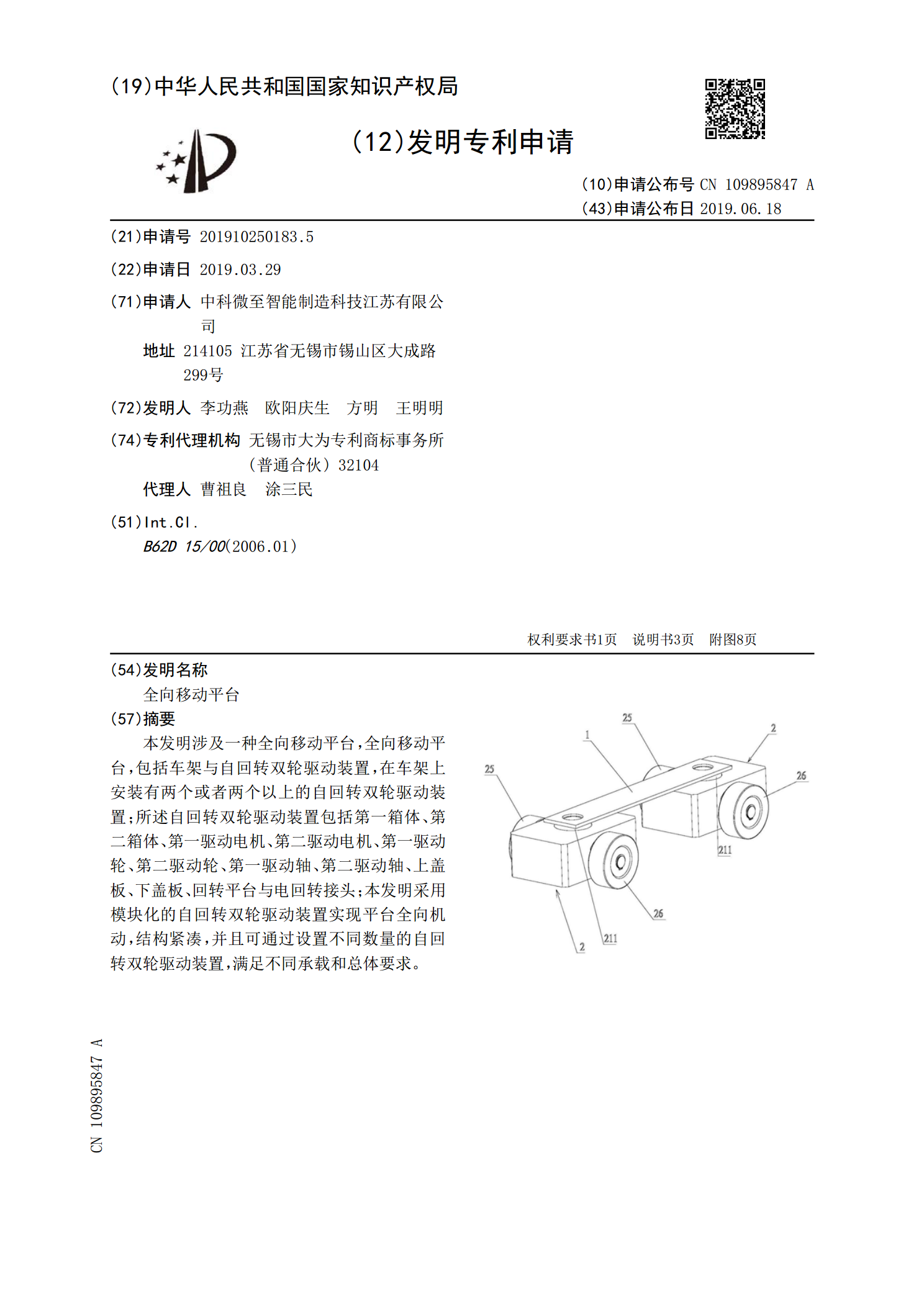
本发明涉及一种全向移动平台,全向移动平台,包括车架与自回转双轮驱动装置,在车架上安装有两个或者两个以上的自回转双轮驱动装置;所述自回转双轮驱动装置包括第一箱体、第二箱体、第一驱动电机、第二驱动电机、第一驱动轮、第二驱动轮、第一驱动轴、第二驱动轴、上盖板、下盖板、回转平台与电回转接头;本发明采用模块化的自回转双轮驱动装置实现平台全向机动,结构紧凑,并且可通过设置不同数量的自回转双轮驱动装置,满足不同承载和总体要求。

基于STM32F429的全向运动平台的运动控制.docx
基于STM32F429的全向运动平台的运动控制基于STM32F429的全向运动平台的运动控制摘要:全向运动平台是一种可以在不同方向上自由移动和旋转的机械装置,广泛应用于工业自动化、室内导航、物流运输等领域。本论文介绍了基于STM32F429的全向运动平台的运动控制。首先,介绍了全向运动平台的结构和工作原理;然后,详细阐述了基于STM32F429的硬件设计和程序设计;最后,进行了实验验证和性能分析。实验结果表明,基于STM32F429的全向运动平台具有良好的运动控制性能和稳定性,能够满足各种实际应用需求。关

基于麦克纳姆轮的全向AGV移动平台控制方法研究.docx
基于麦克纳姆轮的全向AGV移动平台控制方法研究基于麦克纳姆轮的全向AGV移动平台控制方法研究摘要:随着工业自动化和智能化的快速发展,自动导引车辆(AGV)被广泛应用于物流、生产线等领域。全向AGV是一种能够实现多向行驶和精确定位的移动平台,其具备快速、高效和灵活等特点。本论文针对基于麦克纳姆轮的全向AGV移动平台控制进行深入研究,通过分析麦克纳姆轮的运动学模型和动力学模型,提出了一种基于PID控制的运动控制算法,并通过实验验证了该算法的有效性。关键词:全向AGV,麦克纳姆轮,运动控制,PID控制1.引言自