
基于复合控制算法的全向移动平台设计与实现.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于复合控制算法的全向移动平台设计与实现.docx
基于复合控制算法的全向移动平台设计与实现本文将介绍基于复合控制算法的全向移动平台的设计与实现。全向移动平台是一种可以沿多个方向移动的机器人平台,它可以在不同的方向上移动,从而可以实现多种任务,例如物流搬运、自动导航等。在本文中,我们将介绍如何设计一个全向移动平台,并使用复合控制算法控制它的运动。首先,我们需要确定全向移动平台的设计需求,包括平台的尺寸、载重能力、速度等技术指标。在此基础上,我们可以选取合适的机电设备进行组装,同时考虑到平台的稳定性与安全性,应该进行合适的结构设计和软件控制,以保证平台的可靠

基于ARM的全向移动平台智能循迹系统设计.docx
基于ARM的全向移动平台智能循迹系统设计基于ARM的全向移动平台智能循迹系统设计摘要:随着机器人技术的发展和应用范围的扩大,智能循迹系统在自动导航和物体跟踪等方面显示出了巨大的潜力。本文基于ARM平台,设计了一个全向移动平台智能循迹系统。系统利用全向轮设计,使机器人具有良好的移动性能和敏捷性。通过使用视觉传感器进行图像采集和处理,结合PID控制算法实现了对目标物体的自动跟踪和循迹功能。实验结果表明,该系统具有较高的跟踪精度和准确性,可以广泛应用于自动导航和物体跟踪领域。关键词:ARM;全向移动平台;智能循
基于全向轮的核电检修全方位移动平台的研究与实现.pptx
基于全向轮的核电检修全方位移动平台的研究与实现目录添加章节标题全向轮核电检修全方位移动平台概述平台设计背景平台设计目的和意义平台工作原理简介全向轮技术及其应用全向轮技术介绍全向轮技术的优势全向轮技术在核电检修领域的应用前景核电检修全方位移动平台的设计与实现平台结构设计平台功能模块设计平台控制算法设计平台测试与验证平台应用效果及推广价值平台应用效果分析平台推广价值评估未来应用场景展望总结与展望研究成果总结未来研究方向展望THANKYOU
全向移动平台.pdf
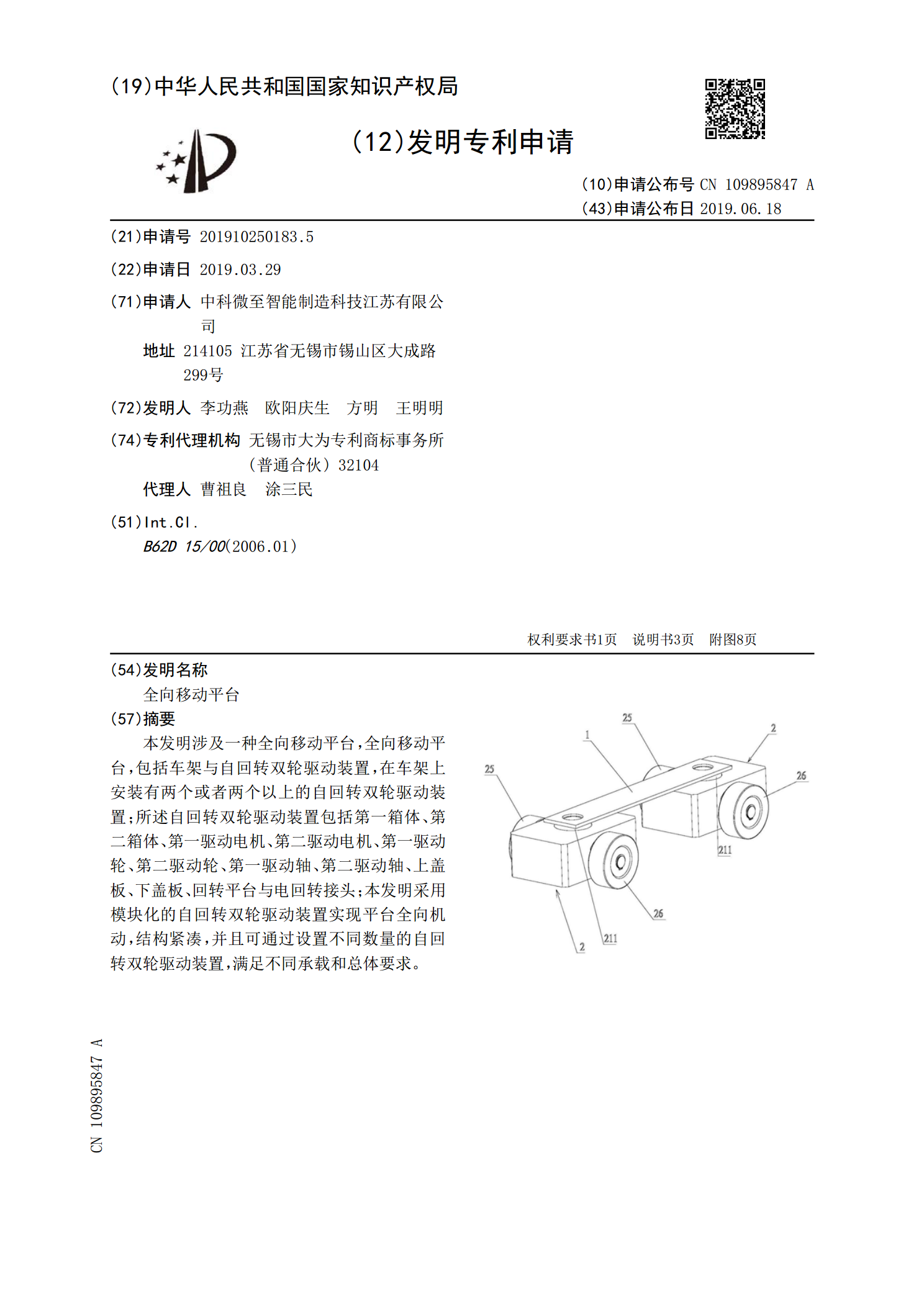
本发明涉及一种全向移动平台,全向移动平台,包括车架与自回转双轮驱动装置,在车架上安装有两个或者两个以上的自回转双轮驱动装置;所述自回转双轮驱动装置包括第一箱体、第二箱体、第一驱动电机、第二驱动电机、第一驱动轮、第二驱动轮、第一驱动轴、第二驱动轴、上盖板、下盖板、回转平台与电回转接头;本发明采用模块化的自回转双轮驱动装置实现平台全向机动,结构紧凑,并且可通过设置不同数量的自回转双轮驱动装置,满足不同承载和总体要求。

基于麦克纳姆轮的全向AGV移动平台控制方法研究.docx
基于麦克纳姆轮的全向AGV移动平台控制方法研究基于麦克纳姆轮的全向AGV移动平台控制方法研究摘要:随着工业自动化和智能化的快速发展,自动导引车辆(AGV)被广泛应用于物流、生产线等领域。全向AGV是一种能够实现多向行驶和精确定位的移动平台,其具备快速、高效和灵活等特点。本论文针对基于麦克纳姆轮的全向AGV移动平台控制进行深入研究,通过分析麦克纳姆轮的运动学模型和动力学模型,提出了一种基于PID控制的运动控制算法,并通过实验验证了该算法的有效性。关键词:全向AGV,麦克纳姆轮,运动控制,PID控制1.引言自