
基于STM32F429的全向运动平台的运动控制.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于STM32F429的全向运动平台的运动控制.docx
基于STM32F429的全向运动平台的运动控制基于STM32F429的全向运动平台的运动控制摘要:全向运动平台是一种可以在不同方向上自由移动和旋转的机械装置,广泛应用于工业自动化、室内导航、物流运输等领域。本论文介绍了基于STM32F429的全向运动平台的运动控制。首先,介绍了全向运动平台的结构和工作原理;然后,详细阐述了基于STM32F429的硬件设计和程序设计;最后,进行了实验验证和性能分析。实验结果表明,基于STM32F429的全向运动平台具有良好的运动控制性能和稳定性,能够满足各种实际应用需求。关

基于球轮全向驱动的运动平台.pdf
本发明涉及一种能够自主运动的智能运动平台,特别涉及一种通过控制三个球轮的运动从而实现平台整体的全向运动的机构,属于电机驱动、传感器测距、无线通讯和自动控制技术领域;具体包括三套同样的球轮驱动机械结构和三个电机驱动器、环境感知系统和平台控制系统;环境感知系统对周围环境探测后,将得到的环境信息传递给平台控制系统的平台主控制模块;平台主控制模块处理得出控制指令,发给电机驱动器控制模块,球轮在驱动电机的控制下滚动,实现平台的运动。本发明基于球体滚动的全向性原理,可实现人工操控与自主运行两种工作模式,以及单平台运行

基于三轮全向移动平台的运动控制系统研究.docx
基于三轮全向移动平台的运动控制系统研究摘要近年来,随着全向移动技术的不断成熟,人们对于基于三轮全向移动平台的运动控制系统的研究和应用越来越重视。本文针对这一问题进行了深入的研究,并通过建立数学模型、控制算法设计、仿真验证等多个方面对于这一问题进行了详细的探讨,最终设计出了一套高效稳定的基于三轮全向移动平台的运动控制系统。关键词:三轮全向移动平台,运动控制系统,数学模型,控制算法,仿真验证AbstractInrecentyears,withthecontinuousmaturityofomnidirecti

全向轮运动平台分析.docx
全轮转向式小车一、坐标系与位置表示图1地理坐标系与体坐标系定义如图所示的坐标系,地理坐标系{XI,YI},体坐标系{XR,YR},坐标之间夹角为θ,P点位置描述为εI=xyθ由地理坐标转为体坐标的映射由正交旋转矩阵完成εR=RθεI=cosθsinθ0-sinθcosθ0001xyθ反方向变换矩阵如下Rθ-1=cosθ-sinθ0sinθcosθ0001二、运动学模型与控制律2.1全向轮直角坐标运动学方程图2轨迹跟踪示意图坐标系参照图2,对于地理坐标中的位置指令pI=(xryrθr)和速度指令qI=(vr
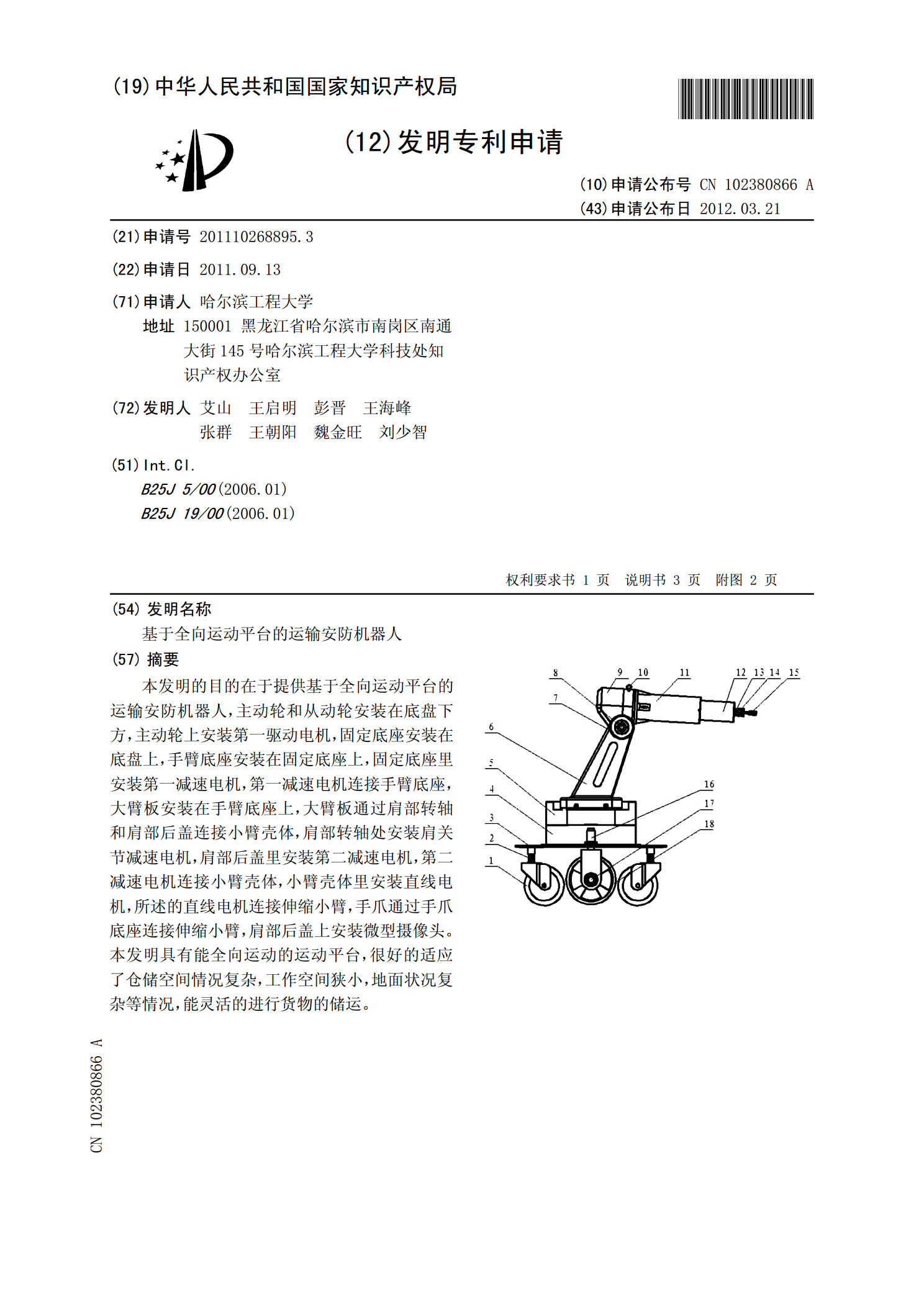
基于全向运动平台的运输安防机器人.pdf
本发明的目的在于提供基于全向运动平台的运输安防机器人,主动轮和从动轮安装在底盘下方,主动轮上安装第一驱动电机,固定底座安装在底盘上,手臂底座安装在固定底座上,固定底座里安装第一减速电机,第一减速电机连接手臂底座,大臂板安装在手臂底座上,大臂板通过肩部转轴和肩部后盖连接小臂壳体,肩部转轴处安装肩关节减速电机,肩部后盖里安装第二减速电机,第二减速电机连接小臂壳体,小臂壳体里安装直线电机,所述的直线电机连接伸缩小臂,手爪通过手爪底座连接伸缩小臂,肩部后盖上安装微型摄像头。本发明具有能全向运动的运动平台,很好的适