
可用于自动驾驶的全冗余架构转向传感器研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

可用于自动驾驶的全冗余架构转向传感器研究.docx
可用于自动驾驶的全冗余架构转向传感器研究随着自动驾驶技术的不断发展和普及,汽车制造商和科技公司越来越关注如何构建更为可靠和安全的自动驾驶系统。而全冗余架构转向传感器是自动驾驶系统中的一个重要组成部分,其作用是监控车辆的转向情况,从而帮助车辆做出正确的决策和控制。本文将探讨全冗余架构转向传感器的研究现状和发展趋势。一、全冗余架构转向传感器的定义和作用全冗余架构转向传感器是指在自动驾驶车辆中,使用冗余传感器进行转向信息的采集和处理,以确保在某一传感器出现故障时,仍能够保持车辆的稳定性和安全性。全冗余架构转向传

用于自动驾驶的冗余转向控制装置.pdf
一种能够由冗余制动系统控制的转向系统,该冗余制动系统包括主要制动控制模块、辅助制动控制模块和由主要制动控制模块或辅助制动控制模块控制的多个制动单元。存在连接到转向系统的部件的至少一个液压马达,并且液压马达中的流体压力由辅助制动控制模块控制。转向系统的车轮被配置成当辅助制动控制模块在第一操作模式期间操作液压马达时进行右转弯,并且转向系统的车轮被配置成当辅助制动控制模块在第二操作模式期间操作液压马达时进行左转弯。

一种自动驾驶线控可伸缩机械冗余式转向管柱.pdf
本发明公开了一种自动驾驶线控可伸缩机械冗余式转向管柱,包括方向盘连接螺纹、方向盘俯仰角度调节机构、轴承、伸缩管柱、离合机构、伸缩套筒、转向下轴、与转向下轴铰接于一起的转向下轴铰接接头、伸缩推力电机、伸缩套筒密封螺纹、伸缩套筒下部连接件、轴承固定件、方向盘俯仰角传动齿轮、方向盘俯仰角调节电机、伸缩管柱传动齿轮以及方向盘转角调节电机。本发明自动驾驶线控可伸缩机械冗余式转向管柱电动可伸缩,可以提高安全员或司机上下车的便利性,同时增加了有人驾驶和无人驾驶之间模式切换的灵活性,同时满足有人驾驶和无人驾驶对转向系统的
隔离部件、自动驾驶车辆冗余架构及隔离部件控制方法.pdf
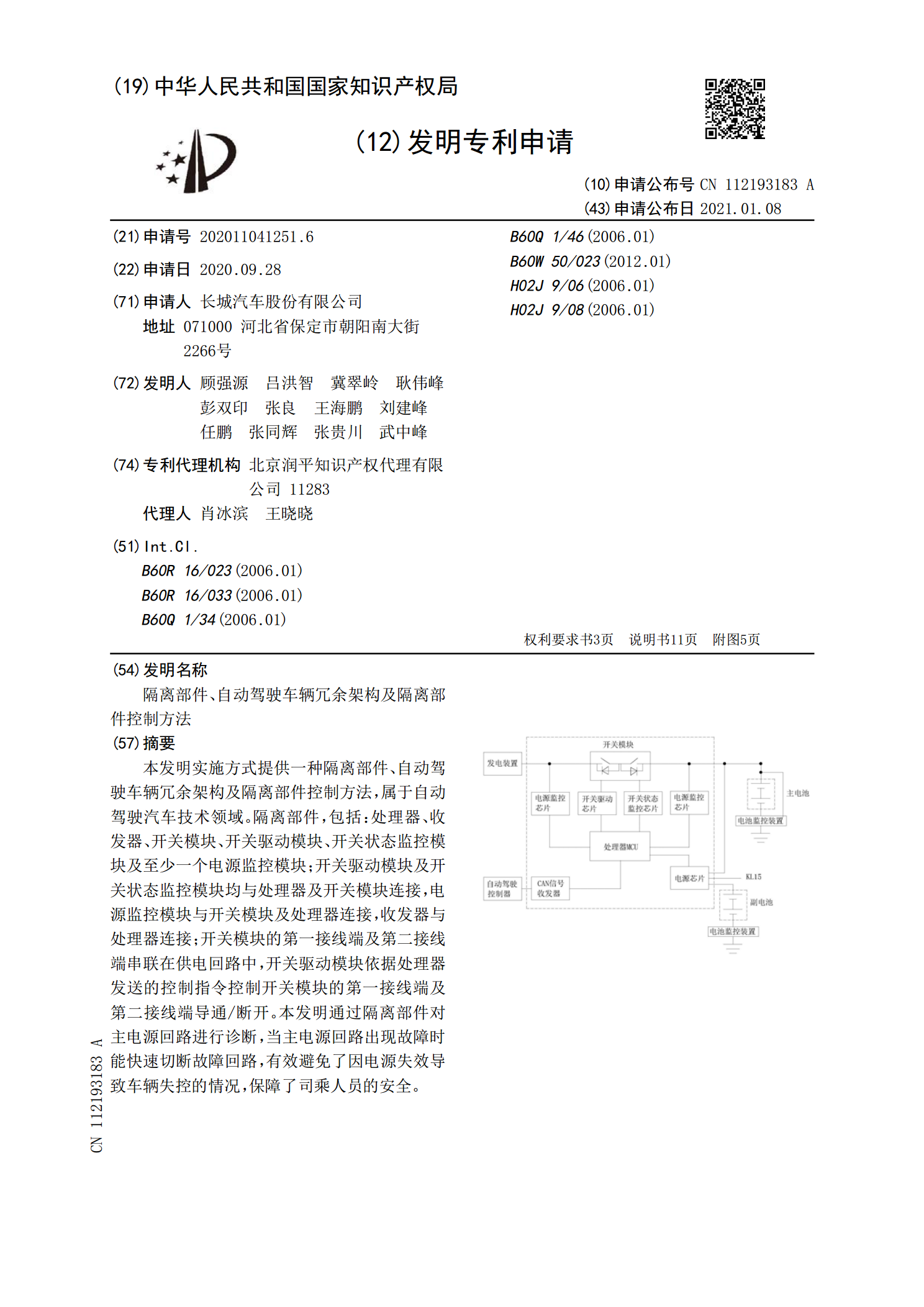
本发明实施方式提供一种隔离部件、自动驾驶车辆冗余架构及隔离部件控制方法,属于自动驾驶汽车技术领域。隔离部件,包括:处理器、收发器、开关模块、开关驱动模块、开关状态监控模块及至少一个电源监控模块;开关驱动模块及开关状态监控模块均与处理器及开关模块连接,电源监控模块与开关模块及处理器连接,收发器与处理器连接;开关模块的第一接线端及第二接线端串联在供电回路中,开关驱动模块依据处理器发送的控制指令控制开关模块的第一接线端及第二接线端导通/断开。本发明通过隔离部件对主电源回路进行诊断,当主电源回路出现故障时能快速切
用于可转向的车辆的转向系统.pdf
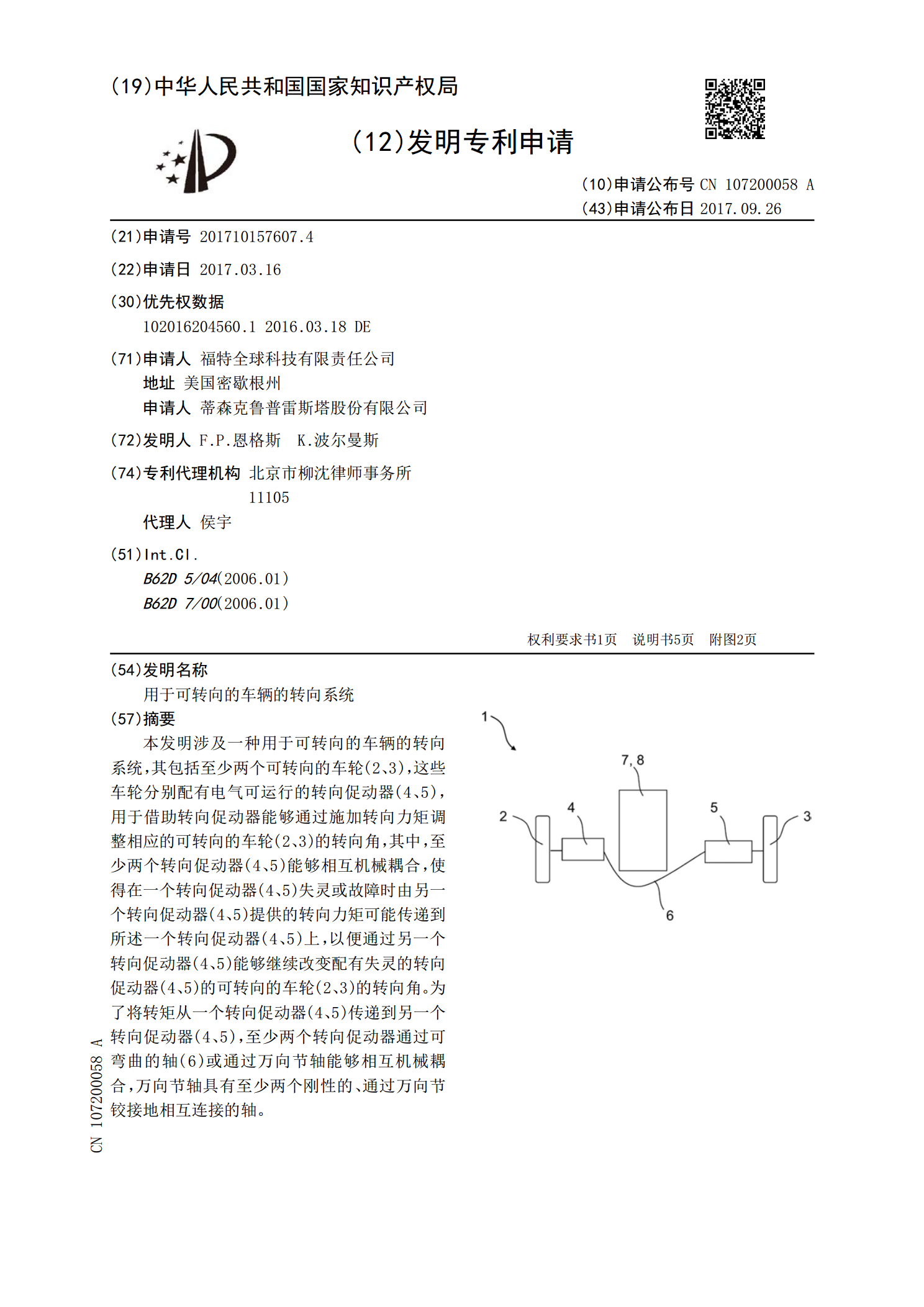
本发明涉及一种用于可转向的车辆的转向系统,其包括至少两个可转向的车轮(2、3),这些车轮分别配有电气可运行的转向促动器(4、5),用于借助转向促动器能够通过施加转向力矩调整相应的可转向的车轮(2、3)的转向角,其中,至少两个转向促动器(4、5)能够相互机械耦合,使得在一个转向促动器(4、5)失灵或故障时由另一个转向促动器(4、5)提供的转向力矩可能传递到所述一个转向促动器(4、5)上,以便通过另一个转向促动器(4、5)能够继续改变配有失灵的转向促动器(4、5)的可转向的车轮(2、3)的转向角。为了将转矩从